基于智能网联信息的新能源汽车滑行控制系统、方法及新能源汽车
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及新能源汽车技术,特别涉及一种基于智能网联信息的新能源汽车滑行控制系统、方法及新能源汽车。
背景技术
近几年,新能源汽车由于其良好的节能减排性能和国家政策的积极引导,逐渐成为汽车市场主流。其之所以可有效降低能耗,一方面是通过合理的能量分配策略提高能量转换效率,另一个很重要的方面是在减速运动中尽量停机滑行,并在必要的时候通过电机回收制动能量的方式给电池充电,减少能量耗损。前者已经有很多文献从各方面多角度分析,在此不再赘述,而把主要关注点放在后者。
车辆减速运动包含制动和滑行过程。制动过程中电机可通过回收制动能量提高整车经济性,但回收的同时常常伴随着机械摩擦损失,而滑行过程则可通过合理安排电机回收扭矩有效避免这部分能量流失。事实上,滑行过程中节油可发掘潜力巨大。由图1所示,三种行驶工况(全匀速、前段匀速、全滑行)在相同行驶距离内全滑行工况的燃油消耗最低。另外,相比其他节能措施,最大化滑行来避免发动机倒拖损失占据所有节能措施比例最大。据文献统计,不同工况下滑行时间最多可达35%~50%驾驶时间,滑行回收功能最大可提升12%的燃油经济性。可见滑行回收功能是新能源汽车提升经济性的重要措施之一。
然而,滑行回收功能的优势在当前策略中难以得到体现。一方面,在实际行车过程中,驾驶员常常无法决策该何时松开油门踏板以顺利滑行至前方减速区域,导致存在不必要的驱动和制动能量转换损失;另一方面,策略中并未考虑实现最大化滑行能量回收的方法,造成了部分可回收能量的流失;改善以上两方面的问题都需要车辆控制具有前瞻预测性,也就是必须得知前方的减速需求而提前做出决策,而这就离不开智能网联信息的输入。
随着智能网联技术的日益广泛应用,目前已经可通过雷达、摄像头或高精度地图等手段获取前方道路基本信息,若由这些信息判断得到前方有即将到来的减速需求,例如检测到前方有交通拥堵、障碍物、限速区域等,此时可基于已有信息及时提醒驾驶员松开油门和制动踏板,提前于驾驶员视距范围外进入滑行工况,并提前规划好优化滑行车速轨迹,在限制条件内回收滑行能量,可达到提升整车经济性的目的。
智能网联汽车,即ICV(全称Intelligent Connected Vehicle),是指车联网与智能车的有机联合,是搭载先进的车载传感器、控制器、执行器等装置,并融合现代通信与网络技术,实现车与人、车、路、后台等智能信息交换共享,实现安全、舒适、节能、高效行驶,并最终可替代人来操作的新一代汽车。中国智能网联汽车产业技术创新战略联盟,通过协同创新和技术共享,在智能网联汽车领域完善相关的标准法规体系,搭建共性技术平台,促进形成示范试点工程,推动建设可持续发展的智能网联汽车产业发展环境。
发明内容
本发明要解决的技术问题是使车辆以最节能的滑行方式行进至减速区域,避免驾驶员前段踩油门驱动后段踩刹车制动造成能耗转换损失,实现满足滑行距离和保证驾驶性的同时尽可能回收动能,提升整车续航里程,在保证驾驶性和安全性的前提下,最大体现滑行减速场景的节能潜力,有效提高车辆节能减排效果,解放驾驶员减速关注焦虑。
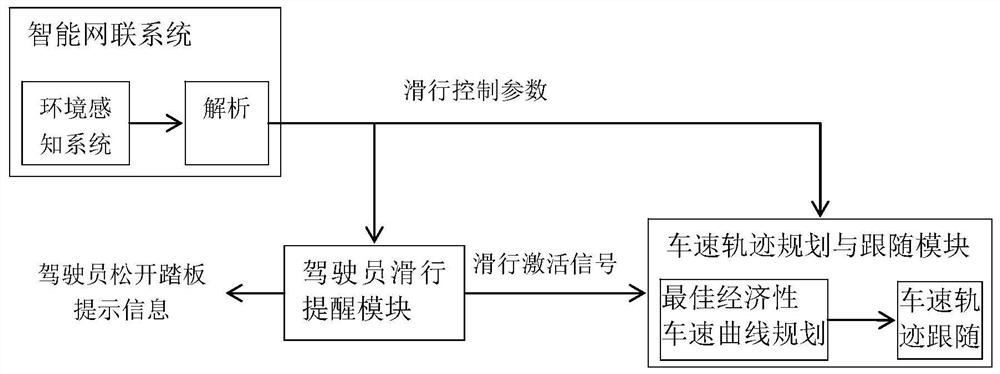
为解决上述技术问题,本发明提供的基于智能网联信息的新能源汽车滑行控制系统,其包括智能网联系统、驾驶员滑行提醒模块及车速轨迹规划与跟随模块;
智能网联系统,用于解析环境感知系统采集的智能网联信息得到滑行控制参数;滑行控制参数包括车辆到前方减速区域距离s
驾驶员滑行模块,当车辆到前方减速区域距离s
所述车速轨迹规划与跟随模块,在接收到所述滑行激活信号,并且在踏板松开后,根据优化算法规划最佳经济性车速曲线,根据所述最佳经济性车速曲线,控制车辆滑行及动能回收。
较佳的,当车辆到达前方减速区域,驾驶员滑行模块输出滑行退出信号到所述车速轨迹规划与跟随模块;
所述车速轨迹规划与跟随模块收到滑行退出信号后,退出车速轨迹规划与跟随功能。
较佳的,滑行控制参数还包括坡度角β;
式中,V
较佳的,驾驶员滑行模块,当车辆到前方减速区域距离s
较佳的,驾驶员滑行模块根据电机最大回收扭矩T
较佳的,所述驾驶员滑行模块,标定有风阻系数C
较佳的,所述驾驶员滑行模块,采用递推最小二乘法迭代计算得到车辆质量m,或者标定有车辆质量m。
较佳的,所述滚阻系数μ,先采用滑行法得到车速曲线,然后拟合成车速的二次多项式后得到。
较佳的,所述环境感知系统采集的智能网联信息包括前方交通信息、前方交通信号灯信息及导航信息。
较佳的,所述环境感知系统包含高精度雷达、高解析度摄像头、高精度地图中的至少一种。
较佳的,所述新能源汽车为混合动力汽车,并且车辆动力链结构中电机和内燃机能解耦,车辆能通过电机单独驱动;或者所述新能源汽车为纯电动汽车;
所述车速轨迹规划与跟随模块,在接收到所述滑行激活信号并且在踏板松开后,根据踏板松开时刻的当前车速V
较佳的,所述新能源汽车为混合动力汽车,并且动力链结构中电机和发动机无法脱离,所述车速轨迹规划与跟随模块,在接收到所述滑行激活信号并且在踏板松开后,规划出的最佳经济性车速曲线,以起始回收时刻为界,分为在先的纯滑行不回收阶段和在后的匀减速滑行回收阶段两个阶段;
所述车速轨迹规划与跟随模块,在纯滑行不回收阶段,控制对车辆不施加驱动力纯滑行;在匀减速滑行回收阶段,根据起始回收时刻的车速、起始回收时刻自车到前方减速区域距离、前方目标车速V
较佳的,所述车速轨迹规划与跟随模块,计算松踏板时刻车速减速到前方目标车速的时间,将该段时间按离散时间间隔T离散成多个离散时刻,再迭代计算把每个离散时刻当作起始回收时刻开始匀减速至前方目标车速的累计回收电能,将所有离散时刻中对应累计回收电能最多的离散时刻取出,作为起始回收时刻t
第k个离散时刻对应累计回收电能J
较佳的,确定起始回收时刻t
较佳的,所述设定加速度在2米/平方秒~3米/平方秒之间。
较佳的,所述环境感知系统采集的智能网联信息包括前车信息、自车信息、前方交通信息、前方交通信号灯信息及导航信息;
所述车速轨迹规划与跟随模块,在接收到所述滑行激活信号并且在踏板松开后,根据踏板松开时刻的当前车速V
较佳的,所述前车信息、自车信息均包含位置、矢量速度。
较佳的,所述车速轨迹规划与跟随模块包括MPC控制器;
所述MPC控制器选择MPC算法进行跟随控制,控制车速跟随所述最佳经济性车速曲线倒拖发动机并进行动能回收。
较佳的,所述MPC控制器包括AMPC算法模块、状态观测器、模型线性化模块;
所述状态观测器,基于卡尔曼滤波,根据电机回收扭矩实际测量输出y(k),得到一组状态变量的最优估计值
所述模型线性化模块,用于对车辆纵向动力学模型进行线性化;
所述AMPC算法模块,用于根据线性化的车辆纵向动力学模型、最佳经济性车速曲线r(i)、状态变量的最优估计值
较佳的,所述状态观测器,每个时间节点都需要利用模型预测值
式中,K为观测增益矩阵。
21.根据权利要求19所述的基于智能网联信息的新能源汽车滑行控制系统,其特征在于,
w
Δw
其中,Q为目标函数,目标轨迹r(i)为最佳经济性车速曲线,y
所述AMPC算法模块,目标函数Q选择离散模型在预测时域窗口(T
较佳的,所述模型线性化模块,在预测时域中的每个时间点处,利用泰勒展开将车辆纵向动力学模型进行线性化。
为解决上述技术问题,本发明还提供了一种基于智能网联信息的新能源汽车滑行控制方法,其通过解析智能网联系统的环境感知系统采集的智能网联信息得到滑行控制参数;滑行控制参数包括车辆到前方减速区域距离s
当车辆到前方减速区域距离s
车速轨迹规划与跟随模块在接收到所述滑行激活信号,并且在踏板松开后,根据优化算法规划最佳经济性车速曲线,根据所述最佳经济性车速曲线,控制车辆滑行及动能回收。
本发明还提供了一种配置有所述的基于智能网联信息的新能源汽车滑行控制系统的新能源汽车。
本发明,通过智能化网联功能的辅助,在驾驶员视距之外,根据前方减速场景信息自动输出驾驶员松开踏板提示信息,提早通知驾驶员可适时松开踏板进行滑行,并在松开踏板进入滑行后,自动规划跟随滑行工况下的最佳经济性车速曲线,使车辆以最节能的滑行方式行进至减速区域,避免驾驶员前段踩油门驱动后段踩刹车制动造成能耗转换损失,实现满足滑行距离和保证驾驶性的同时尽可能回收动能,提升整车续航里程,在保证驾驶性和安全性的前提下,最大体现滑行减速场景的节能潜力,有效提高车辆节能减排效果,解放驾驶员减速关注焦虑。
附图说明
为了更清楚地说明本发明的技术方案,下面对本发明所需要使用的附图作简单的介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为相同路程三种行驶工况下的油耗曲线;
图2为本发明的基于智能网联信息的新能源汽车滑行控制系统一实施例示意图;
图3为确定车速轨迹规划与跟随激活区间示意图。
具体实施方式
下面将结合附图,对本发明中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例一
如图2所示,基于智能网联信息的新能源汽车滑行控制系统包括智能网联系统、驾驶员滑行提醒模块及车速轨迹规划与跟随模块;
智能网联系统,用于解析环境感知系统采集的智能网联信息得到滑行控制参数;滑行控制参数包括车辆到前方减速区域距离s
驾驶员滑行模块,当车辆到前方减速区域距离s
所述车速轨迹规划与跟随模块,在接收到所述滑行激活信号,并且在踏板松开后,根据优化算法规划最佳经济性车速曲线,根据所述最佳经济性车速曲线,控制车辆滑行及动能回收。
较佳的,当车辆到达前方减速区域,驾驶员滑行模块输出滑行退出信号到所述车速轨迹规划与跟随模块;
所述车速轨迹规划与跟随模块收到滑行退出信号后,退出车速轨迹规划与跟随功能。
实施例一的新能源汽车滑行控制系统,通过智能化网联功能的辅助,在驾驶员视距之外,根据前方减速场景信息自动输出驾驶员松开踏板提示信息,提早通知驾驶员可适时松开踏板进行滑行,并在松开踏板进入滑行后,自动规划跟随滑行工况下的最佳经济性车速曲线,使车辆以最节能的滑行方式行进至减速区域,避免驾驶员前段踩油门驱动后段踩刹车制动造成能耗转换损失,实现满足滑行距离和保证驾驶性的同时尽可能回收动能,提升整车续航里程,在保证驾驶性和安全性的前提下,最大体现滑行减速场景的节能潜力,有效提高车辆节能减排效果,解放驾驶员减速关注焦虑。
实施例二
基于实施例一的新能源汽车滑行控制系统,滑行控制参数还包括坡度角β;
式中,V
新能源汽车滑行控制系统,其车辆模型参数估计如下:
车辆在行驶过程中的受力分为三个方向——纵向、垂向和横向,与此相对应,车辆动力学的内容主要包括驱动和制动、车辆振动和行驶的操纵稳定性。在纵向动力学当中,车辆行驶过程中的加速度由车辆驱动力与行驶阻力之差决定,车辆纵向动力学模型即:
mα=F
其中F
车辆驱动力F
坡道阻力F
滚动阻力F
空气阻力
影响以上阻力的几个重要参数包含车辆质量m、坡度角β、风阻系数C
若由当前车速V
当识别到的滑行距离s
实施例三
基于实施例二的新能源汽车滑行控制系统,驾驶员滑行模块,当车辆到前方减速区域距离s
较佳的,驾驶员滑行模块根据电机最大回收扭矩T
实施例三的新能源汽车滑行控制系统,考虑到电机回收扭矩限制以及驾驶感受差异,当自车与目标减速点距离太短时,车辆无法单纯依靠电机制动能力将车速降至目标车速以下,同时过大的减速度会引起驾驶员强烈的不适感,因此,如图3所示,只有当车辆在车速轨迹规划与跟随激活区间(车辆到前方减速区域距离s
实施例四
基于实施例三的新能源汽车滑行控制系统,所述驾驶员滑行模块,标定有风阻系数C
较佳的,所述驾驶员滑行模块,采用递推最小二乘法迭代计算得到车辆质量m,或者标定有车辆质量m。车辆质量m在行驶过程中变化不大(燃油车会随着燃油消耗降低),因此计算频率不需要太高,所以一般可以采用递推最小二乘法迭代计算得到。
较佳的,所述滚阻系数μ,先采用滑行法得到车速曲线,然后拟合成车速的二次多项式后得到。滚阻系数μ在一般城市道路或高架道路上基本不变,可先采用滑行法得到车速曲线然后拟合成车速的二次多项式后得到。
实施例四的新能源汽车滑行控制系统,风阻系数C
实施例五
基于实施例一的新能源汽车滑行控制系统,所述环境感知系统采集的智能网联信息包括前方交通信息、前方交通信号灯信息、导航信息等。
较佳的,所述环境感知系统包含高精度雷达、高解析度摄像头、高精度地图中的至少一种。
实施例五的新能源汽车滑行控制系统,智能网联系统通过解析环境感知系统采集的智能网联信息得到滑行控制参数,并将这些滑行控制参数作为功能算法所需的起始条件、应用场景以及完成条件。
实施例六
基于实施例一的新能源汽车滑行控制系统,所述新能源汽车为混合动力汽车,并且车辆动力链结构中电机和内燃机能解耦,车辆能通过电机单独驱动;或者所述新能源汽车为纯电动汽车;
所述车速轨迹规划与跟随模块,在接收到所述滑行激活信号并且在踏板松开后,根据踏板松开时刻的当前车速V
通常所说的混合动力汽车,一般是指油电混合动力汽车(Hybrid ElectricVehicle,HEV),即采用传统的内燃机(柴油机或汽油机)和电动机作为动力源,也有的发动机经过改造使用其他替代燃料,例如压缩天然气、丙烷和乙醇燃料等。
实施例六的新能源汽车滑行控制系统,针对能由电动机单独驱动的新能源汽车,考虑到减速过程中驾驶感受的一致性,其车速轨迹规划与跟随模块,根据踏板松开时刻的当前车速V
实施例七
基于实施例一的新能源汽车滑行控制系统,所述新能源汽车为混合动力汽车,并且动力链结构中电机和发动机无法脱离,所述车速轨迹规划与跟随模块,在接收到所述滑行激活信号并且在踏板松开后,规划出的最佳经济性车速曲线,以起始回收时刻为界,分为在先的纯滑行不回收阶段和在后的匀减速滑行回收阶段两个阶段;
所述车速轨迹规划与跟随模块,在纯滑行不回收阶段,控制对车辆不施加驱动力纯滑行;在匀减速滑行回收阶段,根据起始回收时刻的车速、起始回收时刻自车到前方减速区域距离、前方目标车速V
实施例八
基于实施例六的新能源汽车滑行控制系统,所述车速轨迹规划与跟随模块,计算松踏板时刻车速减速到前方目标车速的时间,将该段时间按离散时间间隔T离散成多个离散时刻,再迭代计算把每个离散时刻当作起始回收时刻开始匀减速至前方目标车速的累计回收电能,将所有离散时刻中对应累计回收电能最多的离散时刻取出,作为起始回收时刻t
第k个离散时刻对应累计回收电能J
较佳的,确定起始回收时刻t
较佳的,所述设定加速度在2米/平方秒~3米/平方秒之间。
在接收到所述滑行激活信号后,若动力链结构中电机和发动机无法脱离,以P0结构48V混合动力汽车为例,其在电机扭矩回收的过程中发动机也将被拖起并保持倒拖状态,因此必须考虑发动机被电机拖起能耗和倒拖功的损失。
为了减少发动机倒拖功的能量损失,应该尽可能晚得开始滑行回收;然而回收越晚,会造成车速下降得越慢,从而使得风阻功的累计损失变得很大,尤其是在起始车速较高的时候。因此,选择起始回收时刻需综合考虑这两方面因素来得到最大化累计回收电能;
实施例八的新能源汽车滑行控制系统,其车速轨迹规划与跟随模块,采用迭代计算的方式,计算并离散化松踏板时刻车速减速到目标车速的时间,再迭代计算在每个离散时刻开始匀减速至目标车速的累计回收电能,将所有离散时刻中对应累计回收电能最多的离散时刻取出,作为起始回收时刻t
实施例九
基于实施例一的新能源汽车滑行控制系统,所述环境感知系统采集的智能网联信息包括前车信息、自车信息、前方交通信息、前方交通信号灯信息及导航信息;
所述车速轨迹规划与跟随模块,在接收到所述滑行激活信号并且在踏板松开后,根据踏板松开时刻的当前车速V
较佳的,所述前车信息、自车信息均包含位置、矢量速度。
实施例九的新能源汽车滑行控制系统,在规划最佳经济性车速曲线时,还考虑如果进入滑行后,前方忽然有前车插入或者前车突然减速的情况,为了保证与前车保持安全距离,采集前车的车速和前车与自车距离,根据与前车距离和前车车速动态的规划最佳经济性车速曲线,并注意前车场景和常规前方限速场景之间的切换逻辑设计。
实施例十
基于实施例一的新能源汽车滑行控制系统,所述车速轨迹规划与跟随模块包括MPC控制器;
所述MPC控制器选择MPC(模型预测控制)算法进行跟随控制,控制车速跟随所述最佳经济性车速曲线倒拖发动机并进行动能回收。
实施例十的新能源汽车滑行控制系统,当车速轨迹规划完成后,控制目标变更为使整车车速轨迹良好跟随规划车速轨迹,通过选择模型预测控制(Model PredictiveControl,以下简称MPC)算法进行跟随控制,将全局优化问题转换为预测视距内的局部优化问题,降低计算负荷,以便于满足在线实时控制,而且MPC算法鲁棒性强,可在线校正由于模型失配和环境干扰导致对理想状态的偏离,轨迹跟随控制效果较好。
实施例十一
基于实施例十的新能源汽车滑行控制系统,所述MPC控制器包括自适应模型预测控制(Adaptive MPC,AMPC)算法模块、状态观测器、模型线性化模块;
所述状态观测器,基于卡尔曼滤波,根据电机回收扭矩实际测量输出y(k),得到一组状态变量的最优估计值
所述模型线性化模块,用于对车辆纵向动力学模型进行线性化;
所述AMPC算法模块,用于根据线性化的车辆纵向动力学模型、最佳经济性车速曲线r(i)、状态变量的最优估计值
实施例十一的新能源汽车滑行控制系统,车辆纵向动力学模型中的状态量同时也是可观测的电机回收扭矩实际测量输出量,为了避免测量误差和模型误差带来的影响,需要将电机回收扭矩实际测量输出y(k)测量结果进行修正及滤波。
实施例十二
基于实施例十一的新能源汽车滑行控制系统,所述状态观测器,每个时间节点都需要利用模型预测值
式中,
实施例十三
基于实施例十一的新能源汽车滑行控制系统,
w
Δw
其中,Q为目标函数,目标轨迹r(i)为最佳经济性车速曲线,y
所述AMPC算法模块,目标函数Q选择离散模型在预测时域窗口(T
实施例十四
基于实施例十一的新能源汽车滑行控制系统,所述模型线性化模块,在预测时域中的每个时间点处,利用泰勒展开将车辆纵向动力学模型进行线性化。
实施例十二的新能源汽车滑行控制系统,考虑到车辆纵向动力学模型有强烈的非线性时变特征,但非线性MPC算法在嵌入式代码开发方面远不及线性MPC算法工程应用广泛和方便,因此在求解过程中,在预测时域中的每个时间点处,利用泰勒展开将模型进行线性化。
上述新能源汽车滑行控制系统,可应用于丰富多样的减速场景中实现预测性滑行回收功能,例如前方有限速区、慢速行驶车辆、弯道、拥堵、交通灯路口等等。不同的减速场景下功能具体实现内容有些许的差异,可以针对特定的减速场景开发相应的内容即可。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明保护的范围之内。
- 基于智能网联信息的新能源汽车滑行控制系统、方法及新能源汽车
- 一种基于路况的新能源汽车滑行能量回收方法