一种大型圆柱度仪气浮自动调心装置
文献发布时间:2023-06-19 09:55:50
技术领域
本发明属于大型圆柱度仪领域,具体地说是一种大型圆柱度仪气浮自动调心装置。
背景技术
在高质量产品的制造和高效率生产环境的构建中,测量技术起到了关键的作用,其重要性与日俱增。大型高精度圆柱度仪作为圆环、圆柱等回转体工件圆度、圆柱度、同轴度等形位误差测量的关键测量仪器,被广泛应用于汽车、航空航天等领域。尤其在生产国际化、全球经济一体化迅速发展的今天,为实现高精度零部件良好的互换性,要求高精度圆柱度仪必须具有更高的测量精度和测量效率。根据高精度圆柱度仪的工作原理,被测工件轴线应与量仪的回转轴线同轴,才能保证测量精度。然而,在实际操作中,同轴往往很难达到,偏心量的存在严重影响着圆柱度仪的测量精度。
我国生产的传统高精度圆柱度仪大部分采用人工调心的方法,费时费力,且测量精度低,如何实现自动调心一直是限制测量精度和测量效率的“瓶颈”。直径超过2.5米,重量达到3吨的专用大型工件圆柱度仪目前还是空白;国外仪器的价格过于昂贵,对测量环境的要求也很高,也因此限制了它们在国内市场上的应用。因此,研究大型高精度圆柱度仪的自动调心技术是目前测量领域的一个重要课题。
目前,圆柱度仪调心方法通常有两种类型:
小型台式,把工件装在回转的工作台上,测量头装在固定的立柱上,测量时工件跟随旋转台旋转,由于旋转台本体结构无法承受大重量大尺寸工件,因此不适用大型回转类工件。
大型落地式,把工件装在固定的工作台上,测量头安装在回转的主轴上。测量时,测量头与工件表面接触或非接触,仪器的回转部分转一周;因回转部分的支承轴承精度极高,故回转时测量头对被测表面将产生一高精度的圆轨迹,供评定精度与工艺分析之用。
大型落地式工件调心有几种,一种是人工调整圆心去除偏心量,费时费力难度大,精度低;另外一种是大型卡盘式,通过卡盘上的不同卡爪运动调整工件圆心偏心量,由于工件重,摩擦力大,卡盘结构强度要求非常高,对工件端面造成摩擦损伤;还有一种是双层相互垂直正交的导轨滑块机构,伺服电机或步进电机驱动实现调心功能,缺点是结构复杂,双层导轨滑块和众多固定连接件,累计误差大,尤其影响定位平台的平面度。
发明内容
为了解决现有大型圆柱度仪调心存在的上述问题,本发明的目的在于提供一种大型圆柱度仪气浮自动调心装置。该气浮自动调心装置实现了圆柱度仪偏心量高精度自动调整,且一次自动调心,偏心量就可达到要求,实现了圆柱度仪的自动调心功能,调心效率明显提高,为构建面向圆柱度仪的数字化集成测控系统提供了技术支持。
本发明的目的是通过以下技术方案来实现的:
本发明包括平台及联动耦合气浮基座,其中平台的水平投影为正方形,所述联动耦合气浮基座包括伺服电机、气浮矩形导轨、连接块、耦合连杆、固定块、十字轴滑块及气浮台单体,在所述平台的四角均设有气浮台单体,该平台相邻两角分别设有安装于所述平台上的伺服电机,另外相邻两角分别安装有所述固定块,每个所述伺服电机的输出端均设有气浮矩形导轨,该气浮矩形导轨的一端与所述伺服电机的输出端直连,另一端与一个所述气浮台单体连接,两个所述伺服电机输出的直线运动方向正交垂直,两个所述气浮矩形导轨均通过气管连接气源,另外两个所述气浮台单体通过十字轴滑块与两个固定块连接;每个所述气浮台单体的两侧对称安装有连接块,相邻两气浮台单体之间设有所述耦合连杆,每个所述耦合连杆的两端分别与相邻两气浮台单体上的连接块相连接。
其中:所述耦合连杆的一端与所连接的连接块之间设有关节轴承及芯轴,该关节轴承的一端与所述耦合连杆的一端相连,另一端开设有球头铰接孔,所述芯轴的一端安装于球头铰接孔内,另一端与连接块相连。
所述耦合连杆为空心结构,两端均加工有外螺纹,两端的外螺纹分别与两个所述关节轴承的一端的内螺纹配合安装。
所述芯轴外套设有垫筒,该垫筒位于所述关节轴承与连接块之间。
与所述气浮矩形导轨连接的气浮台单体上安装有导轨滑块,所述气浮矩形导轨输出端平面垂直方向与该导轨滑块正交连接。
四个所述气浮台单体等高设置,该四个气浮台单体的上表面共面,形成一个水平基准面,作为测量工作基准面。
所述平台底面的四脚均安装有地脚。
本发明的优点与积极效果为:
1.本发明通过采用耦合连杆把四个等高气浮台单体连接在一起,耦合联动,与大理石平台接触面形成联动耦合气浮基座,利用真空载荷空气轴承原理,气膜压力支撑气垫具有向上支撑力,同时真空腔吸引气垫向下形成预载荷,使得气垫承载刚度大,姿态稳定;通过调节气源有无,实现自定心与锁定;空气压力和真空负压都可以调整,可适应多种用途。
2.本发明通过联动耦合气浮基座内部平面X、Y方向两个伺服电机提供动力源驱动四个等高气浮台单体联动;两组平面正交导向十字滑块,用于平面正交导向,限制平面X、Y两个运动方向及行程,属于从动端导向,配合动力源实现正交平移调心;伺服电机端两组气浮矩形导轨与导轨滑块组合使用,限制正交平移方向与行程,属于驱动端导向。
3.本发明将大型工件在联动耦合气浮基座上面相当于漂浮状态,摩擦力非常小,用小功率伺服电机即可驱动运动,结构简单可靠,调心效率高,精度高。
附图说明
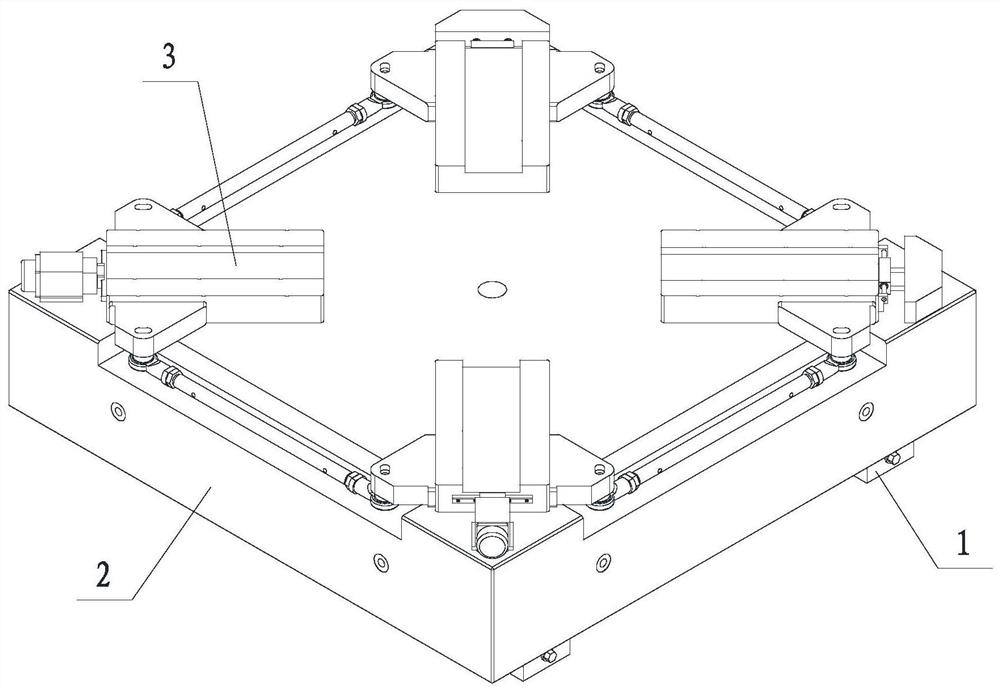
图1为本发明的立体结构示意图;
图2A为本发明的结构俯视图;
图2B为本发明的结构主视图;
图3A为本发明联动耦合气浮基座的立体结构示意图;
图3B为本发明联动耦合气浮基座的结构主视图;
图3C为本发明联动耦合气浮基座的结构俯视图;
图4A为本发明耦合连杆的立体结构示意图;
图4B为本发明耦合连杆的结构剖视图;
图5为本发明气浮台单体、十字轴滑块及固定块的立体结构示意图;
图6为本发明的使用状态结构示意图;
其中:1为地脚,2为平台,3为联动耦合气浮基座,4为伺服电机,5为气浮矩形导轨,6为导轨滑块,7为连接块,8为耦合连杆,9为关节轴承,10为芯轴,11为垫筒,12为固定块,13为十字轴滑块,14为气浮台单体。
具体实施方式
下面结合附图对本发明作进一步详述。
如图1、图2A及图2B所示,本发明包括平台2及联动耦合气浮基座3,其中平台2作为基础承重平台,保证稳定性,平台2的水平投影为正方形,本实施例的平台2采用大理石材质,在平台2底面的四脚均安装有地脚1,通过调整地脚1可以把平台2的平面度调整到符合要求。本实施例的地脚1为市购产品,购置于北京市长城机床附件有限责任公司,型号为CJMDT-03。
如图1、图3A、图3B及图3C所示,平台2上设有联动耦合气浮基座3,本实施例的联动耦合气浮基座3包括伺服电机4、气浮矩形导轨5、连接块7、耦合连杆8、固定块12、十字轴滑块13及气浮台单体14,在平台2的四角均设有气浮台单体14,四个气浮台单体14等高设置,该四个气浮台单体14的上表面共面,形成一个水平基准面,作为测量工作基准面。平台2相邻两角分别设有安装于平台2上的伺服电机4,另外相邻两角分别安装有固定块12,两个伺服电机4输出的直线运动方向正交垂直。每个伺服电机4的输出端均设有气浮矩形导轨5,该气浮矩形导轨5的一端与伺服电机4的输出端直连,另一端与一个气浮台单体14连接,两个气浮矩形导轨5均通过气管连接气源,另外两个气浮台单体14通过十字轴滑块13与两个固定块12连接。与气浮矩形导轨5连接的气浮台单体14上安装有导轨滑块6,气浮矩形导轨5输出端平面垂直方向与该导轨滑块6正交连接,形成平面X、Y方向导向结构,导轨滑块6限制正交平移距离。本实施例的气浮矩形导轨5为市购产品,购置于天津中精微仪器设备有限公司,型号为DG-AB-L100;导轨滑块6为市购产品,购置于台湾上银HIWIN科技股份有限公司,型号为SXR-33-160。本实施例的气浮矩形导轨5与伺服电机4直连,气浮矩形导轨5具备高刚度、高扭转刚度、高承载能力,中心空心可以安装丝杠螺母,便于伺服电机4驱动气浮矩形导轨5做直线方向运动。每个气浮台单体14的两侧对称安装有连接块7,形成一个整体,相邻两气浮台单体14之间设有耦合连杆8,每个耦合连杆8的两端分别与相邻两气浮台单体14上的连接块7相连接。
如图1、图3A、图4A及图4B所示,耦合连杆8的一端与所连接的连接块7之间设有关节轴承9及芯轴10,该关节轴承9的一端与耦合连杆8的一端相连,另一端开设有球头铰接孔,芯轴10的一端安装于球头铰接孔内,另一端与连接块7相连。本实施例的耦合连杆8为空心结构,减轻重量,两端均加工有外螺纹,两端的外螺纹分别与两个关节轴承9的一端的内螺纹配合安装。在芯轴10外套设有垫筒11,该垫筒11位于关节轴承9与连接块7之间。芯轴10和耦合连杆8之间通过关节轴承9形成铰接结构,提供一个旋转自由度,以便用于整个联动耦合气浮基座3的结构安装于拆卸,结构简单可靠。本实施例的关节轴承9为市购产品,购置于韩国YHB株式会社,型号为YTP LMUW-16。
如图1及图5所示,两个固定块12和两个气浮台单体14之间安装了十字轴滑块13,固定块12属于固定零件,气浮台单体14属于运动零件,而十字轴滑块13则限制了气浮台单体14只能沿着平面X、Y方向运动。本实施例的十字轴滑块13为市购产品,购置于天津中精微仪器设备有限公司,型号为DG-HK-16-100。
本发明的工作原理为:
在调心装置工作时,分别沿与工件圆心轴线正交且相互垂直的两个方向上移动工件,直到测量变化量达到最小,此时可以认为工件中心达到重合。利用逼近式圆心定位方法,可以快速精确定位大型圆形工件的圆心的相对坐标,从而指导后续测量。具体为:
如图3C及图6所示,图3C中下部两个伺服电机4、两个气浮矩形导轨5驱动两个气浮台单体14为主的组合体沿X、Y方向正交运动,由于耦合连杆8的连接,四个气浮台单体14一起运动;如图2A所示,伺服电机4与固定块12固定安装在平台2平面上的四角,在十字轴滑块13以及气浮矩形导轨5结合导轨滑块6而组成的十字滑块结构的限制下,整个联动耦合气浮基座3只能在如图2A所示平面X、Y两个方向正交运动;例如,左下角伺服电机4单独驱动,联动耦合气浮基座3只能在X方向上运动,右下角伺服电机4单独驱动,联动耦合气浮基座3只能在Y方向上运动,当两个伺服电机4同时驱动时,联动耦合气浮基座3可以沿平台2平面X、Y方向同时运动,X、Y方向互相垂直,所以称作正交运动。当然,X、Y方向就是平面坐标系,而联动耦合气浮基座3运动的轨迹都可以通过X、Y方向变化的坐标点计算出来,这就可以实现去除工件偏心量的目的,也就是实现调心功能。
本发明独特之处在于通过采用耦合连杆8把四个等高气浮台单体14连接在一起,耦合联动,与平台2接触面形成联动耦合气浮基座3,利用真空载荷空气轴承原理,气膜压力支撑气垫具有向上支撑力,同时真空腔吸引气垫向下形成预载荷,使得气垫承载刚度大而且稳定。大型工件在联动耦合气浮基座3上面相当于漂浮状态,仅仅十字轴滑块13和导轨滑块6导向时产生极小摩擦力,伺服电机4非常容易驱动,结构简单可靠,精度高,调心效率高。
本发明的大型圆柱度仪气浮自动调心装置能够承载最大3吨重量、最大直径尺寸2.5米的圆形工件,对于提高大型圆环、圆柱等回转体工件圆度、圆柱度、同轴度等形位误差测量的关键测量精度和测量效率,圆心的精确定位至关重要。
- 一种大型圆柱度仪气浮自动调心装置
- 一种大型圆柱度仪气浮自动调心装置