用于弱测量技术的实时自适应相位补偿方法与系统
文献发布时间:2023-06-19 10:33:45
技术领域
本发明涉及测量技术领域,具体地,涉及一种用于弱测量技术的实时自适应相位补偿方法与系统。
背景技术
弱测量(weak measurement)理论是由物理学家Aharonov等人于1988年提出并发展起来的一项量子测量理论,它通过合适的前选择与后选择搭配获得弱值放大效应,为微弱信号的精密测量开拓了崭新的领域。进一步,我们可以在前选择与后选择之间引入合适的偏置相位,将弱测量理论从弱耦合的限制中解放出来,并总结出弱测量方法在时延测量方面的多工作区性质。在相关实验的操作中,偏置相位的选取是一项非常重要的工作。当待测时延超出线性工作区时,研究人员只能手动调节相位补偿器来对系统的偏置点进行选取。这种调节方法效率很低,且操作不易、实时性能较差,极大地限制了以弱测量为理论基础的众多测量系统的应用场景。
目前没有发现同本发明类似技术的说明或报道,也尚未收集到国内外类似的资料。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种用于弱测量技术的实时自适应相位补偿方法与系统。
根据本发明提供的根据本发明提供的一种用于弱测量技术的实时自适应相位补偿方法,包括:
弱测量步骤:进行一次弱测量,得到当前的测量值Δω
阈值判断步骤:实时地将当前测量值Δω
相位调节步骤:当测量值超出阈值时,利用自适应相位调节算法,将偏置点调回目标工作区。
较佳的,所述弱测量步骤包括:
前后选择子步骤:系统经过前选择之后,进行弱耦合作用,然后再对系统进行后选择处理;
数据处理子步骤:对经过后选择处理的系统进行测量,得到测量数据的概率分布,并对频移量进行估计,得到当前的测量值。
较佳的,所述前后选择子步骤中:
系统初态|φ>=∫dωφ(ω)|ω>,|φ(ω)|
前选择态为
相互作用的过程可以表示成
后选择态为
较佳的,所述数据处理子步骤中:
测得的频谱概率分布(非归一化)为:
P(ω)=|<ω|Ψ
归一化后:
中心频率的偏移:
较佳的,所述阈值判断步骤中:
测量值Δω
较佳的,所述相位调节步骤包括:
调零步骤:根据Δω
灵敏度判断步骤:利用频移特性曲线的线性区与非线性区在零点处灵敏度的巨大差异,对当前工作区特性做出判断;
跳相步骤:利用频移特性曲线零点等间隔的特性,周期性地调节补偿相位,直至偏置点到达目标工作区。通过费舍尔信息(Fisher Information)还能证明,线性工作区的零点可视为一个局部最佳偏置点。
根据本发明提供的一种用于弱测量技术的实时自适应相位补偿方法与系统,包括:
弱测量模块:进行一次弱测量,得到当前的测量值Δω
阈值判断模块:实时地将当前测量值Δω
相位调节模块:当测量值超出阈值时,利用自适应相位调节算法,将偏置点调回目标工作区。
较佳的,所述弱测量模块包括:
前后选择子模块:系统经过前选择之后,进行弱耦合作用,然后再对系统进行后选择处理;
数据处理子模块:对经过后选择处理的系统进行测量,得到测量数据的概率分布,并对频移量进行估计,得到当前的测量值。
所述阈值判断模块中:
测量值Δω
相位调节模块包括:
调零模块:根据Δω
灵敏度判断模块:利用频移特性曲线的线性区与非线性区在零点处灵敏度的巨大差异,对当前工作区特性做出判断;
跳相模块:利用频移特性曲线零点等间隔的特性,周期性地调节补偿相位,直至偏置点到达目标工作区。通过费舍尔信息(Fisher Information)还能证明,线性工作区的零点可视为一个局部最佳偏置点。
与现有技术相比,本发明具有如下的有益效果:
1、当待测时延超出线性工作区时,系统能通过自适应的算法实时地将偏置点调回线性区,并同时找到局部的最佳点;
2、极大地简化了实验操作,拓展了以弱测量为理论基础的众多测量系统的应用场景;
3、本发明结构合理,使用方便,能够克服现有技术的缺陷。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
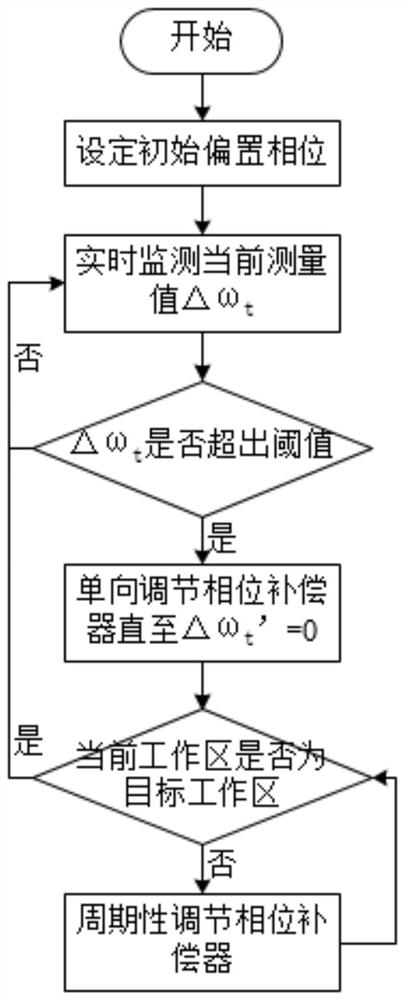
图1为本发明的整体流程示意图。
图2为本发明用于弱测量技术的实时自适应相位补偿方法与系统的原理示意图。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
如图1所示,本发明提供的一种用于弱测量技术的实时自适应相位补偿方法,包括:
弱测量步骤:进行一次弱测量,得到当前的测量值Δω
阈值判断步骤:实时地将当前测量值Δω
相位调节步骤:当测量值超出阈值时,利用自适应相位调节算法,将偏置点调回目标工作区。
其中,如图2所示,弱测量步骤包括:
前后选择子步骤:系统经过前选择1之后,进行弱耦合作用2,然后再对系统进行后选择4处理;
数据处理子步骤:对经过后选择处理的系统进行测量5,得到测量数据的概率分布,并对频移量进行估计,得到当前的测量值。
前后选择子步骤中:
系统初态|φ>=∫dωφ(ω)|ω>,|φ(ω)|
前选择态为
相互作用的过程可以表示成
后选择态为
数据处理子步骤中:
测得的频谱概率分布(非归一化)为:
P(ω)=|<ω|Ψ
归一化后:
中心频率的偏移:
阈值判断步骤中:
测量值Δω
相位调节步骤包括:
调零步骤:根据Δω
灵敏度判断步骤:利用频移特性曲线的线性区与非线性区在零点处灵敏度的巨大差异,对当前工作区特性做出判断;
跳相步骤:利用频移特性曲线零点等间隔的特性,周期性地调节补偿相位,直至偏置点到达目标工作区。通过费舍尔信息(Fisher Information)还能证明,线性工作区的零点可视为一个局部最佳偏置点。
基于上述用于弱测量技术的实时自适应相位补偿方法,本发明还提供一种用于弱测量技术的实时自适应相位补偿系统,包括:
弱测量模块:进行一次弱测量,得到当前的测量值Δω
阈值判断模块:实时地将当前测量值Δω
相位调节模块:当测量值超出阈值时,利用自适应相位调节算法,将偏置相位调回目标工作区。
较佳的,所述弱测量模块包括:
前后选择子模块:系统经过前选择之后,进行弱耦合作用,然后再对系统进行后选择处理;
数据处理子模块:对经过后选择处理的系统进行测量,得到测量数据的概率分布,并对频移量进行估计,得到当前的测量值。
所述阈值判断模块中:
测量值Δω
相位调节模块包括:
调零模块:根据Δω
灵敏度判断模块:利用频移特性曲线的线性区与非线性区在零点处灵敏度的巨大差异,对当前工作区特性做出判断;
跳相模块:利用频移特性曲线零点等间隔的特性,周期性地调节补偿相位,直至偏置点到达目标工作区。通过费舍尔信息(Fisher Information)还能证明,线性工作区的零点可视为一个局部最佳偏置点。
以下采用本发明提供的用于弱测量技术的实时自适应相位补偿方法及系统对弱测量系统进行监测,当待测时延超出线性工作区时,系统能通过自适应算法实时地对偏置点进行调整,最后使偏置点回到目标工作区,较佳的,回到局部最佳偏置点。
首先建立系统的数学模型如下:
系统初态|φ>=∫dωφ(ω)|ω>,波函数φ(ω)=(πσ
前选择态为
相互作用的过程可以表示为:
其中τ为待测时延,若考虑相位补偿器SBC(Soleil-Babinet compensator),只需将τ用τ
后选择态
系统测得的频谱概率分布(非归一化)为:
其中ε=θ
归一化后:
中心频率的偏移:
在参数估计理论中,费舍尔信息(Fisher Information)是衡量系统所能观测的待测参数的最大信息量的有力工具。
利用系统输出的归一化概率分布来计算关于τ的费舍尔信息:
由于I(τ)的表达式过于复杂,我们很难求出其极值的解析解。通过数值仿真可以看出,其费舍尔信息的极大值点与频移特性曲线在线性区的零点的相对偏差始终处于1%的级别。这也意味着在1%的相对偏差的容许条件下,可以将频移特性曲线在各线性区的零点视为局部最佳点。本自适应系统亦适用于任何仅对频移特性曲线幅值有明显影响的噪声环境,我们只需针对相应的噪声特性选取阈值即可。
令Δω=0,频移特性曲线的零点:
相邻零点间隔:
所述自适应相位调节算法的具体过程如下:
步骤1:若测量值Δω
步骤2:在调零步骤完成后,根据当前位置的灵敏度判断当前偏置点是否为目标偏置点;
步骤3:若当前偏置点不是目标偏置点,则以Δτ
步骤4:重复步骤2、3,直至回到目标偏置点。
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
在本申请的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
- 用于弱测量技术的实时自适应相位补偿方法与系统
- 用于弱测量技术的实时自适应相位补偿方法与系统