一种激光焊接机多工位焊接工作台
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及焊接设备技术领域,特别是一种激光焊接机多工位焊接工作台。
背景技术
激光焊接是利用高能量密度的激光束作为热源的一种高效精密焊接方法,激光焊接是加工技术应用的重要方面之一,随着各类激光焊接机向大功率、轻便化和经济化的发展,激光焊接由于能源高度集中和热影响区小,符合优质、低耗、高效、清洁、热影响区窄、接头变形小、操作灵活等技术发展方向,并且激光束具有可以在大气中焊接的优点,既可以对大型构件作深熔焊,又可以进行微形件精密焊接,其应用前景非常广阔,现有技术中,小型激光焊接机大都配置单一的工作台,在实际的焊接加工作业过程中,需要工作人员不断地将工件放置在夹具上进行焊接作业,移动频次较高,劳动强度较大,不适合批量加工小型点焊式零部件,作业效率较低,鉴于此,针对上述问题深入研究,遂有本案产生。
发明内容
本发明的目的是为了解决上述问题,设计了一种激光焊接机多工位焊接工作台,解决了现有技术中,型激光焊接机大都配置单一的工作台,在实际的焊接加工作业过程中,需要工作人员不断地将工件放置在夹具上进行焊接作业,移动频次较高,劳动强度较大,不适合批量加工小型点焊式零部件,作业效率较低的问题。
实现上述目的本发明的技术方案为:一种激光焊接机多工位焊接工作台,包括激光焊机主体,所述激光焊机主体一侧设置有固定架,所述固定架上设置有间歇式给料机构,所述间歇式给料机构上设置有组合式夹紧机构,所述间歇式给料机构一侧设置有机械手臂;
所述间歇式给料机构包括:箱体、驱动控制组件、传动连接组件以及回转台,所述箱体设置于固定架内,所述驱动控制组件设置于箱体内,所述传动连接组件设置于箱体内、且一端与驱动控制组件相连接、另一端伸出到箱体外、所述回转台设置于固定架上、且与传动连接组件的外露端上,所述回转台与固定架之间设置有限位锁紧结构;
所述组合式夹紧机构包括:四个模具以及四个限位夹持结构,四个所述模具沿环形阵列设置回转台上,四个所述限位夹持结构分别设置于四个模具的两侧位置上。
所述驱动控制组件包括:回转电机、减速器以及输出轴,所述回转电机设置于箱体内,所述减速器的输入端与回转电机的驱动端相连接,所述输出轴设置于减速器的输出端上。
所述传动连接组件包括:传动控制构件以及间歇控制构件,所述传动控制构件设置箱体内、且一端与输出轴相连接,所述间歇控制构件设置于传动连接构件的一端上,所述间歇控制构件的一端伸出到箱体外。
所述传动控制构件包括:安装架、转动轴、蜗轮以及蜗杆,所述安装架设置于箱体内,所述转动轴沿垂直方向转动插装于安装架上,所述蜗轮固定套装于转动轴的下端上,所述蜗杆设置于输出轴的一端上、且与所述蜗轮相啮合。
所述间歇控制构件包括:转轮、圆柱销、连接轴以及槽轮,所述转轮的圆心固定焊接于转动轴的上端上,所述圆柱销固定设置于转轮上端面上,所述连接轴转动插装于箱体上端面上,所述连接轴的上端与回转台相连接,所述槽轮固定套装于连接轴的下端上,所述槽轮为盘面上开设有四个U型槽的盘状结构,所述U型槽的尺寸与圆柱销相匹配。
所述限位锁紧结构包括两个气动限位组件,两个所述气动限位组件对称设置于固定架侧壁上,所述回转台的下端面沿圆周方向开设有四个定位盲槽,所述定位盲槽的尺寸与气动限位组件的尺寸相匹配。
所述气动限位组件包括:固定座、限位气缸以及弹性插接构件,所述固定座设置于固定架侧壁上,所述限位气缸设置于固定座上、且活塞端垂直向上,所述弹性插接构件设置于限位气缸的活塞端上。
所述弹性插接构件包括:安装座、弹性支撑件、连接座以及插杆,所述安装座设置于限位气缸的活塞端上,所述弹性支撑件设置于安装座上,所述连接座设置于弹性支撑件上,所述插杆的一端固设于连接座上。
所述弹性支撑件包括:压缩弹簧以及伸缩柱,所述压缩弹簧设置于安装座以及连接座之间、且两端分别与安装座以及连接座固定连接,所述伸缩柱设置于压缩弹簧内、且上下两端分别与安装座以及连接座固定连接。
所述限位夹持结构包括两个气动夹持组件,两个所述气动夹持组件对称设置于模具两侧,伸缩式气动夹持组件包括:夹持气缸以及夹块,所述夹持气缸设置于模具一侧,所述夹块设置于夹持气缸的活塞端上。
利用本发明的技术方案制作的激光焊接机多工位焊接工作台,在激光焊机主体一侧设置间歇式进料机构,间歇式进料机构上设置有组合式夹紧机构,在使用时,操作人员将待焊接工件放置到模具内,控制组合式夹紧机构对工件进行定位夹持,控制间歇式进料机构动作,将组合待焊接工件移动至激光焊机主体的焊头下部,进行焊接作业,焊接完成后,控制间歇式进料机构动作,将下一个待焊接工件移动至激光焊机主体内,同时控制组合式夹紧机构解除对成品工件的限制作用,并利用机械手臂将成品工件取下,从而实现多个工位的循环间歇式进料作业,进而实现激光焊接作业的半自动化进行,解决了现有技术中,型激光焊接机大都配置单一的工作台,在实际的焊接加工作业过程中,需要工作人员不断地将工件放置在夹具上进行焊接作业,移动频次较高,劳动强度较大,不适合批量加工小型点焊式零部件,作业效率较低的问题。
附图说明
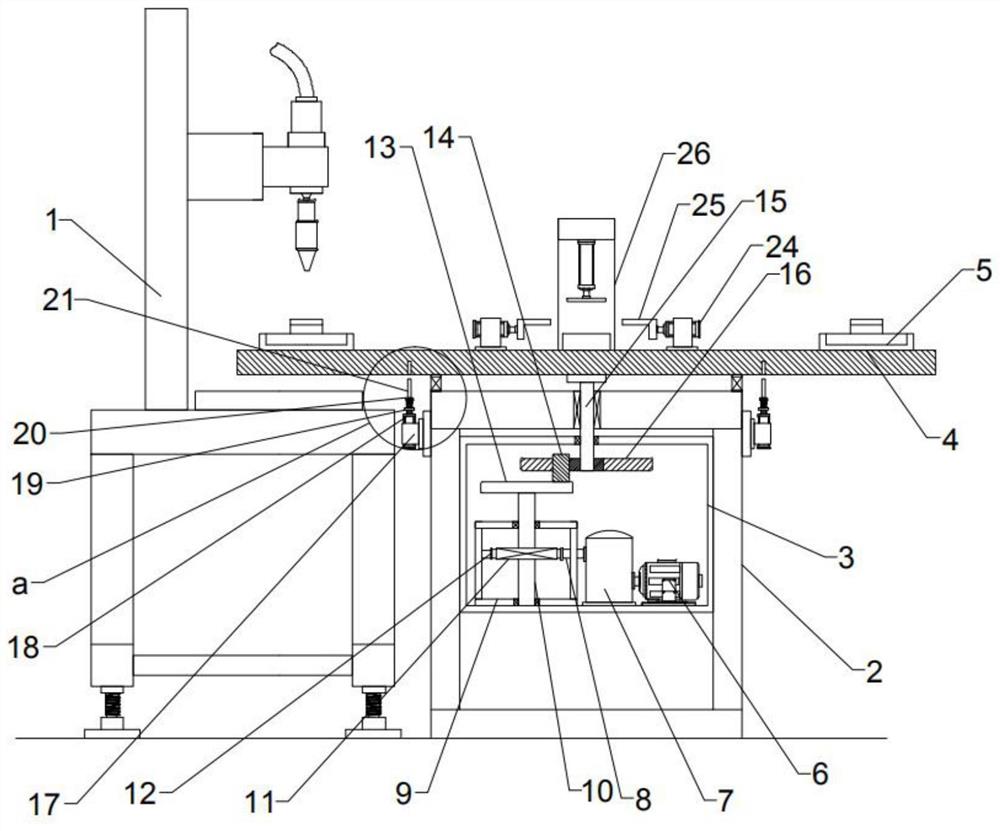
图1为本发明所述一种激光焊接机多工位焊接工作台的主视结构示意图。
图2为本发明所述一种激光焊接机多工位焊接工作台的侧视结构示意图。
图3为本发明所述一种激光焊接机多工位焊接工作台的俯视剖面结构示意图。
图4为本发明所述一种激光焊接机多工位焊接工作台的图1的局部放大结构示意图。
图5为本发明所述一种激光焊接机多工位焊接工作台的A-A位置的俯视剖面结构示意图。
图6为本发明所述一种激光焊接机多工位焊接工作台的B-B位置的俯视剖面结构示意图。
图7为本发明所述一种激光焊接机多工位焊接工作台的a位置局部放大结构示意图。
图中:1-激光焊机主体;2-固定架;3-箱体;4-回转台;5-模具;6-回转电机;7-减速器;8-输出轴;9-安装架;10-转动轴;11-蜗轮;12-蜗杆;13-转轮;14-圆柱销;15-连接轴;16-槽轮;17-固定座;18-限位气缸;19-安装座;20-连接座;21-插杆;22-压缩弹簧;23-伸缩柱;24-夹持气缸;25-夹块;26-机械手臂。
具体实施方式
下面结合附图对本发明进行具体描述,如图1-7所示,通过本领域人员,将本案中所有电气件与其适配的电源通过导线进行连接,并且应该根据实际情况,选择合适的控制器,以满足控制需求,具体连接以及控制顺序,应参考下述工作原理中,各电气件之间先后工作顺序完成电性连接,其详细连接手段,为本领域公知技术,下述主要介绍工作原理以及过程,不在对电气控制做说明。
实施例:由说明书附图1-7可知,本方案包括激光焊机主体1,激光焊机主体1一侧设置有固定架2,固定架2上设置有间歇式给料机构,间歇式给料机构上设置有组合式夹紧机构,间歇式给料机构一侧设置有机械手臂26;上述间歇式给料机构包括:箱体3、驱动控制组件、传动连接组件以及回转台4,其位置关系以及连接关系如下,箱体3设置于固定架2内,驱动控制组件设置于箱体3内,传动连接组件设置于箱体3内、且一端与驱动控制组件相连接、另一端伸出到箱体3外、回转台4设置于固定架2上、且与传动连接组件的外露端上,回转台4与固定架2之间设置有限位锁紧结构;其中组合式夹紧机构包括:四个模具5以及四个限位夹持结构,四个模具5沿环形阵列设置回转台4上,四个限位夹持结构分别设置于四个模具5的两侧位置上,在激光焊机主体1一侧设置间歇式进料机构,间歇式进料机构上设置有组合式夹紧机构,在使用时,操作人员将待焊接工件放置到模具5内,控制组合式夹紧机构对工件进行定位夹持,控制间歇式进料机构动作,将组合待焊接工件移动至激光焊机主体1的焊头下部,进行焊接作业,焊接完成后,控制间歇式进料机构动作,将下一个待焊接工件移动至激光焊机主体1内,同时控制组合式夹紧机构解除对成品工件的限制作用,并利用机械手臂26将成品工件取下,从而实现多个工位的循环间歇式进料作业,进而实现激光焊接作业的半自动化进行。
由说明书附图1-6可知,在具体实施过程中,上述驱动控制组件包括:回转电机6、减速器7以及输出轴8,回转电机6设置于箱体3内,减速器7的输入端与回转电机6的驱动端相连接,输出轴8设置于减速器7的输出端上,上述传动连接组件包括:传动控制构件以及间歇控制构件,传动控制构件设置箱体3内、且一端与输出轴8相连接,间歇控制构件设置于传动连接构件的一端上,间歇控制构件的一端伸出到箱体3外,其中传动控制构件包括:安装架9、转动轴10、蜗轮11以及蜗杆12,安装架9设置于箱体3内,转动轴10沿垂直方向转动插装于安装架9上,蜗轮11固定套装于转动轴10的下端上,蜗杆12设置于输出轴8的一端上、且与蜗轮11相啮合,其中间歇控制构件包括:转轮13、圆柱销14、连接轴15以及槽轮16,转轮13的圆心固定焊接于转动轴10的上端上,圆柱销14固定设置于转轮13上端面上,连接轴15转动插装于箱体3上端面上,连接轴15的上端与回转台4相连接,槽轮16固定套装于连接轴15的下端上,槽轮16为盘面上开设有四个U型槽的盘状结构,U型槽的尺寸与圆柱销14相匹配,在使用时,操作人员将待焊接工件放置到模具5内,通过限位夹持结构对工件进行限位固定,启动回转电机6,通过减速器7调节输出轴8的转速,输出轴8转动,继而带动蜗杆12转动,蜗杆12转动进而带动与之相啮合的蜗轮11转动,蜗轮11转动带动转动轴10进行定速转动,转动轴10转动带动其上的转轮13进行转动,转轮13转动,转轮13上的圆柱销14插入到槽轮16上的U型槽内,从而带动槽轮16转动,进而实现与槽轮16相连接的连接轴15进行转动,转轮13转动一周,槽轮16转动90°,从而实现对回转台4的定向间歇式转动控制,从而为自动给料焊接提供作业时间。
由说明书附图1-7可知,在具体实施过程中,上述限位锁紧结构包括两个气动限位组件,两个气动限位组件对称设置于固定架2侧壁上,回转台4的下端面沿圆周方向开设有四个定位盲槽,定位盲槽的尺寸与气动限位组件的尺寸相匹配,其中气动限位组件包括:固定座17、限位气缸18以及弹性插接构件,固定座17设置于固定架2侧壁上,限位气缸18设置于固定座17上、且活塞端垂直向上,弹性插接构件设置于限位气缸18的活塞端上,上述弹性插接构件包括:安装座19、弹性支撑件、连接座20以及插杆21,安装座19设置于限位气缸18的活塞端上,弹性支撑件设置于安装座19上,连接座20设置于弹性支撑件上,插杆21的一端固设于连接座20上,其中弹性支撑件包括:压缩弹簧22以及伸缩柱23,压缩弹簧22设置于安装座19以及连接座20之间、且两端分别与安装座19以及连接座20固定连接,伸缩柱23设置于压缩弹簧22内、且上下两端分别与安装座19以及连接座20固定连接,在使用时,当回转台4转动90°后,控制固定座17上的限位气缸18的活塞端扩张,从而使得安装座19上的弹性支撑件上的插杆21插入到相应的定位盲槽内,从而对回转台4进行机械限位,提高点焊作业的稳定性,同时焊接完成后,限位气缸18的活塞端迅速收缩,解除对回转台4的限位作用,同时在插杆21插入到定位盲槽的过程中,连接座20与安装座19之间的压缩弹簧22受力收缩,从而提高插杆21插入的稳定性,提高固定效果。
在具体实施过程中,上述限位夹持结构包括两个气动夹持组件,两个气动夹持组件对称设置于模具5两侧,伸缩式气动夹持组件包括:夹持气缸24以及夹块25,夹持气缸24设置于模具5一侧,夹块25设置于夹持气缸24的活塞端上,通过控制夹持气缸24的活塞端的扩张以及收缩,从而实现夹块25对工件的夹紧以及解除限位的作用,反应迅速,可靠性高。
综上所述,该激光焊接机多工位焊接工作台,在激光焊机主体1一侧设置间歇式进料机构,间歇式进料机构上设置有组合式夹紧机构,在使用时,操作人员将待焊接工件放置到模具5内,控制组合式夹紧机构对工件进行定位夹持,控制间歇式进料机构动作,将组合待焊接工件移动至激光焊机主体1的焊头下部,进行焊接作业,焊接完成后,控制间歇式进料机构动作,将下一个待焊接工件移动至激光焊机主体1内,同时控制组合式夹紧机构解除对成品工件的限制作用,并利用机械手臂26将成品工件取下,从而实现多个工位的循环间歇式进料作业,进而实现激光焊接作业的半自动化进行,解决了现有技术中,型激光焊接机大都配置单一的工作台,在实际的焊接加工作业过程中,需要工作人员不断地将工件放置在夹具上进行焊接作业,移动频次较高,劳动强度较大,不适合批量加工小型点焊式零部件,作业效率较低的问题。
上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
- 一种滑轨式双工位工作台以及双工位激光焊接机
- 一种激光焊接机多工位焊接工作台