一种面向洪涝灾害应急快拼图制作的无人机影像姿态恢复方法
文献发布时间:2023-06-19 10:02:03
技术领域
本发明属于面向洪涝灾害应急的航空摄影测量领域,涉及一种面向洪涝灾害应急快拼图制作的无人机影像姿态恢复方法,其中基于连续时间连续内插的全影像姿态恢复是本方法的关键技术。
背景技术
中国是一个地质灾害繁多且频发的国家,每年因此造成的直接损失达到数十亿元,更给灾害区域的人民安全带来了极大的威胁。而在灾害发生后,快速、准确地获受灾区域全局情况,掌握灾害分布是进行灾害应急指挥与救援的关键。近年,由于具备灵活机动、成本低、不受时间空间限制、搭载的全球导航卫星系统(GNSS)接收机定位精度高和姿态稳定的特点,无人机遥感平台(UAV)摄影测量特别是无人机摄影测量技术逐渐在地质灾害调查与应急中得到应用与推广,其快拼图成果也成为灾害应急救援的最重要的精细数据来源之一。
然而在洪涝灾害应急中,大面积水域范围内的影像重叠区域的连接点几乎难以获取,导致全部影像进行空中三角测量(空三)作业时出现大范围弱连接甚至无连接区域,使得整个受灾区域的无人机影像被动分为若干不连续的覆盖较大面积陆地的子空三区。这无疑使得水淹区域内的影像的姿态无法恢复,降低灾区快拼图数据的完整性,形成灾害盲区,增加应急救灾的不确定性。因此,进行无人机数据的全影像姿态恢复和完整快拼图生成是目前洪涝应急救灾的必然要求。
目前,已有的摄影测量软件与方法都只能处理含有较少水域(单张影像不全是水域)的陆地,并不能完全适用于又大范围水域的洪涝灾害区域的无人机数据处理。因此在洪涝灾害数据处理时,已有的处理流程都先针对受灾区域进行子区(一般每个子区都是独立的未被水淹的区域)划分,然后分别进行无人机数据采集和空三姿态恢复处理,最后形成多个子快拼图。这种处理流程无法获取水淹区域的快拼结果,降低了快拼图的完整性和可应用性,增加了应急决策的不确定性。
发明内容
本发明主要针对无人机摄影测量技术在洪涝灾害应急中快拼图获取的不足,提出了一种面向洪涝灾害应急快拼图制作的无人机影像姿态恢复方法。本方法利用无人机姿态稳定和连续拍摄的特性,根据非淹水区域空三结果,通过内插获得淹水区域的影像的精度较高的姿态参数,并最终获取受灾区域完整的快拼图。
为了获得洪涝灾害区域的完整快拼图,本发明提出基于时间连续内插的全影像姿态恢复方法。其核心思想是利用GNSS定位信息,将所有影像先按非水淹地表进行分区并分别进行空三解算,然后利用影像连续采集的特性,对未参与解算的水淹区域影像进行姿态内插,从而得到所有影像的完整姿态参数。本方法利用无人机姿态稳定和连续拍摄的特性,通过内插获得淹水区域的影像的较高精度姿态参数,从而最终获取受灾区域完整的快拼图,有效弥补无人机摄影测量技术在洪涝灾害应急中的不足。
本发明的上述技术问题主要是通过下述技术方案得以解决:
本方法用于洪涝灾害应急时的无人机影像快拼图制作,包含灾区完整数据采集、子区划分及空三、水淹影像姿态内插以及快拼图生成四个主要的部分,其具体实施步骤如下:
步骤1:根据受灾情况选择合适的带有高精度的GNSS接收机的无人机。
步骤2:利用选定无人机对灾区进行完整航拍,要求航拍范围的起点位置和终止位置处都有至少有N
步骤3:将所有影像按照GNSS位置进行排列,利用DPGrid等软件进行人工划分包含非水淹区域的独立空三子区。为解算稳定,每个子区至少应该包含N
步骤4:利用DPGrid等软件对各子区进行空三解算,得到参与计算的影像的姿态参数。需要注意的是,因为所有影像由同一架无人机获取,且各影像曝光时刻的飞行高度等信息基本一致,所以解算时应保持所有子区的影像的焦距、像主点和畸变参数一致。具体可首先选择一个影像数量最多的子区进行参数解算,并将计算得到的相机焦距、像主点和畸变参数作为剩余子区的固定输入参数,再进行这些子区的空三解算处理。
步骤5:将姿态参数成功解算出来的影像标记为Known,将未成功解算的影像以及未参与计算的水淹区域影像标记为UnKnown。并所有影像按照生成时间进行排序。
步骤6:如式(1)所示,对标记为UnKnown的影像进行姿态参数内插。并将标记为Known的影像的焦距、像主点和畸变参数拷贝给标记为UnKnown的影像。
式中,Atti表示姿态参数(航向角、俯仰角、横滚角),
步骤7:待所有影像的姿态参数计算出来后,设置地面高程,对所有影像进行几何纠正,生成完整快拼图。
与现有技术相比,本发明的优点和有益效果:
现有技术对于淹水区域影像无法自动处理,必须全人工完成落水区域影像的修补,不仅费时费力,处理结果也没有精度保障。本发明充分利用影像连续获取的特性,可全自动恢复淹水区域影像的姿态参数,从而使得淹水区域影像也能有效参与快拼图的自动处理,保障了水灾区域应急影像图的快速全自动生产,有效弥补现有摄影测量技术在洪涝灾害应急中的不足。
附图说明
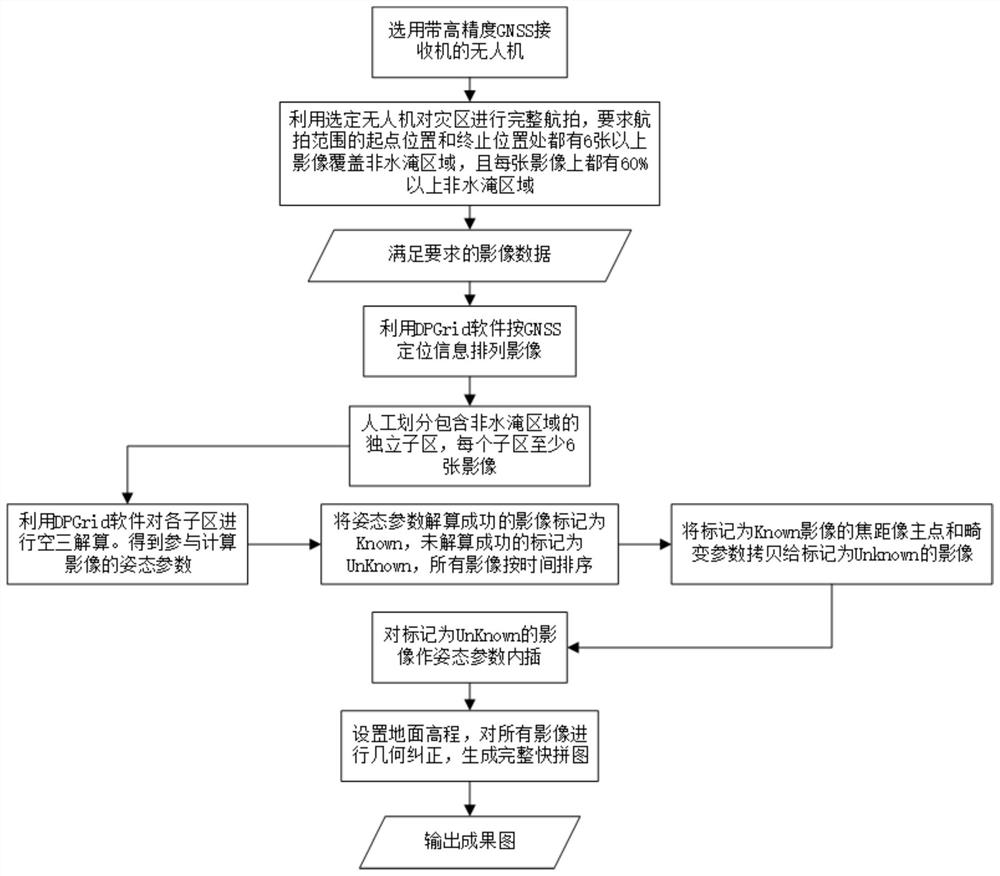
图1为本发明实施例的总体流程图;
图2为本发明对鄱阳湖水淹区域数据的gps位置显示图;
图3为本发明对鄱阳湖水淹区域的处理结果图;
图4为本发明对鄱阳湖受灾区域处理结果图。
具体实施方式
以下结合附图和实施例详细说明本发明的技术方案。
本发明提供的技术方案是,一种面向洪涝灾害应急快拼图制作的无人机影像姿态恢复方法,其中基于连续时间连续内插的全影像姿态恢复是本发明的关键技术。
步骤1:选择合适的带有高精度的GNSS接收机和相机的测绘级无人机。
步骤2:利用选定无人机对灾区进行完整航拍飞行,要求航拍范围的起点位置和终止位置处至少包含N张影像覆盖非水淹区域,这些张影像内部均有60%以上非水淹区;为解算稳定,一般N大于6。
步骤3:将所有影像按照GNSS位置进行排列,利用DPGrid或者其他空三软件人工划分包含非水淹区域的独立空三子区。每个子区至少应该包含6张影像。
步骤4:利用DPGrid等软件对各子区进行空三解算,得到参与计算的影像的姿态参数。解算时应确认配置所有影像的焦距、像主点和畸变参数一致。具体可首先选择影像数量最多的子区进行参数解算,并将计算得到的相机焦距、像主点和畸变参数作为剩余影像的固定输入参数,再进行这些子区的空三解算处理。
步骤5:将姿态参数成功解算出来的影像标记为Known,将未成功解算的影像以及未参与计算的水淹区域影像标记为UnKnown。并所有影像按照生成时间进行排序。
步骤6:如式(1)所示,对标记为UnKnown的影像进行姿态参数内插。并将标记为Known的影像的焦距、像主点和畸变参数拷贝给标记为UnKnown的影像。
式中,Atti表示姿态参数(航向角、俯仰角、横滚角),
步骤7:待所有影像的姿态参数解算完毕,设置地面高程,对所有影像进行几何纠正,生成完整快拼图。
步骤8:输出成果。
下面结合附图说明本发明的技术效果,其中图2为本发明对鄱阳湖水淹区域数据的gps位置显示图;经过以上步骤处理之后,图3为本发明对鄱阳湖水淹区域的处理结果图,即水域快拼图。图4为本发明在2020年7月鄱阳湖特大洪水灾害中实施应用处理结果图,本技术在2020年7月的抗洪救灾中发挥了重要作用,得到国家水利部、江西省水利厅以及江西省应急救灾部门的一致肯定。
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
- 一种面向洪涝灾害应急快拼图制作的无人机影像姿态恢复方法
- 一种面向洪涝灾害应急快拼图制作的无人机影像姿态恢复方法