一种基于模糊PID电流环控制的步进电机驱动器
文献发布时间:2023-06-19 10:22:47
技术领域
本发明涉及电机驱动器领域,具体涉及一种基于模糊PID电流环控制的步进电机驱动器。
背景技术
传统PID控制是以精确数学模型为基础的,无法有效应对系统的不确定信息,用不变的PID参数不可能达到较好的控制结果。模糊控制不需要对象的精确数学模型,对系统变化不敏感,鲁棒性好,抗干扰性强。但是由于它的模糊性,稳态精度不好。
发明内容
本发明的目的在于提供一种基于模糊PID电流环控制的步进电机驱动器。
为实现上述发明目的,本发明所采用的技术方案是:一种基于模糊PID电流环控制的步进电机驱动器,包括以下控制步骤:
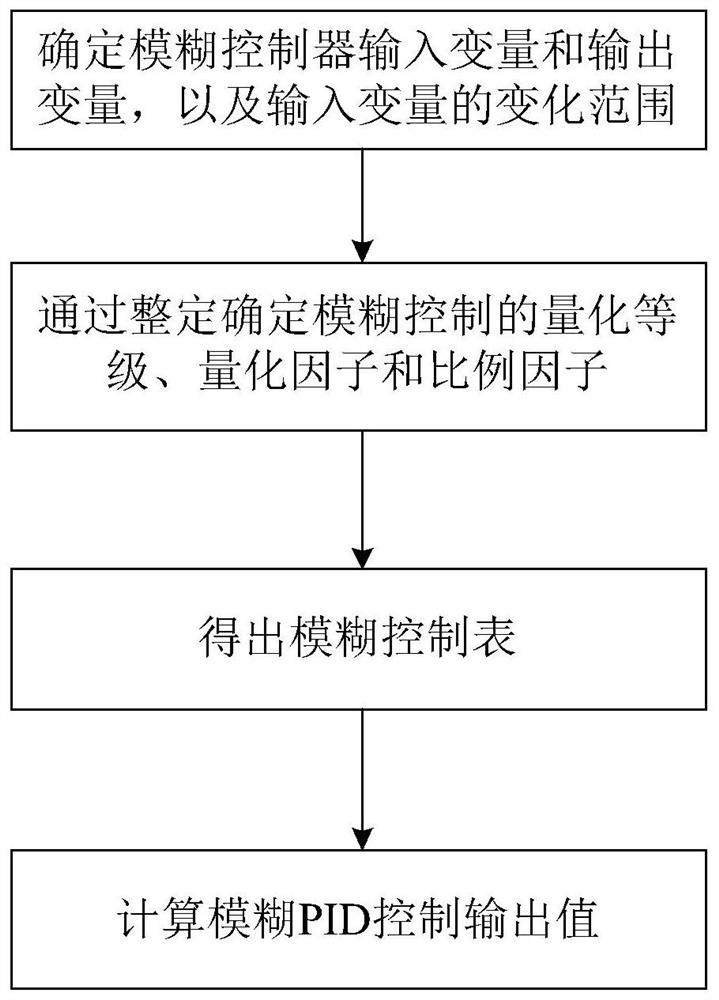
S1:确定模糊控制器输入变量和输出变量,以及输入变量的变化范围;
其中输入变量包括偏差E、偏差变化率EC;
S2:通过整定确定模糊控制的量化等级、量化因子和比例因子;
S3:得出模糊控制表:根据输入值和输出值分别得出比例系数Kp、积分时间常数Ki、微分时间常数Kd的模糊控制表;
S4:计算模糊PID控制输出值:将偏差E和偏差变化率EC代入模糊控制表中,得出模糊PID参数Kp’、Ki’、Kd’,再将Kp’、Ki’、Kd’代入PID算法中计算出模糊PID控制输出值:
其中,Kp为比例系数,Ki为积分系数,Kd为微分系数,E(k)和E(k-1)分别为第k和第k-1时刻的偏差信号,k为采样序号,T为采样时间。
优选的,所述步骤S2包括以下整定子步骤:
S21:通过隶属度确定偏差E、偏差变化率EC的模糊子集;
S22:引入偏差E、偏差变化率EC的模糊子集对应的论域;
S23:得出量化函数。
本发明的有益效果集中体现在:本发明能有效解决步进电机电流控制系统存在的非线性、干扰等特性,可以实现随环境的变化,参数自动改变,以达到更好的控制效果。其次,驱动器运行平稳,电流波形稳定,驱动器定位准确,有效地节约了各项生产成本。
附图说明
图1是本发明控制流程图;
图2是本发明控制系统框图。
具体实施方式
为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和具体实施例对本发明作进一步的详细说明。
如图1、2所示,一种基于模糊PID电流环控制的步进电机驱动器,包括以下控制步骤:
S1:确定模糊控制器输入变量和输出变量,以及输入变量的变化范围;
其中输入变量包括偏差E、偏差变化率EC,以及电机的输入电流和细分数,电机整定的比例、积分、微分;而输入电流和细分数由拨码开关确定,也就是说拨码开关可以用来调节驱动器的输入电流值;比例、积分、微分由确定的基础值开始基于设定值变化;
S2:通过整定确定模糊控制的量化等级、量化因子和比例因子;
具体的,步骤S2包括以下整定子步骤:
S21:通过隶属度确定偏差E、偏差变化率EC的模糊子集,在此偏差E、偏差变化率EC的模糊子集均为{NB,NM,NS,ZO,PS,PM,PB},其中,负大[NB]、负中[NM]、负小[NS]、零[ZO]、正小[PS]、正中[PM]、正大[PB];
隶属度是一个介于0和1之间的值,隶属度具有以下关系:
1.当某一元素u属于集合A时,就说该元素隶属度为1;
2.当某一元素u不属于集合A时,就说该元素隶属度为0;
3.当某一元素u部分属于集合A,部分不属于集合A时,就说该元素u对于A的隶属度是在开区间(0,1)中的某个数;
S22:引入偏差E、偏差变化率EC的模糊子集对应的论域,论域的范围由各种类型的电机的电阻和电感组成,在本实施例中论域的定义为:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6};
S23:得出偏差E、偏差变化率EC的量化函数:在图2中电流的测量信号有一个量程范围,记为Vmax和Vmin,因此偏差E的范围就是Vmin-Vmax到Vmax-Vmin的范围内,而偏差的增量范围则是其两倍:
则偏差E量化函数为:
偏差变化率EC的量化函数为:
根据公式(1)和公式(2)可将E和EC量化。
式(3)中,Kp为比例系数,Ki为积分系数,Kd为微分系数,E(k)和E(k-1)分别为第k和第k-1时刻的偏差信号,k为采样序号,T为采样时间;
S3:得出模糊控制表:根据输入值和输出值分别得出比例系数Kp、积分时间常数Ki、微分时间常数Kd的模糊控制表;
在PID控制器中,Kp值的选取决定于系统的响应速度。增大Kp能提高响应速度,减小稳态偏差;但是,Kp值过大会产生较大的超调,甚至使系统不稳定减小Kp可以减小超调,提高稳定性,但Kp过小会减慢响应速度,延长调节时间。因此,调节初期应适当取较大的Kp值以提高响应速度,而在调节中期,Kp则取较小值,以使系统具有较小的超调并保证一定的响应速度;而在调节过程后期再将Kp值调到较大值来减小静差,提高控制精度。因此本实施例中定义Kp的模糊控制表如下:
Kp模糊控制表
在系统控制中,积分控制主要是用来消除系统的稳态偏差。由于某些原因(如饱和非线性等),积分过程有可能在调节过程的初期产生积分饱和,从而引起调节过程的较大超调。
因此,在调节过程的初期,为防止积分饱和,其积分作用应当弱一些,甚至可以取零;
而在调节中期,为了避免影响稳定性,其积分作用应该比较适中;
最后在过程的后期,则应增强积分作用,以减小调节静差。
依据以上分析,因此本实施例中定义Ki模糊控制表如下:
Ki模糊控制表
微分环节的调整主要是针对大惯性过程引入的,微分环节系数的作用在于改变系统的动态特性。系统的微分环节系数能反映信号变化的趋势,并能在偏差信号变化太大之前,在系统中引入一个有效的早期修正信号,从而加快响应速度,减少调整时间,消除振荡.最终改变系统的动态性能。
因此,Kd值的选取对调节动态特性影响很大。Kd值过大,调节过程制动就会超前,致使调节时间过长;Kd值过小,调节过程制动就会落后,从而导致超调增加。根据实际过程经验,在调节初期,应加大微分作用,这样可得到较小甚至避免超调;
而在中期,由于调节特性对Kd值的变化比较敏感,因此,Kd值应适当小一些并应保持固定不变;
然后在调节后期,Kd值应减小,以减小被控过程的制动作用,进而补偿在调节过程初期由于Kd值较大所造成的调节过程的时间延长。
依据以上分析,因此本实施例中定义Kd模糊控制表如下:
Kd模糊控制表
S4:计算模糊PID控制输出值:将偏差E和偏差变化率EC代入模糊控制表中,得出模糊PID参数Kp’、Ki’、Kd’,再将Kp’、Ki’、Kd’代入PID算法中计算出模糊PID控制输出值;
如:设定的电流为C
其中,Kp为比例系数,Ki为积分系数,Kd为微分系数,E(k)和E(k-1)分别为第k和第k-1时刻的偏差信号,k为采样序号,T为采样时间。
本发明能有效解决步进电机电流控制系统存在的非线性、干扰等特性,可以实现随环境的变化,参数自动改变,以达到更好的控制效果。其次,驱动器运行平稳,电流波形稳定,驱动器定位准确,有效地节约了各项生产成本。
需要说明的是,对于前述的各个方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本申请并不受所描述的动作顺序的限制,因为依据本申请,某一些步骤可以采用其他顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作和单元并不一定是本申请所必须的。
- 一种基于模糊PID电流环控制的步进电机驱动器
- 一种基于步进电机驱动器的总线转接运动控制模块