一种上肢外骨骼助力装置及控制方法
文献发布时间:2023-06-19 10:25:58
技术领域
本发明涉及助力器械技术领域,特别是涉及一种上肢外骨骼助力装置及控制方法。
背景技术
外骨骼机器人技术是融合传感、控制、信息、移动计算,为操作者提供一种可穿戴的机械结构的综合技术。随着科学技术的发展,材料技术,传感器技术,仿生学技术以及控制技术等领域出现突破,促进了外骨骼机器人系统的研发。在工厂、仓库、货运等工作场景,需要人长期频繁的搬运重物,对工人的上肢带来严重负担。
现有技术中,上肢外骨骼助力机器人用多个杆臂通过多个电机连接起来,每个杆臂都要通过绑带与躯体固连,不仅穿脱起来复杂,而且很重,给身体带来更多压力,不够灵活,助力效果不明显,整体架构复杂,响应速度慢,控制起来相对困难,不适合在现实生活中使用。经过改善,虽然将电机驱动变为液压驱动,仅仅减小了整体装置重量,但是仍然不能解决穿脱复杂、控制困难、响应速度慢等缺陷。
因此,现有上肢外骨骼助力装置存在穿脱复杂、控制困难、响应速度慢的问题。
发明内容
本发明的目的是提供一种上肢外骨骼助力装置及控制方法,通过设置背部牵引装置、左悬挂装置和右悬挂装置来在提起重物时解放双手。
为实现上述目的,本发明提供了如下方案:
一种上肢外骨骼助力装置,包括:背部牵引装置和与所述背部牵引装置连接的左悬挂装置和右悬挂装置,所述背部牵引装置用于驱动所述左悬挂装置和所述右悬挂装置运动;
所述左悬挂装置和所述右悬挂装置均包括吊臂和吊钩,所述吊钩通过所述吊臂与所述背部牵引装置连接,所述吊钩用于在所述背部牵引装置的驱动下取放重物。
可选的,所述背部牵引装置包括:主处理器和惯性测量模块;所述左悬挂装置和所述右悬挂装置均包括:接近传感器、拉力传感器和协处理器;所述主处理器和所述惯性测量模块连接,所述接近传感器和所述拉力传感器均和所述协处理器连接。
可选的,所述背部牵引装置还包括:左驱动机构和右驱动机构,所述左驱动机构和所述右驱动机构均包括电机和电机驱动器,所述电机驱动器分别与所述主处理器和所述电机连接。
可选的,所述背部牵引装置还包括:编码器,所述编码器分别与所述主处理器和所述电机连接,所述编码器包括左编码器和右编码器。
可选的,所述背部牵引装置还包括:牵引端无线通信模块,所述牵引端无线通信模块和所述主处理器连接;
所述左悬挂装置和所述右悬挂装置还均包括:悬挂端无线通信模块;所述悬挂端无线通信模块和所述协处理器连接。
可选的,所述背部牵引装置还包括:牵引端电源模块;
所述左悬挂装置和所述右悬挂装置还均包括:悬挂端电源模块和无线充电模块;
所述主处理器、所述惯性测量模块、所述电机驱动器、所述编码器、所述牵引端无线通信模块和所述无线充电模块均和所述牵引端电源模块连接;
所述协处理器、所述接近传感器、所述拉力传感器和所述无线充电模块均和所述悬挂端电源模块连接。
可选的,所述左悬挂装置和所述右悬挂装置还均包括连接组件;所述连接组件设置在吊臂上,所述连接组件包括滑轮和钢丝绳;所述钢丝绳卷绕在所述滑轮上,所述钢丝绳的一端卷绕于所述电机的卷筒上,所述钢丝绳的另一端与所述吊钩连接。
可选的,所述背部牵引装置通过背带固定在人体上。
一种上肢外骨骼助力控制方法,应用于上述上肢外骨骼助力装置,所述控制方法包括:
获取人体姿态信息、左悬挂装置采集到的左接近信号、左悬挂装置采集到的左拉力信号、右悬挂装置采集到的右接近信号和右悬挂装置采集到的右拉力信号;
根据所述人体姿态信息、所述左接近信号和所述左拉力信号控制所述左悬挂装置中的吊钩的运动;
根据所述人体姿态信息、所述右接近信号和所述右拉力信号控制所述右悬挂装置中的吊钩的运动。
可选的,所述根据所述人体姿态信息、所述左接近信号和所述左拉力信号控制所述左悬挂装置中的吊钩的运动,具体包括:
当所述左接近信号、所述左拉力信号均不为零时,控制所述左悬挂装置中的吊钩向下运动,直至所述左接近信号、所述左拉力信号均为零且所述左悬挂装置中的吊钩处于重物所在的位置时,控制所述左悬挂装置中的吊钩停止运动;
当所述人体姿态信息表示起身、所述接近信号为零且所述拉力信号增大时,控制所述左悬挂装置中的吊钩向上运动,直至所述左接近信号为零且所述左拉力信号发生突变时,控制所述左悬挂装置中的吊钩停止运动;
当所述人体姿态信息表示弯腰或下蹲、所述左接近信号为零且所述左拉力信号开始减小时,控制所述左悬挂装置中的吊钩向下运动,直至所述左接近信号、所述左拉力信号均为零且所述左悬挂装置中的吊钩处于所述重物的目标位置时,控制所述左悬挂装置中的吊钩停止运动;
当所述左接近信号不为零,且所述左拉力信号为零时,控制所述左悬挂装置中的吊钩向上运动,直至所述左接近信号、所述左拉力信号均为零且所述左悬挂装置中的吊钩处于初始位置时,控制所述左悬挂装置中的吊钩停止运动。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明公开了一种上肢外骨骼助力装置及控制方法。该上肢外骨骼助力装置包括:背部牵引装置、左悬挂装置和右悬挂装置,背部牵引装置包括:主处理器和惯性测量模块;左悬挂装置和右悬挂装置均包括:接近传感器、拉力传感器和协处理器;主处理器和惯性测量模块连接,接近传感器和拉力传感器均和协处理器连接。该上肢外骨骼助力装置将背部牵引装置通过背带背在背后,左悬挂装置挂在左肩,右悬挂装置挂在右肩,通过左悬挂装置和右悬挂装置来代替双手,在提起重物时解放了双手,使得穿戴更加方便。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
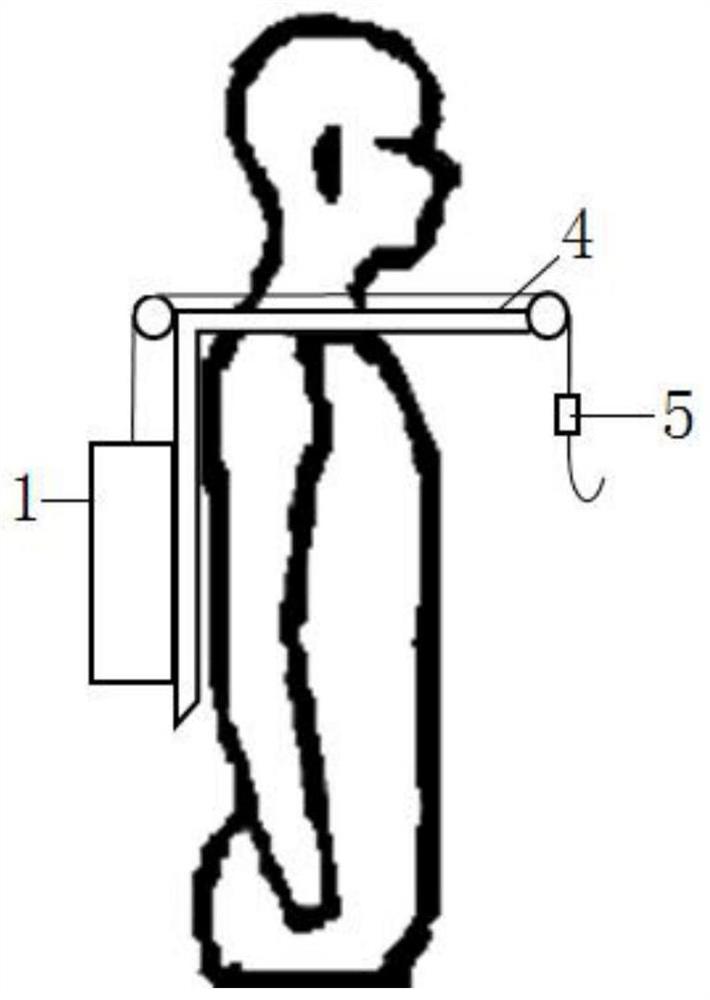
图1为本发明实施例提供的上肢外骨骼助力装置的结构示意图
图2为本发明实施例提供的上肢外骨骼助力装置的内部结构图。
符号说明:1-背部牵引装置,2-左悬挂装置,3-右悬挂装置,4-吊臂,5-吊钩,6-左驱动机构,7-右驱动机构。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种上肢外骨骼助力装置及控制方法,旨在通过设置背部牵引装置、左悬挂装置和右悬挂装置来在提起重物时解放双手,可应用于助力器械技术领域。本发明公开的上肢外骨骼助力装置将背部牵引装置通过背带背在背后,左悬挂装置挂在左肩,右悬挂装置挂在右肩,通过左悬挂装置和右悬挂装置来代替双手,在提起重物时解放了双手,使得穿戴更加方便。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
图1为本发明实施例提供的上肢外骨骼助力装置的结构示意图。图2为本发明实施例提供的上肢外骨骼助力装置的内部结构图。如图1和图2所示,本实施例中的上肢外骨骼助力装置,包括:背部牵引装置1和与背部牵引装置1连接的左悬挂装置2和右悬挂装置3,背部牵引装置1用于驱动左悬挂装置2和右悬挂装置3运动。
左悬挂装置2和右悬挂装置3均包括吊臂4和吊钩5,吊钩5通过吊臂4与背部牵引装置1连接,吊钩5用于在背部牵引装置1的驱动下取放重物。
作为一种可选的实施方式,背部牵引装置1包括:主处理器和惯性测量模块;左悬挂装置2和右悬挂装置3均包括:接近传感器、拉力传感器和协处理器;主处理器和惯性测量模块连接,接近传感器和拉力传感器均和协处理器连接。
具体的,主处理器的型号为STM32F407,惯性测量模块的型号为MPU9250,接近传感器的型号为E3F-DS30C4,拉力传感器的型号为DYMH-106,协处理器的型号为STM32F103。接近传感器用于检测手是否握持左悬挂装置和/或右悬挂装置并产生接近信号,拉力传感器用于检测拉力并产生拉力信号,协处理器用于接收接近信号和拉力信号并将接近信号和拉力信号传输给主处理器,惯性测量模块用于获取人体姿态信息。
作为一种可选的实施方式,背部牵引装置1还包括:左驱动机构6和右驱动机构7,左驱动机构6和右驱动机构7均包括电机和电机驱动器,电机驱动器分别与主处理器和电机连接。
具体的,电机的型号为AK80-6,电机驱动器的型号为NTMFS4935NT1G。
作为一种可选的实施方式,背部牵引装置1还包括:编码器,编码器分别与主处理器和电机连接,编码器包括左编码器和右编码器。编码器用于检测电机的初始位置并将初始位置发送给主处理器。
具体的,编码器的型号为AS5047P。
作为一种可选的实施方式,背部牵引装置1还包括:牵引端无线通信模块,牵引端无线通信模块和主处理器连接。
左悬挂装置2和右悬挂装置3还均包括:悬挂端无线通信模块;悬挂端无线通信模块和协处理器连接。
具体的,牵引端无线通信模块和悬挂端无线通信模块的型号均为BLE-TPT。
作为一种可选的实施方式,背部牵引装置1还包括:牵引端电源模块。
左悬挂装置2和右悬挂装置3还均包括:悬挂端电源模块和无线充电模块。具体的,无线充电模块的型号为XKT901-19。
主处理器、惯性测量模块、电机驱动器、编码器、牵引端无线通信模块和无线充电模块均和牵引端电源模块连接。
协处理器、接近传感器、拉力传感器和无线充电模块均和悬挂端电源模块连接。
牵引端电源模块用于对主处理器、惯性测量模块、电机驱动器、编码器、牵引端无线通信模块和悬挂端电源模块供电。
悬挂端电源模块用于对协处理器、接近传感器、拉力传感器以及悬挂端无线通信模块供电。
作为一种可选的实施方式,左悬挂装置1和右悬挂装置2还均包括连接组件;连接组件设置在吊臂4上,连接组件包括滑轮和钢丝绳;钢丝绳卷绕在滑轮上,钢丝绳的一端卷绕于电机的卷筒上,钢丝绳的另一端与吊钩4连接。
作为一种可选的实施方式,背部牵引装置1通过背带固定在人体上。
本发明还提供了一种上肢外骨骼助力控制方法,应用于上述上肢外骨骼助力装置,控制方法包括:
获取人体姿态信息、左悬挂装置采集到的左接近信号、左悬挂装置采集到的左拉力信号、右悬挂装置采集到的右接近信号和右悬挂装置采集到的右拉力信号。
根据人体姿态信息、左接近信号和左拉力信号控制左悬挂装置中的吊钩的运动。
根据人体姿态信息、右接近信号和右拉力信号控制右悬挂装置中的吊钩的运动。
作为一种可选的实施方式,根据人体姿态信息、左接近信号和左拉力信号控制左悬挂装置中的吊钩的运动,具体包括:
当左接近信号、左拉力信号均不为零时,表示要将左悬挂装置中的吊钩移动到重物所在的位置,控制左悬挂装置中的吊钩向下运动,直至左接近信号、左拉力信号均为零且左悬挂装置中的吊钩处于重物所在的位置时,控制左悬挂装置中的吊钩停止运动,之后将重物挂在左悬挂装置中的吊钩上。
当人体姿态信息表示起身、接近信号为零且拉力信号增大时,表示重物已经挂好且开始移动重物,控制左悬挂装置中的吊钩向上运动,直至左接近信号为零且左拉力信号发生突变时,表示重物已经到达目标位置的上方,控制左悬挂装置中的吊钩停止运动。
当人体姿态信息表示弯腰或下蹲、左接近信号为零且左拉力信号开始减小时,表示要放下重物,控制左悬挂装置中的吊钩向下运动,直至左接近信号、左拉力信号均为零且左悬挂装置中的吊钩处于重物的目标位置时,控制左悬挂装置中的吊钩停止运动,之后将重物从左悬挂装置中的吊钩3取下放置在目标位置。
当左接近信号不为零,且左拉力信号为零时,表示左悬挂装置中的吊钩要停止工作,控制左悬挂装置中的吊钩向上运动,直至左接近信号、左拉力信号均为零且左悬挂装置中的吊钩处于初始位置时,控制左悬挂装置中的吊钩3停止运动,之后对左悬挂装置中的吊钩进行充电。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的装置、方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 上肢助力外骨骼的控制方法、装置和上肢助力外骨骼系统
- 一种上肢外骨骼助力装置及控制方法