一种病虫害监测及管控系统
文献发布时间:2023-06-19 10:21:15
技术领域
本发明涉及虫情监测领域,具体涉及一种病虫害监测及管控系统。
背景技术
虫情监测系统可以帮助农业种植户远程智能化自动化采集虫情信息,通过数据分析,确定病虫害的发生期、发生量,给种植户提供科学用药的数据依据,从而降低农药的使用,提高农作物的品质。
慢慢被淘汰的害虫监测方法是通过手眼观察统计,费时费力,难以满足监测预报以及生产实际需求,虫情监测系统是一种现代化害虫自动测报系统,利用现代光、电、数控技术、无线传输技术、物联网技术,结合实践经验和历史资料,对病虫害未来发生趋势作出预测,不仅提高劳动效率,监测结果准确性也大大提高,为广大科研人员和种植户提供准确、及时的预报服务。
现有的虫情监测为了统计害虫数量,在诱捕器的害虫通路上布置红外光栅传感器,或者使用光电计数器,或者监测高压电网电流波动等来获取诱捕害虫数量/频次。但是对于上述设计来说,整体结构相对比较复杂,红外光栅使用多个(5~8对)对射红外光耦,平行布置的密集光路容易被昆虫尸体堵塞造成失效。光电计数器有类似问题,且对于昆虫反向逃逸难以判断。而使用高压电网有一定的危险性,且耗电较大,难以小型化。
发明内容
本发明要解决的技术问题是提供一种病虫害监测及管控系统,结构简单,耗能低,使用便捷,适合大批量部署。
为了解决上述技术问题,本发明提供了一种病虫害监测及管控系统,包括反漏斗罩,所述反漏斗罩上设置有外筒体,所述反漏斗罩外表面与外筒体内壁配合形成诱捕空间,所述外筒体表面设置有深色吸光层,所述反漏斗罩顶部的漏斗口与诱捕空间贯通连接,所述反漏斗罩内设置有诱芯盒,所述诱芯盒内设置有诱芯,所述诱芯盒与升降装置连接,所述升降装置能够带动诱芯盒在反漏斗罩内部和反漏斗罩外部之间往复运动,所述反漏斗罩顶部的漏斗口上还设置有用于探测的红外传感器模组,所述红外传感器模组能够发射红外光并接收反射的红外光。
进一步的,所述升降装置包括杠杆柱,所述诱芯盒固定在杠杆柱中部,所述杠杆柱一端穿过反漏斗罩上开设的过孔与连杆一端连接,所述连杆另一端与旋臂连接,所述旋臂与固定在反漏斗罩上的升降电机连接,所述过孔对应的杠杆柱上还设置有限位部,所述限位部限制杠杆轴向的移动量;
所述诱芯盒一侧的杠杆柱上设置有盒盖,所述盒盖一侧与杠杆柱轴连设置,所述盒盖的轴连位置位于诱芯盒与过孔之间。
进一步的,所述旋臂的转动路径上设置有两个限位柱,所述两个限位柱配合限制旋臂的旋转角度。
进一步的,所述红外传感器模组包括多层支架,所述多层支架顶部设置有第一红外发射LED,所述多层支架底部安装在反漏斗罩顶部的漏斗口上,所述多层支架底部至顶部之间的部位上设置有第一层红外接收管和第二层红外接收管,所述第一红外发射LED朝向漏斗口轴向发射红外光,所述第一层红外接收管用于接收漏斗口内反射的红外光,所述第二层红外接收管用于接收漏斗口上部反射的红外光。
进一步的,所述多层支架包括环形底座,所述环形底座上设置有三个支柱,三个支柱顶部通过三叉板固定,所述三叉板与环形底座同心设置,所述第一红外发射LED安装在三叉板中心,所述第一层红外接收管和第二层红外接收管的数量均为3个且分布安装在三个支柱上。
进一步的,所述红外传感器模组包括第一安装套,所述第一安装套上设置有延展板,所述延展板上安装有第二红外发射LED,所述第二红外发射LED与反漏斗罩同轴设置,所述第一安装套表面还设置接收安装架,所述接收安装架上设置有第二红外接收管,所述第二红外接收管前端垂直安装有第一柱镜,所述第二红外接收管用于接收反漏斗罩内反射的红外光。
进一步的,所述红外传感器模组包括第二安装套,所述第二安装套上设置有收发安装架,所述收发安装架上安装有第三红外发射LED和第三红外接收管,所述第三红外发射LED设置在第三红外接收管上方,所述第三红外发射LED朝向漏斗口内壁发射红外光且漏斗口的内壁设置为光滑的平面,所述第三红外接收管用于接收反漏斗罩内反射的红外光,所述第三红外发射LED和第三红外接收管前端均垂直安装有第二柱镜。
进一步的,所述反漏斗罩与外筒体之间通过卡扣固定,所述外筒体上设置有太阳能板和天线,所述外筒体内设置有电子元器件组件和锂电池,所述外筒体外表面上还设置有支架抱箍。
进一步的,还包括实体打卡按键,在完成操作后需要触发实体打卡按键,作为维护工作被执行的凭证。
本发明的有益效果:
1、外筒体表面设置有深色吸光层,可以在日间吸收阳光对诱捕到的害虫烘干,节省烘干的电能,降低整体功耗,计数器耗电和红外传感器耗电轻微,可以使用小尺寸太阳能板和锂电池供电,无需外接线缆。
2、诱芯盒设计为可升降移动结构,避免其受日间烘干温度影响,能够大大延长诱芯有效成分的挥发寿命,减少了更换滤芯频率,提高使用便捷度。
3、反漏斗罩具有通道由大变小的特点,便于昆虫飞入但逃逸难,配合红外传感器模组,能够高精度的对捕捉的昆虫进行计数,精度高且耗能小,整体结构简单可靠。
附图说明
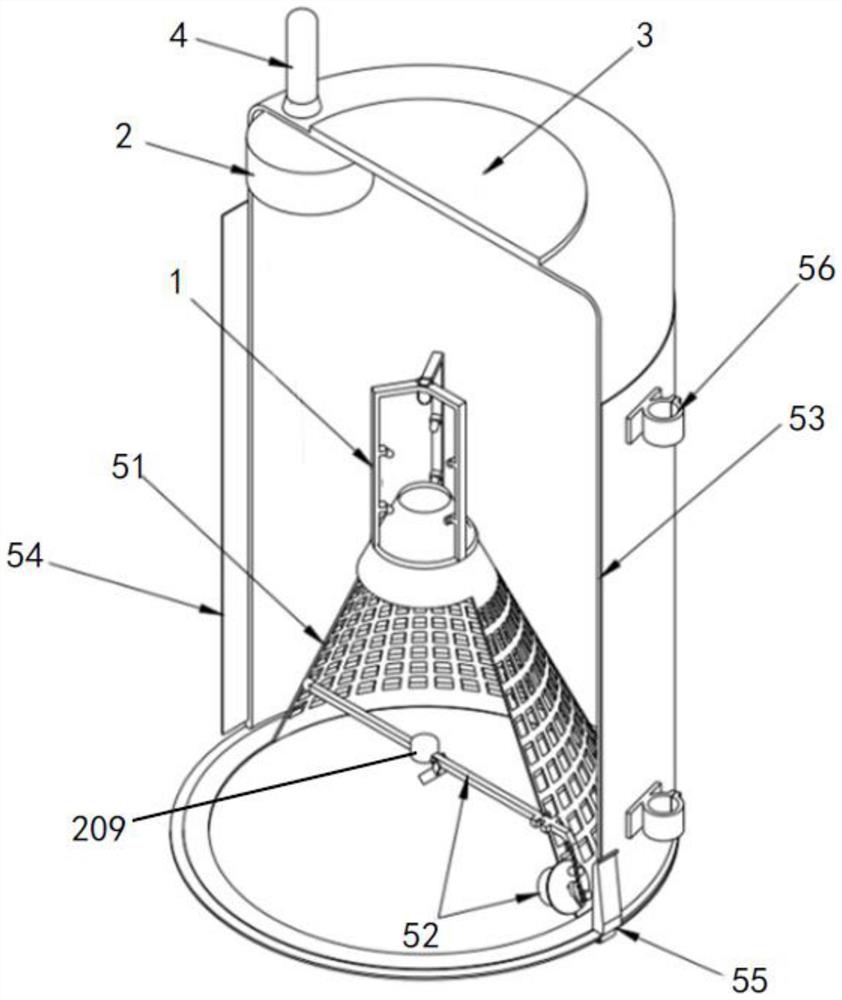
图1是本发明的整体结构示意图;
图2是本发明的计数电路原理框图;
图3是本发明的升降装置结构示意图;
图4是本发明的升降装置下降后的示意图;
图5是本发明方案A的红外传感器模组示意图;
图6是本发明图5中的光路示意图;
图7是本发明方案B的红外传感器模组示意图;
图8是本发明图7中的光路示意图;
图9是本发明方案C的红外传感器模组示意图;
图10是本发明的电路原理图;
图11是本发明使用时示波器信号图;
图12是本发明有较大昆虫经过的信号图;
图13是本发明的网络拓扑结构图;
图14是本发明的提醒功能实现流程图;
图15是本发明的维护流程图。
其中:
1、红外传感器模组;2、电子元器件组件;203、连杆;204、杠杆柱;205、限位部;206、盒盖;207、抵接头;208、限位柱;209、诱芯盒;210、过孔;3、太阳能板;4、天线;51、反漏斗罩;52、升降装置;53、外筒体;54、深色吸光层;55、卡扣;56、支架抱箍。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明,以使本领域的技术人员可以更好地理解本发明并能予以实施,但所举实施例不作为对本发明的限定。
参照图1所示,本发明的病虫害监测及管控系统的一实施例,包括反漏斗罩51,反漏斗罩上设置有外筒体53,反漏斗罩外表面与外筒体内壁配合形成诱捕空间,反漏斗罩顶部的漏斗口与诱捕空间贯通连接,通过反漏斗罩的漏斗口可以进入诱捕空间内,外筒体表面设置有深色吸光层54,在白天太阳照射下,能够聚热,从而使得诱捕空间升温,反漏斗罩内还设置有诱芯盒209,诱芯盒内设置有诱芯,诱芯根据引诱害虫种类不同可以任意更换,诱芯盒与升降装置52连接,升降装置能够带动诱芯盒在反漏斗罩内部和反漏斗罩外部之间往复运动,当诱捕空间升温后,热量会造成诱芯快速挥发,从而降低使用寿命,因此通过升降装置带着诱芯盒以及诱芯移动至反漏斗罩下方,脱离热量中心,以避免无效的挥发,反漏斗罩顶部的漏斗口上还设置有用于探测的红外传感器模组1,红外传感器模组能够发射红外光并接收反射的红外光,当害虫经过时,通过接收害虫表面对红外光的反射光,即触发红外传感器模组,电信号经逻辑判断确定为飞入即记录为一次捕获,红外传感器模组结构简单、布置便捷,且成本低。
还在反漏斗罩与外筒体之间通过卡扣55固定,外筒体上设置有太阳能板3和天线4,外筒体内设置有电子元器件组件2和锂电池,太阳能板对锂电池进行充电,提高续航能力,且无需外接电缆,锂电池为天线、电子元器件组件等供电,天线能够将计数等信息进行无线传输,在捕获后的捕获时间和数量经433MHz无线信号发射,并由部署在附近(可以为在视距1公里内)的网关转发给服务器记录和处理,每个无线网关支持多路输入,支持出厂前预绑定或者在实施现场通过系统终端绑定网关和装置,电子元器件组件进行运行处理,具体原理参照图2所示;外筒体外表面上还设置有支架抱箍56,便于安装。其中433MHz无线信号为可选的通讯方法之一,其他还有315MHz,Lora,Sub1G,蓝牙,Zigbee,NBIoT等可选的低功耗无线通讯方式。
上述结构配合形成诱捕器,蛾类害虫受诱捕器底部中央的性诱剂诱芯吸引,飞扑过程因惯性窜入反漏斗罩,受反漏斗罩侧壁约束,其飞行轨迹穿过顶部漏斗口进入诱捕器的诱捕空间内,因漏斗口很小且处于中央顶部,捕获的害虫难以逃逸,后续的日晒使得诱捕空间升温即可让害虫脱水死亡。害虫尸体存留在外筒体和反漏斗之间。积累较多虫尸后系统可以提示维护人员前往清理,可以卡扣将反漏斗罩和外筒体分离,分离后实施清理,操作便捷可靠,且提醒操作能够避免无效检查工作,提高使用效率。
具体的,参照图3所示,上述升降装置包括杠杆柱204,诱芯盒固定在杠杆柱中部,杠杆柱一端穿过反漏斗罩上开设的过孔210与连杆203一端连接,在杠杆柱的另一端上设置有抵接头207,连杆另一端与旋臂202连接,旋臂与固定在反漏斗罩上的升降电机201连接,过孔对应的杠杆柱上还设置有限位部205,限位部限制杠杆轴向的移动量;诱芯盒一侧的杠杆柱上设置有盒盖206,盒盖一侧与杠杆柱轴连设置,盒盖的轴连位置位于诱芯盒与过孔之间。
诱芯盒位于杠杆柱中央,且盒口朝下,诱芯盒内壁可以设置环型凹槽,能够卡住诱芯免于脱落,诱芯为弹性材质,塞在诱芯盒内。诱芯盒盖可以通过侧边设置的柄部和销钉固定在杠杆柱,并可以其为轴悬挂/旋转。杠杆柱在日间时,可以为下垂状态,其中升降电机旋转,使得旋臂向上,连杆松弛,以限位部和过孔位置形成杠杆运动,杠杆柱的抵接头下垂,即诱芯盒位置下降,限位部可以为H型结构且卡挂在过孔处,使杠杆柱不至于滑脱。受重力影响,在杠杆柱倾斜时,盒盖自然合拢,贴靠在倾斜的诱芯盒上起到关闭诱芯盒的效果,在日间避免挥发或者尽可能少的挥发,保证使用寿命;
到了夜间,参照图4所示,升降电机反向旋转,旋臂向下,连杆拉紧,带动杠杆柱以限位部和过孔位置继续做杠杆运动,直至杠杆柱的抵接头抵靠在反漏斗罩的内壁上限位止转,此时杠杆柱可以处于反漏斗罩内壁中段截面圆的直径位置,诱芯在圆心的位置,便于均匀扩散引诱,侧剖面上看,杠杆柱和反漏斗罩内壁构成稳定的等腰三角形结构,杠杆柱为水平状态。受重力影响,盒盖维持于下垂的姿态,故诱芯盒改变为水平状态时,与盒盖相对位置发生角度变化,使盒盖张开,释放诱芯信息素。诱芯升降电机旋转到限位后即可断电,无需保持电流,功耗小。此诱芯升降机构简单,运行可靠。因白天诱芯脱出在外,更换诱芯也比较方便。仅需掀开诱芯盖,从诱芯盒下方塞入诱芯即可。
为了保证升降精度,在旋臂的转动路径上设置有两个限位柱208,两个限位柱配合限制旋臂的旋转角度,保证升降位置的准确度。
其中,参照图5所示,上述的红外传感器模组包括多层支架A11,多层支架顶部设置有第一红外发射LED A12,多层支架底部安装在反漏斗罩顶部的漏斗口上,多层支架底部至顶部之间的部位上设置有第一层红外接收管A13和第二层红外接收管A14,第一红外发射LED朝向漏斗口轴向发射红外光,第一层红外接收管用于接收漏斗口内反射的红外光,第二层红外接收管用于接收漏斗口上部反射的红外光。
使用顶置设置的第一红红外发射LED和侧向布置的两层红外接收管配合监测时,昆虫飞入时依次触发第一层红外接收管和第二层红外接收管,逃逸时候触发次序反之,或者仅仅触发其中一层红外接收管。当然还可以设置更多层数的红外接收管;参照图6所示,第一红外发射LED的L12光束可以为顶角20°圆锥,第一层红外接收管A13和第二层红外接收管A14感光范围为视角20°的入射光L13/L4所构成的锥形区域,红外发射光束和接收感光范围重叠的区域为可探测区域。其中第一层红外接收管A13位于反漏斗开口边缘下,其观察范围恰巧在昆虫飞入诱捕器之前的位置,故诱捕器内的昆虫活动不会干扰此位置监测,而害虫飞扑诱芯时其飞行无法骤停,且大多数昆虫成虫的爬行能力较弱,所以飞虫不会停留在此漏斗口处堵塞入口或传感器,诱捕器将会主要依据此位置先触发第一层传感器A13,后触发第二层传感器A14,来统计触发次数,而利用第二层传感器A14统计诱捕器内昆虫的活跃程度,如有昆虫反向次序先触发第二层传感器A14后触发第一层传感器A13位置的传感器则判定为一次逃逸。此方案结构稍显复杂,适合诱捕目标较为活跃,易逃逸类型的害虫(因诱芯不同,所诱捕到的害虫种类是可控的)。
具体的,上述多层支架包括环形底座A15,环形底座上设置有三个支柱A16,三个支柱顶部通过三叉板A17固定,三叉板与环形底座同心设置,第一红外发射LED安装在三叉板中心,第一层红外接收管和第二层红外接收管的数量均为3个且分布安装在三个支柱上。上述设计方案能够保证昆虫具有足够的飞入空间,并且第一红外发射LED和红外接收管均能够均匀分布安装。
参照图7和图8所示,本申请的红外传感器模组还可以为:包括第一安装套B11,第一安装套上设置有延展板B112,延展板上安装有第二红外发射LED B12,第二红外发射LEDB12与反漏斗罩同轴设置,第一安装套表面还设置接收安装架,接收安装架上设置有第二红外接收管B13,第二红外接收管前端垂直安装有第一柱镜B15,该第一柱镜B15在垂直方向上对光线没有折射作用,有效接收视角20°,与红外元器件原本参数一致,第二红外接收管用于接收反漏斗罩内反射的红外光。第一安装套B11安装在反漏斗顶端,延展板内表面是反漏斗锥形内壁的延伸结构,可以将窜入的昆虫导向或弹入诱捕器,减少顶部第二红外发射LED对昆虫飞入的阻碍,并且形成易进难出的迷宫结构,起到阻碍昆虫反向逃逸的作用。第二红外接收管为侧向安装设置,且具有第一遮光罩结构B111,以控制接收光的范围。
使用顶置红外发射LED,和侧向布置的单层红外接收传感器,适合诱捕惰性高,不易逃逸类型的害虫。此设计结构简单,耐灰尘污染,成本也比较低。顶置红外发射LED的光束L12为顶角约40°圆锥(为此种红外发射元件本体特性,未额外添加透镜),略小于反漏斗圆锥顶角,而昆虫B17进入红外照明区域时,其体表的漫反射光线L13会进入第二红外接收管,受第一遮光罩结构所限制,反漏斗口边缘位置的昆虫B18为可探测区域的极限,诱捕器内部飞行昆虫B19的反光不会干扰第二红外接收管,此第一遮光罩结构可以遮挡漏斗口以上部位的昆虫反光,避免已经捕获的昆虫产生触发和误报。
参照图9所示,本申请的红外传感器模组还可以为:包括第二安装套C11,第二安装套上设置有收发安装架,两者可以为一体结构,收发安装架上安装有第三红外发射LED C12和第三红外接收管C13,第三红外发射LED设置在第三红外接收管上方,第三红外发射LED朝向漏斗口内壁发射红外光且漏斗口的内壁设置为光滑的平面,第三红外接收管用于接收反漏斗罩内反射的红外光,第三红外发射LED和第三红外接收管前端均垂直安装有第二柱镜C15,该第二柱镜C15在垂直方向上对光线没有折射作用,有效发射红外夹角为20°,接收视角也是20°,与红外元器件原本参数一致。第三红外发射LED和第三红外接收管均侧向布置,且第三红外接收管前端位置处设置有第二遮光罩结构C111,以控制接收光的范围。
在反漏斗罩侧向布置第三红外发射LED和第三红外接收管,使红外发射区和接收区叠加,对经此次飞入诱捕器的昆虫可以获得最佳的感测灵敏度。此方案适合体型小,诱捕后惰性高,不易逃逸类型的害虫。此方案的优点是红外发射/接收元件距离近,反射闪光强烈,信噪比比较好,可以降低红外发射能量增加电池寿命。对于第三红外发射LED照射的反漏斗罩内壁需要设置光滑,使用黑色材料,使之不产生杂散反光。
第二安装套固定在漏斗口外表面顶部,靠近漏斗口的内壁为光滑平面,因为锥体内壁倾角缘故,红外发射LED的光束L12被内壁向下反射出反漏斗罩,不会直接照射到第三红外接收管,而昆虫C17进入红外照明区域时,其体表的漫反射光线L13会进入第三红外接收管,受第二遮光罩结构所限制,漏斗口边缘位置的昆虫C18为可探测区域的极限,后续诱捕器内部飞行昆虫C19的反光不会干扰第三红外接收管。此第二遮光罩结构可以遮挡反漏斗口以上部位的昆虫反光,避免已经捕获的昆虫产生触发和误报。
上述两个方案中的第一柱镜和第二柱镜主要能够使得红外传感器在水平方向具有更广的视角,垂直方向具有更聚焦而集中的视角,从而在目标穿过反漏斗口附近的圆形截面时候产生短促而清晰的光电信号。根据光路可逆原理(不需要考虑光线在透镜上反射),通过实验装置发现红外发射管投射的光线,与同样位置替换成红外接收管,其接收目标反射的光路和光强分布是一致的。根据实验结果,在红外传感器前安装柱状镜或光栅以实现更宽的视角和更均匀的灵敏度,所使用的柱镜光栅价格低廉,相比激光扩束镜具有更好的性价比(60线柱状光栅片的规格是一英寸内有60根柱镜,单个柱镜宽0.42mm,不存在光的干涉衍射和偏振现象,符合光路可逆原理)。故,使用柱状透镜可以增加红外接收管的视角,而且灵敏度在整个感光区域的更均匀,昆虫等目标触发的光电信号时的幅度也比较一致,容易处理
综上,即使红外接收简化为仅使用一枚红外接收管,但因为使用了独特的红外发射/接收光路和特别的电信号处理分析逻辑,本方案与单纯采用光电计数器的设计有本质的不同
参照图10所示,本申请的电路原理图,反射式光电传感器由单片机输出端口驱动红外发光管D1闪烁,红外接收管D2接收到的光电流由电容C1进行积分,经两级放大后提供给单片机输入端口读取,第二级运放主要处于饱或截止的工作状态,单片机仅需判断脉冲宽度变化即可获知昆虫飞入。
图中MCU I/O为单片机端口,R1为限流电阻,R4,R5,R7,R8为反馈电阻,R2,R3,R6为复位放电电阻,C2,C3为隔直耦合电容,Q1为LED驱动三极管
运放采用LM358,管脚如图所示。读取红外光电信号为单片机STM32F103C8T6的PB7端口,使用单片机的定时器PWM模式的输入捕获功能读取脉冲宽度。驱动红外发射LED的单片机端口为PB0。
参照图11所示,示波器所示通道1为驱动端给红外发射管上的压降,通道2为红外接收端电路接入单片机的电平变化信号。在夜间诱捕计数处于工作模式,单片机连续输出频率1KHz,脉冲宽度为6uS的信号驱动红外发光管闪烁,经过实际测试,静态环境反光脉冲为7us,本申请称为静态脉冲Tj。昆虫飞入光路可以达到或大于9us的脉冲,本申请称为触发脉冲,其脉冲宽度Tc。Tc-Tj>=2us。为了避免干扰,至少接收连续n个触发脉冲才被认为有昆虫飞过,本申请采用n=3个,飞过接收端视野路径长度L(忽略昆虫的身长,L为红外传感器探测范围与飞行路径交集的长度,本设计方案中L>=12mm),昆虫飞行速度为S,则飞掠时长Tf=L/S,按L=12mm,Tf>=3ms则S<=4m/s,
故,这种驱动和读取模式适合观察飞行速度低于4米/秒的昆虫。可以根据实际情况增加红外发光管闪烁频率,以利于统计飞行更快或者尺寸更小的昆虫。
其中静态脉冲宽度Tj的取值是根据滑动平均计算获得,使得诱捕器对于环境变化如灰尘积累有比较好的适应性。
昆虫的反光程度/红外感应电流/放大输出后脉冲宽度-这三者为正比例关系,电路参数设计需要匹配实际工作情况,使其对昆虫触发敏感,并且放大电路的极值与昆虫诱捕的异常情况匹配。电路中耦合电容C3、充放电电阻R3,C3选值1nF,R3选值为100Kohm,则其时间常数t=100us。其适合信号周期为T=2*Π*R*C=2*3.14*105*10-9=628us,在此时间范围内,耦合电容近似认为是导线,在设计中用实验的方法,选取偏大的昆虫模型和最佳反光的位置,调整第一级放大器的增益(选取反馈电阻R4,R5的阻值),使得放输出端(脚7)触发脉冲Tc约100us,程序依此Tc脉冲宽度可以估测诱捕到的昆虫尺寸。如果是Tc>100uS的异常脉冲持续很久(大于5S),则有可能是蜘蛛结网或异物阻塞诱捕器,诱捕器判断为故障,经由服务器发送维护信息给负责人。
参照图12所示,传感器在极端工作情况下(传感器内有强反光物体,如更大的昆虫飞过),二级放大器输出140us的触发高电平,并伴随有畸变的低电平跳变,单片机可以根据这种信号特性判断昆虫尺寸级别,或者报告故障,通知负责人清理诱捕器。
故,此红外诱捕器可以统计到昆虫尺寸和脉冲时间对应为:
Tc<=Tj+2:背景反射,无诱捕触发
Tj+2 100uS 100uS 其中,静态脉宽Tj为传感器在无触发状态下的脉宽滑动平均的结果,受光电器件和传感器结构限制,Tj应该在5us至15us之间,如果滑动平均结果超过上下限,也会上报服务器记录。 同层红外接收器如果超过一个,则其信号可以分别接入单片机端口处理,如单片机端口紧张,则可经过“或门”汇总后接入单片机。 如果使用上下两层接收器,则第一层和第二层传感器在飞入过程依次触发,逻辑判断触发次序可以得知其飞入/飞出方向,或是在诱捕器内活动(仅触发第二层接收器)。 本申请还公开一种数据通讯方法: 参照图13所示,为网络拓扑结构,为了降低通讯成本,降低传感器本身的功耗,本方案使用分散采集,集中数据通过物联网关与服务器通讯的方法,数量众多的传感器不需要SIM卡,使用低功耗射频通讯与物联网关通讯,物联网关使用SIM卡,可以支持数十至数百个传感器的数据传递。 传感器使用单片机芯片ID作为设备身份识别信息,经过配对,其ID存储在对应的物联网关的EEPROM里,作为网关过滤消息的依据。 传感器,物联网关使用标准MQTT协议,或者使用自定义的协议与服务器通讯,如此,诱捕器的无线数据可以经由物联网关接入网络,诱捕器的每一次触发都被记录和发送给服务器,服务器可以汇总诱捕数量信息,归纳出不同地块,不同种类诱芯对应的害虫在某一时段的平均每套诱捕传感器的捕获数量,以图表的方式显示这些种类害虫的发生数量,发生趋势。 为了核对诱捕器工作效果,可以在诱捕器内安装网络摄像头,对比昆虫飞入视频和本诱捕器的红外触发报告记录。 具体的软件功能流程如下: 昆虫诱捕器需要使用性信息素诱芯,此诱芯的挥发物质在拆开包装后会缓慢释放,根据诱芯种类有不同的有效性时长,典型更换周期为两个月,如果到期没有更换其诱捕效果则会大打折扣,影响害虫发生情况的监测准确性。因为诱捕器设置在乡村的田间,更换诱芯的工作往往委托当地农户完成,可是其具体执行工作难以监督,可能安装了错误种类的诱芯在诱捕器上,甚至更换记录作假,设备维护人没有去现场更换诱芯。 为了监测数据的真实有效,减少人为疏忽,本方案可以自动提醒对应的传感器负责人对其做适当的维护,并且追踪维护工作的完成;其中可以设置实体打卡按键,在完成操作后需要触发实体打卡按键,作为维护工作被执行的凭证。(其他的任务,比如红外传感器被遮挡需要清理,电池故障等,均可以用类似方法把消息推送给当地负责此设备维护的农户) 参照图14所示,以诱芯更换为例的提醒功能实现流程图;参照图15所示,为设备(传感器)维护人员收到提醒后,进行维护的程序流程,以诱芯更换为例的流程图。 综上所述,本申请具有以下优点: 1.本设计使用自动红外计数方法,可以大幅降低昆虫诱捕统计的人工劳动强度 2.因使用脉冲红外照射和自然烘干方式,本设计比其他方案功耗低,整体轻便,可以用插杆的方式安装,适合大批量部署,以便获取更详实的统计数据。 3.因为诱芯对不同的害虫有靶向吸引作用,可以设置多个诱捕器分别采用不同的诱芯,系统可以精确的统计不同害虫的诱捕/发生数量。 4.诱芯更换等维护工作对于数据准确性有很大影响,系统采用在诱芯寿命周期自动推送更换提醒给对应的农户,并且要求更换诱芯后按键“打卡”,减少人为错误。 5.系统搜集传感器数据,和记录人工干预事件,可以借助最新的大数据技术归纳其相关性,以利于采用更恰当的虫害防控方法,实现绿色农业的目标。 以上实施例仅是为充分说明本发明而所举的较佳的实施例,本发明的保护范围不限于此。本技术领域的技术人员在本发明基础上所作的等同替代或变换,均在本发明的保护范围之内。本发明的保护范围以权利要求书为准。
- 一种病虫害监测及管控系统
- 一种智能化升降梯管控系统和升降梯管控系统