一种麻醉助推仪控制方法和麻醉助推仪
文献发布时间:2023-06-19 10:00:31
技术领域
本发明涉及牙科医疗器械领域,具体而言,涉及一种麻醉助推仪控制方法和麻醉助推仪。
背景技术
在牙科各种手术中,常常需要局部麻醉或者神经阻滞麻醉,以减轻患者在手术中的疼痛感和提高手术的成功率。
目前医生常用的口腔麻醉注射方法为手动注入,将麻醉剂放入到手动注射器中,再靠手用力推压使药物注入到病人口腔组织中。医生往往需要依靠经验来针对不同患者和不同的注入组织来调节注射速度、注射压力和注射用量。这对于年轻的新医生很难掌控,而且为了减少麻药的用量,需要对单颗牙进行牙周膜麻醉,这时需要很大的注射压力,手动很难完成。而在采用麻醉助推仪进行药物注射的过程中,需要根据电机的电流计算出麻醉助推仪承受的压力,并判断正在注射的组织,这种方法准确度不高,容易产生误差,并且注射步骤繁琐,注射效率低,增加了患者的痛感。
发明内容
本发明的目的包括,提供了一种麻醉助推仪控制方法和麻醉助推仪,其能够提高注射的效率,提高注射量的精确度,并减轻患者的痛感。
本发明的实施例可以这样实现:
第一方面,本发明提供一种麻醉助推仪控制方法,麻醉助推仪包括电机、推杆、压力传感器以及针头,电机用于驱动推杆运动,以在针头插入口腔组织时,将麻醉助推仪中的麻药筒中内的麻药经针头推送至口腔组织,麻醉助推仪控制方法包括:
获取针头插入口腔组织时压力传感器输出的检测信号,得到针头插入口腔组织时的阻力数据;
获取电机的工作参数;
将阻力数据及工作参数代入预设规则,得到电机的预设转速;
控制电机按预设转速转动。
在可选的实施方式中,工作参数为电机的工作电流。
在可选的实施方式中,在控制电机按预设转速转动的步骤后,麻醉助推仪控制方法还包括:
计算电机按预设转速转动的转动时间;
获取位置传感器输出的检测推杆位置的位置信号,得到推杆的实际行程;
根据转动时间及实际行程得到电机的实际转速,将预设转速与实际转速进行对比,若预设转速与实际转速不一致,则调整电机的转动速度,直至预设转速与实际转速一致。
在可选的实施方式中,在控制电机按预设转速转动的步骤后,麻醉助推仪控制方法还包括:
获取位置传感器输出的检测推杆位置的位置信号,得到推杆的实际行程;
根据推杆的实际行程得到麻药的注入量,以及麻药筒中的麻药余量;
当麻药余量小于预设余量时,发出信号。
第二方面,本发明提供一种麻醉助推仪,麻醉助推仪包括壳体、电机、推进结构、压力传感器以及用于执行上述的麻醉助推仪控制方法的控制器;
电机及推进结构均容置于壳体内,且壳体具备安装麻药筒的安装腔,以及与安装腔连通并用于安装针头的针孔;
电机与壳体连接,推进结构包括容置于壳体内的螺母、丝杆及推杆,丝杆与电机连接,螺母与丝杆配合并与推杆连接;
电机用于驱动丝杆转动,并带动螺母及推杆相对于安装腔滑动,以与位于安装腔内的麻药筒抵接并推送麻药筒中的麻药;
压力传感器用于检测针头插入口腔组织时的阻力数据;
控制器与传感器及电机电连接。
在可选的实施方式中,压力传感器位电机与推进结构的连接处。
在可选的实施方式中,压力传感器位于推杆与螺母的连接处或位于针头与麻药筒的连接处。
在可选的实施方式中,麻醉助推仪还包括与螺母连接的导向块以及开设于壳体内壁的导向槽,导向槽的延伸方向与丝杆的轴线方向重合;导向块与导向槽配合。
在可选的实施方式中,推杆用于与麻药筒抵接的一端设置有与麻药筒的筒内壁贴合的环形密封圈。
在可选的实施方式中,麻醉助推仪还包括位置传感器,位置传感器与控制器电连接,位置传感器与壳体连接,并用于检测推杆在壳体中的位置。
本发明实施例的有益效果包括:
该麻醉助推仪控制方法通过获取针头插入口腔组织时压力传感器输出的检测信号,得到针头插入口腔组织时的阻力数据;获取电机的工作参数;将阻力数据及工作参数代入预设规则,得到电机的预设转速;控制电机按预设转速转动。从而能够在使用的过程中,能够根据针头插入的口腔组织,自动调整电机的转速,从而根据口腔组织的不同对麻醉助推仪的注射速度、注射压力和注射用量进行调整,进而提高注射的效率,并降低注射误差,降低注射过程中患者的痛感。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
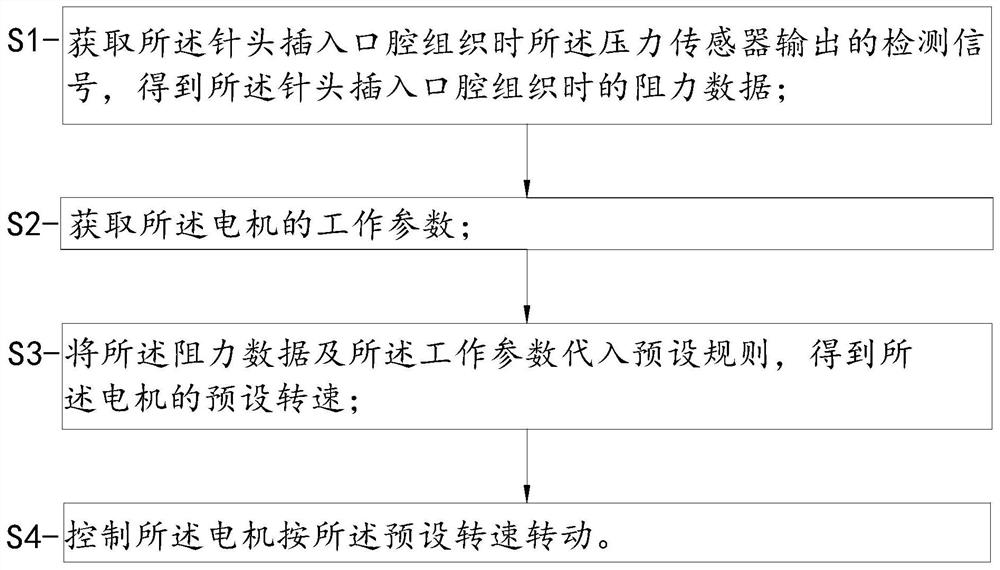
图1为本发明实施例中麻醉助推仪控制方法的步骤图;
图2为本发明实施例中麻醉助推仪的结构示意图;
图3为本发明实施例中麻醉助推仪的分解示意图;
图4为本发明实施例中推进结构的结构示意图;
图5为本发明实施例中推进结构的剖视图。
图标:10-针头;20-麻药筒;200-麻醉助推仪;210-壳体;220-电机;230-推进结构;240-压力传感器;250-控制器;231-螺母;232-丝杆;233-推杆;251-导向块;252-导向槽;234-环形密封圈;260-位置传感器;235-安装孔。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
在本发明的描述中,需要说明的是,若出现术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,若出现术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
需要说明的是,在不冲突的情况下,本发明的实施例中的特征可以相互结合。
请参考图1-图4,图1为本发明实施例中麻醉助推仪控制方法的步骤图,图2-图4为本发明实施例中麻醉助推仪的结构示意图,本实施例提供了一种麻醉助推仪控制方法,麻醉助推仪200包括电机220、推杆233、压力传感器240以及针头10,电机220用于驱动推杆233运动,以在针头10插入口腔组织时,将安装在麻醉助推仪200上的麻药筒20内的麻药经针头10推送至口腔组织,该麻醉助推仪控制方法包括以下步骤:
S1:获取针头10插入口腔组织时压力传感器240输出的检测信号,得到针头10插入口腔组织时的阻力数据;
S2:获取电机220的工作参数;
S3:将阻力数据及工作参数代入预设规则,得到电机220的预设转速;
S4:控制电机220按预设转速转动。
该麻醉助推仪控制方法的原理是:
该麻醉助推仪控制方法的目的是根据针头10插入的空腔组织的不同,对麻醉助推仪200的注射速度、注射压力和注射用量进行调整,从而使得麻醉助推仪200在使用的过程中,能够根据空腔组织的不同自动调整注射速度、注射压力和注射用量,提高麻醉助推仪200的工作效率,并减轻患者的痛感。
具体的,该麻醉助推仪控制方法包括以下步骤:
通过获取针头10插入口腔组织时压力传感器240输出的检测信号,得到针头10插入口腔组织时的阻力数据;获取电机220的工作参数;将阻力数据及工作参数代入预设规则,得到电机220的预设转速;控制电机220按预设转速转动。从而能够在使用的过程中,能够根据针头10插入的口腔组织,自动调整电机220的转速,从而根据口腔组织的不同对麻醉助推仪200的注射速度、注射压力和注射用量进行调整,进而提高注射的效率,并降低注射误差,降低注射过程中患者的痛感。
需要说明的是,由于在麻醉助推仪200在使用的过程中,会插入不同的口腔组织中,由此,随着针头10的位置变化,故不同的口腔组织施加至麻醉助推仪200的阻力同样也会发生变化,即,通过获取针头10插入口腔组织时压力传感器240输出的检测信号,得到的针头10插入口腔组织时的阻力数据也会发生变化,由此,使得麻醉助推仪200在使用的过程中,需要实时监测阻力数据,在阻力数据发生变化时,其预设转速也会根据口腔组织的变化而变化,从而能够通过这样的方式自动的调整麻醉助推仪200的注射速度、注射压力和注射用量,以使得麻醉助推仪200的注射速度、注射压力和注射用量能够适应口腔组织,从而能够减轻患者的痛感。
进一步地,在本实施例中,为基于阻力数据及工作参数得到电机220的预设转速,可以采用预设规则:
需要说明的是,在获取电机220的工作参数时,电机220的工作参数可以为电机220的工作电流。并且,在本发明的其他实施例中,还可以采用电机220的其他参数,并对上述公式进行相应的变形,以得到相应的转换公式。
进一步地,在本实施例中,为对麻醉助推仪200工作过程中的注射速度、注射压力和注射用量等参数进行校准,故需要对电机220的转速进行校准,在此过程中,需要在针头10插入口腔组织后,即在控制电机220按预设转速转动的步骤后,计算电机220按预设转速转动的转动时间;
获取位置传感器260输出的检测推杆233位置的位置信号,得到推杆233的实际行程;
根据转动时间及实际行程得到电机220的实际转速,将预设转速与实际转速进行对比,若预设转速与实际转速不一致,则调整电机220的转动速度,直至预设转速与实际转速一致。
即,在该麻醉助推仪控制方法控制麻醉助推仪200的针头10插入口腔组织并开始注射麻药后,需要对电机220的实际转动速度与麻醉助推仪控制方法计算的预设转速进行对比,从而确保麻醉助推仪200的实际工作状态与麻醉助推仪控制方法所要实现的状态一致,基于此,本实施例采用的是,根据转动时间及实际行程得到电机220的实际转速,将预设转速与实际转速进行对比,若预设转速与实际转速不一致,则调整电机220的转动速度,直至预设转速与实际转速一致。
需要说明的是,由于麻醉助推仪200在工作的过程中,需要插入不同的口腔组织,故其预设转速与实际转速均会发生变化,由此,需要对电机220的实际转速与预设转速进行实时对比,以确保麻醉助推仪200的实际工作状态与麻醉助推仪控制方法所要实现的状态一致。
进一步地,在本实施例中,在注入麻药的过程中,由于麻药筒20中的麻药量为定值,为对使用者起到提示的作用,故,该麻醉助推仪控制方法还需要对麻药筒20中的麻药余量进行监控,具体的:
在控制电机220按预设转速转动的步骤后,麻醉助推仪控制方法还包括:
获取位置传感器260输出的检测推杆233位置的位置信号,得到推杆233的实际行程;
根据推杆233的实际行程得到麻药的注入量,以及麻药筒20中的麻药余量;
当麻药余量小于预设余量时,发出信号。
由此,通过对推杆233位置的检测,便可对麻药的累积推送量进行统计,从而能够计算出麻药筒20中的麻药余量,并能够在麻药余量小于预设余量时,发出信号,从而能够方便使用。
请参考图2-图5,图2及图3为本发明实施例中麻醉助推仪的结构示意图,图4及图5为本发明实施例中推进结构的结构示意图,本发明还提供一种麻醉助推仪200,麻醉助推仪200包括壳体210、电机220、推进结构230、压力传感器240以及用于执行上述的麻醉助推仪控制方法的控制器250;
其中,电机220为无刷电机220,电机220及推进结构230均容置于壳体210内,且壳体210具备安装麻药筒20的安装腔,以及与安装腔连通并用于安装针头10的针孔;
电机220与壳体210连接,推进结构230包括容置于壳体210内的螺母231、丝杆232及推杆233,丝杆232与电机220连接,螺母231与丝杆232配合并与推杆233连接;
电机220用于驱动丝杆232转动,并带动螺母231及推杆233相对于安装腔滑动,以与位于安装腔内的麻药筒20抵接并推送麻药筒20中的麻药;
压力传感器240用于检测针头10插入口腔组织时的阻力数据;
控制器250与传感器及电机220电连接。
该麻醉助推仪200的工作原理是:
该麻醉助推仪200在使用的过程中,通过电机220的转动能够驱动推进结构230运动,进而通过推进结构230将该麻醉助推仪200中的麻药筒20中的麻药推送至口腔组织。具体的,电机220及推进结构230均容置于壳体210内,且均与壳体210连接。而壳体210具备安装麻药筒20的安装腔,以及与安装腔连通并用于安装针头10的针孔,在使用的过程中,针头10与安装于安装腔中麻药筒20连接并连通。
推进结构230包括容置于壳体210内的螺母231、丝杆232及推杆233,丝杆232与电机220连接,螺母231与丝杆232配合并与推杆233连接;其中,电机220用于驱动丝杆232转动,并带动螺母231及推杆233相对于安装腔滑动,以与位于安装腔内的麻药筒20抵接并推送麻药筒20中的麻药。
而压力传感器240用于检测针头10插入口腔组织时的阻力数据,并将表征阻力数据的信号传递至控制器250中;控制器250用于获取针头10插入口腔组织时压力传感器240输出的检测信号,得到针头10插入口腔组织时的阻力数据;控制器250用于获取电机220的工作参数;控制器250用于将阻力数据及工作参数代入预设规则,得到电机220的预设转速;控制器250用于控制电机220按预设转速转动。
由此,该麻醉助推仪200能够在使用的过程中,根据针头10插入的口腔组织,自动调整电机220的转速,从而根据口腔组织的不同对麻醉助推仪200的注射速度、注射压力和注射用量进行调整,进而提高注射的效率,并降低注射误差,降低注射过程中患者的痛感。
需要说明的是,由于在麻醉助推仪200在使用的过程中,会插入不同的口腔组织中,由此,随着针头10的位置变化,故不同的口腔组织施加至麻醉助推仪200的阻力同样也会发生变化,即,通过获取针头10插入口腔组织时压力传感器240输出的检测信号,得到的针头10插入口腔组织时的阻力数据也会发生变化,由此,使得麻醉助推仪200在使用的过程中,通过压力传感器240实时监测阻力数据,在控制器250接收到的阻力数据发生变化时,其预设转速也会根据口腔组织的变化而变化,从而能够通过这样的方式自动的调整麻醉助推仪200的注射速度、注射压力和注射用量,以使得麻醉助推仪200的注射速度、注射压力和注射用量能够适应口腔组织,从而能够减轻患者的痛感。
请参考图2-图5,在本实施例中,在设置推杆233时,沿丝杆232的轴线方向,推杆233开设有容置丝杆232的安装孔235,即,推杆233套设于丝杆232外,从而有利于减小推进结构230及麻醉助推仪200的体积。
进一步地,在本实施例中,麻醉助推仪200的针头10在外力的作用下插入口腔组织时,麻醉助推仪200会受到一定的阻力,而不同的口腔组织的阻力不同,即,能够通过阻力识别出不同的口腔组织,以便于对注射速度、注射压力和注射用量进行调整,从而适应不同的口腔组织,基于此,为对获取针头10插入口腔组织时的阻力数据,故在设置压力传感器240时,压力传感器240位于推杆233与螺母231的连接处。而在本实施例的其他实施例中,压力传感器240还可以位于针头10与麻药筒20的连接处或位于电机220与推进结构230的连接处。
请参考图2-图5,在本实施例中,在推送麻药时,采用的是电机220驱动丝杆232转动,而丝杆232的转动带动螺母231在壳体210内滑动,从而驱动推杆233滑动,在此过程中,为避免丝杆232转动的过程中螺母231与丝杆232同步转动,故麻醉助推仪200还包括与螺母231连接的导向块251以及开设于壳体210内壁的导向槽252,导向槽252的延伸方向与丝杆232的轴线方向重合;导向块251与导向槽252配合,从而对螺母231起到限制作用,以使得螺母231与丝杆232的配合,能够将丝杆232的转动转换为螺母231的滑动,从而能够推动推杆233滑动。在设置导向槽252时,沿丝杆232的轴线方向,螺母231相对于安装腔滑动的最大距离,小于导向槽252长度,以避免导向槽252影响螺母231沿丝杆232的轴线方向的滑动。
请参考图5,在设置推杆233时,为推送麻药筒20中的麻药,故推杆233的一端需要伸入麻药筒20,并且为在推杆233回吸的过程中,形成负压将麻药筒20的活塞回拉,从注射所在人体位置回吸组织液或者血液,表明针头10的注射位置是否位于血管,故推杆233用于与麻药筒20抵接的一端设置有与麻药筒20的筒内壁贴合的环形密封圈234。
在本实施例中,麻醉助推仪200还包括位置传感器260,位置传感器260与控制器250电连接,位置传感器260与壳体210连接,并用于检测推杆233在壳体210中的位置,从而通过对推杆233位置的检测,便可对麻药的累积推送量进行统计,从而能够计算出麻药筒20中的麻药余量,并能够在麻药余量小于预设余量时,发出信号,从而能够方便使用。另外,为便于观察安装腔中的麻药筒20的麻药余量,故形成安装腔的壳体210开设有与外界连通的观察口。
以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
- 一种麻醉助推仪控制方法和麻醉助推仪
- 基于动态压力检测的口腔麻醉助推仪注射速度控制方法及系统