一种智能芒果采收机
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及一种智能芒果采收机,属于农业机械技术领域。
背景技术
芒果是一种营养价值十分高的水果,且口味比较独特,受到广大人们的喜爱,因此芒果的种植行业正在蓬勃发展,世界芒果栽培面积不断扩大,产量也逐年上升,在热带水果中排名第3,已成为世界五大水果之一。我国种植和生产芒果主要分布在海南、广东、广西、福建、云南等地区。平均每年增长率增长6.62%,但机械化种植面积仅有5%。目前我国芒果生产机械化程度十分低下,尤其采收环节,截至目前为止,芒果采摘仍然采用人工采摘的方式,劳动强度大,安全性差,极大地限制了芒果产业化、商品化的发展。
芒果机械化是提高生产效率、降低作业成本的有效技术措施。芒果人工套袋是将袋100套在芒果101外部,是目前防止虫害最有效的办法,芒果套袋和收获环节是整个芒果产业链最耗时、费力的工序,芒果套袋和采摘质量的好坏决定了储存加工和销售效率。
发明内容
本发明是为了解决现有的芒果采收过程机械化程度低的问题,进而提供了一种智能芒果采收机。
本发明为解决上述技术问题所采用的技术方案是:
一种智能芒果采收机,它包括机架、安装在机架顶端的电动绞盘、安装在机架底端的行走组件、相对固装在机架下部的两个果实收集箱以及安装在一个果实收集箱上的智能控制系统,其中,两个果实收集箱之间存在供果树的树干通过的间隙,且两个果实收集箱相对的一侧安装有对射式光电开关,所述智能控制系统与对射式光电开光及电动铰盘之间分别通过有线或无线连接,电动绞盘上缠绕绳索,且绳索上穿设有若干环形割刀。
进一步地,两个果实收集箱相对的一侧上部均安装有橡胶挡片。
进一步地,每个橡胶挡片的一侧均呈齿形结构,两个橡胶挡片上的齿形结构交错布置。
进一步地,所述果实收集箱包括底板及呈矩形结构布置的四个挡板,其中三个挡板的顶端各固装有一个倾斜板,所述橡胶挡片及所述倾斜板均向果实收集箱外侧倾斜布置。
进一步地,每个果实收集箱内均铺设有减震海绵。
进一步地,所述环形割刀包括割刀主体及固装在割刀主体上的穿绳环,其中所述割刀主体呈环形结构且其内壁沿其环向固装有齿形刀片。
进一步地,所述行走组件包括同步电机及四个行走轮,每个行走轮均通过同步电机提供动力,且所述同步电机与所述智能控制系统通过有线或无线连接。
进一步地,一个果实收集箱上安装有蓄电池,通过蓄电池为电动绞盘提供动力。
进一步地,机架的顶端固装有安装平台,所述电动绞盘固装在安装平台上。
进一步地,机架的尺寸长×宽×高为3000mm×4600mm×3000mm,果实收集箱的尺寸长×宽×高为2800mm×1900mm×400mm。
本发明与现有技术相比具有以下效果:
通过本申请的采收机进行芒果采收,与人工采收相比提高芒果采收效率效率300%左右。本申请可实现芒果全程机械化采收,收获效率高。
附图说明
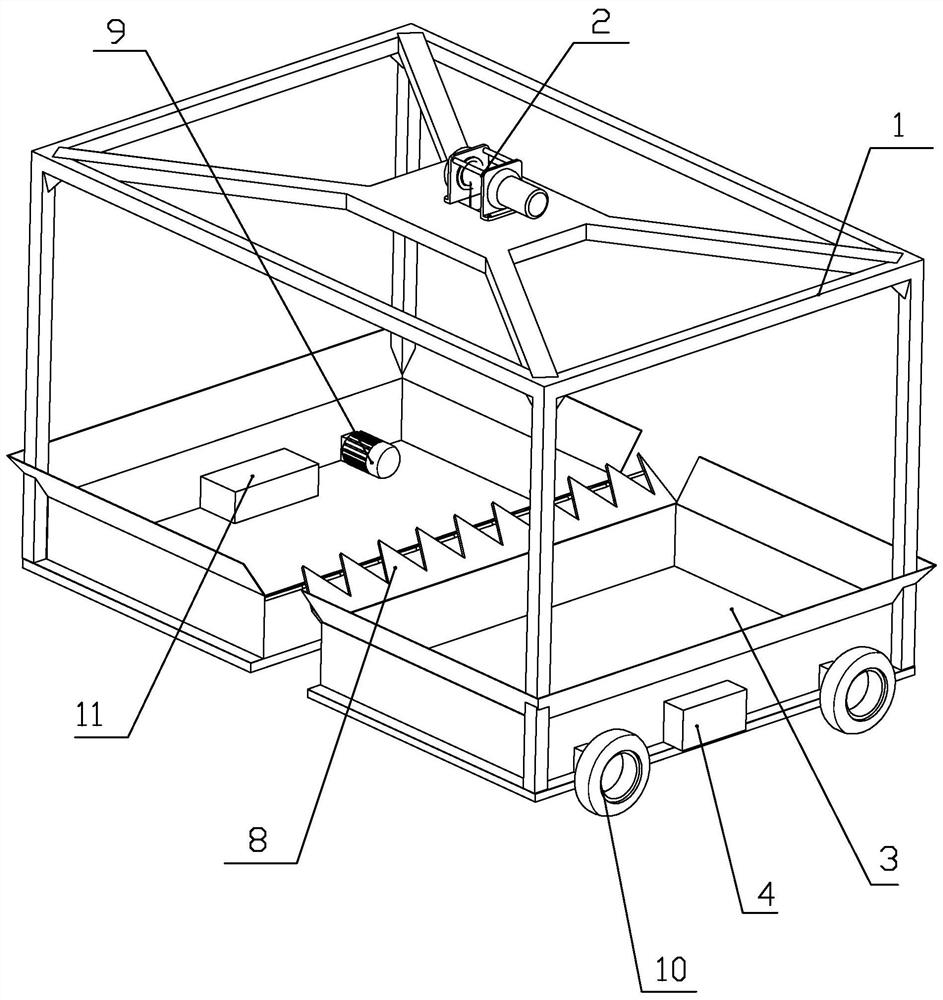
图1为本申请的立体结构示意图;
图2为本申请的主视示意图;
图3为果实收集箱的立体结构示意图;
图4为机架的立体结构示意图;
图5为环形割刀的立体结构示意图;
图6为环形割刀套装在芒果果根处的示意图;
图7为电动绞盘的立体结构示意图。
具体实施方式
具体实施方式一:结合图1~7说明本实施方式,一种智能芒果采收机,它包括机架1、安装在机架1顶端的电动绞盘2、安装在机架1底端的行走组件、相对固装在机架1下部的两个果实收集箱3以及安装在一个果实收集箱3上的智能控制系统4,其中,两个果实收集箱3之间存在供果树的树干通过的间隙,且两个果实收集箱3相对的一侧安装有对射式光电开关5,所述智能控制系统4与对射式光电开光及电动铰盘之间分别通过有线或无线连接,电动绞盘2上缠绕绳索6,且绳索6上穿设有若干环形割刀7。
采收芒果时,果树的树干位于两个果实收集箱3之间,所述智能控制系统4为现有技术,此处不再赘述。
果实收集箱3用来收集采摘下的芒果。
通过对射式光电开关5传递信号给智能控制系统4,通过智能控制系统4控制行走组件行走及控制电动绞盘2工作。
机架1高于芒果果树设置,电动绞盘2位于芒果果树上方。
电动绞盘2采用现有技术,其主要包括排线器2-1、电动机2-2、滚筒2-3、智能控制接收器2-4组成,尺寸为300×120×150mm,垂直吊重200kg,空载速度为6m/min,安置于机架1上方平台处。电动绞盘2通过24v直流蓄电池11进行供电,电动绞盘2通过螺栓连接固定在机架1上方平台上面。
通过本申请的采收机进行芒果采收,与人工采收相比提高芒果采收效率效率300%左右。本申请可实现芒果全程机械化采收,收获效率高。
工作原理:
在前期对芒果进行人工套袋的过程中,同时将环形割刀7套置于芒果果柄根部,然后通过一根绳索6将若干环形割刀7同时串联起来,也可在人工套袋前就将环形割刀7用绳索6穿在一起,再套在芒果根部。套袋结束后,绳索6预留在芒果树上,为后期采收芒果作准备。
采收芒果时,通过行走组件带动整个采收机移动,当采收机穿过芒果树时,芒果树的树干会切断对射式光电开关5发出的激光,对射式光电开关5将激光被切断信号传递给智能控制系统4。当智能控制系统4接收到对射式光电开关5传递的信号后,将控制行走组件停止移动,在采收机停止运动后,将提前布置在芒果树上的绳索与电动绞盘相连,然后绞盘开始工作,同时控制电动绞盘2开始工作。通过电动铰盘的转动带动绳索6收紧拉扯环形割刀7,将芒果全部切割下来,进而达到采收芒果的目的。
采收完成后,将绳索6与电动绞盘2分离,取下所有的环形割刀7,智能控制系统4控制行走组件移动,从而将采收机移动到下一颗芒果树,重复上述动作。
在实际使用过程中,还可在芒果林的两头各放置一个往复移动式平台,当芒果采收机采收完一行芒果树后,行驶到往复移动式平台上,跟随移动平台往复移动,完成换行工作。当整排芒果树采收完毕后,智能芒果采收机将行驶到林地头的往复式移动平台上面,跟随移动平台移动到下一排芒果树位置。
两个果实收集箱3相对的一侧上部均安装有橡胶挡片8。保证芒果顺利通过两个果实收集箱3的情况下,防止芒果通过两果实收集箱3之间的间隙掉落在地上。
每个橡胶挡片8的一侧均呈齿形结构,两个橡胶挡片8上的齿形结构交错布置。如此设计,保证在果树树干通过两果实收集箱3之间时,能够起到更好的防护作用,进一步防止芒果通过两果实收集箱3之间的间隙掉落在地上。
所述果实收集箱3包括底板及呈矩形结构布置的四个挡板,其中三个挡板的顶端各固装有一个倾斜板3-1,所述橡胶挡片8及所述倾斜板3-1均向果实收集箱3外侧倾斜布置。防止芒果掉落到芒果采收车外。底板、挡板及倾斜板3-1均采用热轧普通薄钢板,厚度为2mm
每个果实收集箱3内均铺设有减震海绵。防止芒果掉落后受损。
所述环形割刀7包括割刀主体7-1及固装在割刀主体7-1上的穿绳环7-2,其中所述割刀主体7-1呈环形结构且其内壁沿其环向固装有齿形刀片7-3。割刀主体7-1采用弹簧卡扣形式,类似现有技术中的圆形登山扣结构,材料选用304不锈钢,优选割刀主体7-1的外径为30mm,开口宽度为12mm。齿形刀片7-3的弧长为25mm,穿绳环7-2的外径为5mm。绳索6穿在穿绳环7-2上。割刀主体7-1套在芒果果根部。
所述行走组件包括同步电机9及四个行走轮10,每个行走轮10均通过同步电机9提供动力,且所述同步电机9与所述智能控制系统4通过有线或无线连接。四个行走轮10中包括两个前轮和两个后轮,实现整个采收机的前进、后退动作。
一个果实收集箱3上安装有蓄电池11,通过蓄电池11为电动绞盘2提供动力。所述蓄电池11为24v直流蓄电池11。
机架1的顶端固装有安装平台12,所述电动绞盘2固装在安装平台12上。
机架1的尺寸长×宽×高为3000mm×4600mm×3000mm,果实收集箱3的尺寸长×宽×高为2800mm×1900mm×400mm。机架1采用100mm×100mm的方钢钢管,机架1顶端的安装平台12为950mm×1200mm,安装平台12的中心开设有100mm×120mm的方形孔,绳索6通过方形孔与电动绞盘2连接。
- 一种智能芒果采收机
- 一种智能芒果采收机