一种对称车铣复合加工棒状试样的装置及方法
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及机械加工技术领域,尤其涉及一种对称车铣复合加工棒状试样的装置及方法。
背景技术
改革开放至今,我国的综合实力已经得到了一个质的飞跃,尤其是对于现代机械加工制造技术而言,它代表制造业的发展水平,也是整体实力的最好体现,它不但体现着工业技术水平,而且也是科学技术的表现形式。但伴随着时代的进步,各种新型材料,新的加工要求对机械加工设备及方法给出了更高的要求,同时对机械加工精度和设备可靠性以及对各类新型材料的加工要求进一步提升。以往的加工过程多数都属于大众化,无法很好的满足现代新型材料对加工效率和加工质量的切实需要,尤其材料科研类实验室对于力学试样加工质量和加工效率的要求,由于棒状力学试样加工余量较大,且一般均为细长型轴类工件,加工难度较大,表面加工质量及尺寸精度难控制,特别是对于常规棒状拉伸试样及疲劳试样等。
现在所采用的是常规车床类车削设备加工,由于单侧刀架切削且安装普通车刀,对细长的试样加工时,单侧刀具对试样切削时的侧向挤压,试样工件容易出现弯曲让刀,及工件变形,尺寸精度差等问题。并且对于不易切削加工的新型材料,造成加工效率低,表面质量差等情况:且常规车床类车削设备由于是工件回转,车刀不运动,故加工完的棒状试样表面是围绕圆周的环形刀纹,此刀纹在拉伸及疲劳的力学测试时极易产生应力集中,对测试有较大影响,无法得出材料的真实力学性能,制约了科研质量及效率。并且常规车削设备加工棒状试样时仅可使用单只车刀切削,加工效率较低,为提高棒状拉伸及疲劳试样的加工质量及效率,需通过对加工需求定制开发,契合加工生产时的定向需求。
发明内容
基于此,有必要针对上述技术问题,提供一种避免出现工件表面环状刀纹,加工过程弯曲让刀,工件变形,以及尺寸精度差等问题,且加工效率明显提升的对称车铣复合加工棒状试样的装置及方法。
本发明提供了一种对称车铣复合加工棒状试样的装置,其包括:
数控车削设备,包括工件卡盘和尾座,所述棒状试样的一端安装在所述工件卡盘上,所述棒状试样的另一端抵紧在所述尾座上;
大托板,上部安装对称设有前中置拖板组件和后中置托板组件,所述前中置拖板组件和后中置托板组件分别位于所述棒状试样的两侧;
前360度回转刀架和后360度回转刀架,分别安装在所述前中置拖板组件和后中置托板组件上,所述前360度回转刀架和后360度回转刀架上分别安装有前十字滑台和后十字滑台,所述前十字滑台和后十字滑台上分别安装有前铣削电主轴和后铣削电主轴,所述前铣削电主轴和后铣削电主轴上均安装有铣刀;所述前十字滑台和后十字滑台能够分别调节所述前铣削电主轴和后铣削电主轴的前后左右位置;
轴向进给结构,用于驱动所述大托板带动铣刀沿所述棒状试样的轴向进行移动进给;
其中,所述前中置拖板组件和后中置托板组件能够分别驱动所述前360度回转刀架和后360度回转刀架带动铣刀沿所述棒状试样的径向进行移动进给。
在其中一个实施例中,所述轴向进给结构包括进给导轨丝杆,所述进给导轨丝杆水平设置在所述数控车削设备上,且所述进给导轨丝杆与所述大托板螺纹连接。
在其中一个实施例中,所述前中置拖板组件和后中置托板组件均包括滑台、电机、丝杆和丝杆螺母;
所述大托板的上表面设有的径向导轨,所述滑台滑动设置在所述大托板的径向导轨上,所述滑台25能够沿着所述径向导轨径向靠近或远离所述棒状试样;
所述电机安装于大托板的侧面,且所述电机分别与数控系统和所述丝杆的一端相连接;
所述丝杆的另一端穿设在所述丝杆螺母中,所述丝杆螺母与滑台的底部固定连接。
在其中一个实施例中,所述前中置拖板组件和后中置托板组件沿所述棒状试样的径向最大移动距离均小于所述工件卡盘最大夹持直径的一半。
在其中一个实施例中,所述前中置拖板组件和后中置托板组件的径向长度均分别大于所述前360度回转刀架和后360度回转刀架的径向长度,并小于所述径向导轨的一半长度,以及,所述前中置拖板组件和后中置托板组件的轴向宽度不大于所述大托板的轴向宽度。
在其中一个实施例中,所述前360度回转刀架包括前刀架回转主体和前回转传动电机,所述后360度回转刀架包括后刀架回转主体和后回转传动电机,所述前刀架回转主体和后刀架回转主体分别安装在所述前中置拖板组件和后中置托板组件上,且所述前刀架回转主体和后刀架回转主体上表面分别安装有前十字滑台和后十字滑台;
所述前回转传动电机和所述后回转传动电机与所述数控系统相连接;所述前回转传动电机和所述后回转传动电机用于驱动所述前十字滑台和后十字滑台相对于所述前刀架回转主体和后刀架回转主体在水平面内转动。
在其中一个实施例中,所述前十字滑台和后十字滑台均包括上滑台和下滑台,所述上滑台可相对于所述下滑台在沿着所述棒状试样的轴线和径向滑动,且所述上滑台和下滑台之间分别通过横向调节螺丝和径向调节螺丝进行横向和径向的位置锁紧。
在其中一个实施例中,所述前铣削电主轴包括依次连接的前铣削电主轴电机、前主轴和前铣刀夹头,所述后铣削电主轴包括依次连接的后铣削电主轴电机、后主轴和后铣刀夹头,所述前铣削电主轴和后铣削电主轴采用高转速铣削电主轴电机,所述前铣刀夹头和后铣刀夹头用于安装所述铣刀。
此外,本发明还提供了一种使用对称车铣复合加工棒状试样的装置的方法,其包括以下步骤:
S1、将棒状试样的一端安装于数控车削设备的工件卡盘上,棒状试样的另一端用尾座顶固;
S2、安装铣刀,微调前十字滑台和后十字滑台进行棒状试样的径向对刀,接着,调节前十字滑台和后十字滑台进行棒状试样的轴向对刀,使得所述棒状试样两侧的铣刀对称均匀接触其待加工表面;
S3、在数控系统中编制棒状试样的加工程序,确定轴向和径向的进给参数,设置前铣削电主轴电机和后铣削电主轴电机的转速,设置工件卡盘转速,使得前铣削电主轴电机和后铣削电主轴电机的转速一定范围倍数高于工件卡盘的转速;
S4、前铣削电主轴和后铣削电主轴同时启动,按照编制好的加工程序轨迹对棒状试样进行车铣复合加工。
上述对称车铣复合加工棒状试样的装置及方法,通过在数控车削设备上对称设置铣刀,利用数控车削设备带动棒状试样转动,以及铣刀自转进行车铣复合加工棒状试样,使棒状试样对称平衡受力,解决了细长试样工件使用常规数控车削设备加工时,出现弯曲让刀,工件变形,以及尺寸精度差等问题,且加工效率明显提升,同时,通过对铣刀和棒状试样的转速调节,使前铣削电主轴和后铣削电主轴转速一定范围倍数高于车削设备主轴转速,从而棒状试样加工后的表面是铣刀切削时的弧形切削纹路,避免了常规车削设备加工棒状试样时,产生的环状切削刀纹造成试样测试时应力集中,对测试结果的影响。其还具有搭建简易、操作简单、可对多种形式棒状试样及细长轴类工件进行对称车铣复合加工的优点。
附图说明
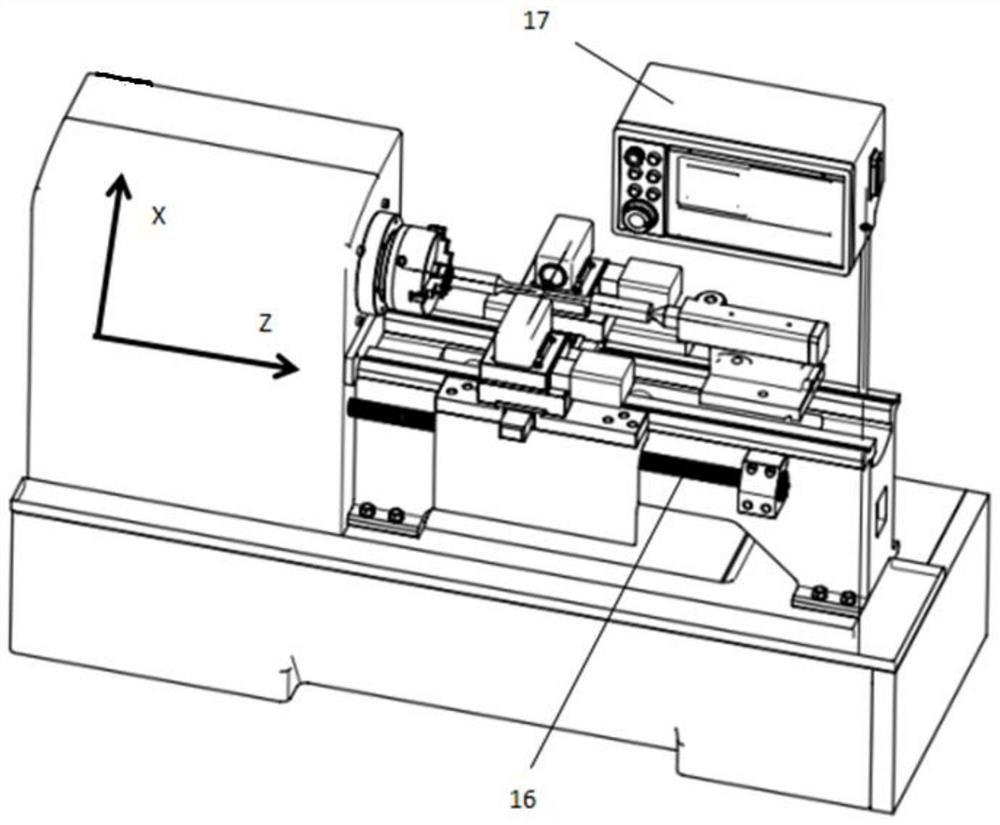
图1是本发明的对称车铣复合加工棒状试样的装置的使用状态图;
图2是本发明的对称车铣复合加工棒状试样的装置的局部结构示意图;
图3是本发明的对称车铣复合加工棒状试样的装置的俯视图;
图4是本发明的对称车铣复合加工棒状试样的装置的前中置拖板组件的结构示意图;
图5是本发明的对称车铣复合加工棒状试样的装置的前十字滑台或后十字滑台的结构示意图;
图6是本发明的对称车铣复合加工棒状试样的装置的工件卡盘的最大夹持直径的状态图;
图7是本发明的对称车铣复合加工棒状试样的装置的前360度回转刀架和后360度回转刀架的安装位置图;
图8是本发明的对称车铣复合加工棒状试样的装置的大托板的结构示意图;
图9是本发明的对称车铣复合加工棒状试样的装置的棒状试样的结构示意图。
具体实施方式
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的较佳的实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容的理解更加透彻全面。
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
本发明中,为方便描述,假设以平行棒状试样22的轴线方向为Z向(横向),以水平面内垂直棒状试样22的轴线方向为X向(径向)。
参阅图1-9所示,本发明一实施例提供一种对称车铣复合加工棒状试样的装置,包括数控车削设备、大托板1、前360度回转刀架、后360度回转刀架和轴向进给结构。
具体地,数控车削设备包括工件卡盘18和尾座19,所述棒状试样22的一端安装在所述工件卡盘18上,所述棒状试样22的另一端抵紧在所述尾座19上;
可选地,大托板1的上部安装对称设有前中置拖板组件2和后中置托板组件3,所述前中置拖板组件2和后中置托板组件3分别位于所述棒状试样22的两侧;
前360度回转刀架和后360度回转刀架分别安装在所述前中置拖板组件2和后中置托板组件3上,所述前360度回转刀架和后360度回转刀架上分别安装有前十字滑台8和后十字滑台9,所述前十字滑台8和后十字滑台9上均安装有前铣削电主轴和后铣削电主轴,所述前铣削电主轴和后铣削电主轴上均安装有铣刀;所述前十字滑台8和后十字滑台9能够分别调节所述前铣削电主轴和后铣削电主轴的前后左右位置;
轴向进给结构用于驱动所述大托板1带动铣刀沿所述棒状试样的轴向进行移动进给;所述前中置拖板组件2和后中置托板组件3能够分别驱动所述前360度回转刀架和后360度回转刀架带动铣刀沿所述棒状试样22的径向进行移动进给。
在本发明的一实施例中,所述轴向进给结构包括进给导轨丝杆16,所述进给导轨丝杆16水平设置在所述数控车削设备上,且所述进给导轨丝杆16与所述大托板1螺纹连接。具体地,导轨丝杆16一端可与驱动电机相连接,导轨丝杆16的另一端可旋转地固定在数控车削设备上,当驱动电机驱动导轨丝杆16转动时,即可带动大托板1沿着Z向进行移动。
在本发明的一实施例中,所述前中置拖板组件2和后中置托板组件3均包括滑台25、电机26、丝杆27和丝杆螺母28;
具体地,所述大托板1的上表面设有的径向导轨30,所述滑台25滑动设置在所述径向导轨30上,所述滑台25能够沿着所述径向导轨30径向靠近或远离所述棒状试样22;即滑台25受到径向导轨30的位置约束,使得滑台25可沿X向进行前后运动。
进一步地,所述电机26安装于大托板1的侧面,例如:将电机26的安装孔与大托板1侧面用螺丝固定,且所述电机26分别与数控系统17和所述丝杆27的一端相连接;所述丝杆27的另一端穿设在所述丝杆螺母28中,所述丝杆螺母28与滑台25的底部固定连接。本发明中,电机26可驱动丝杆27旋转,进而带动滑台25沿着径向导轨30进行前后运动。
进一步地,所述前中置拖板组件2和后中置托板组件3沿所述棒状试样22的径向最大移动距离均小于所述工件卡盘18最大夹持直径的一半。这样可以对前中置拖板组件2和后中置托板组件3的径向移动进行限位,避免夹断棒状试样22。
可选地,为了提高安全性,所述前中置拖板组件2和后中置托板组件3的径向长度均分别大于所述前360度回转刀架和后360度回转刀架的径向长度,并小于所述径向导轨30的一半长度,以及,所述前中置拖板组件2和后中置托板组件3的轴向宽度不大于所述大托板1的轴向宽度。
本发明的所述前360度回转刀架包括前刀架回转主体6和前回转传动电机4,所述后360度回转刀架包括后刀架回转主体7和后回转传动电机5,所述前刀架回转主体6和后刀架回转主体7分别安装在所述前中置拖板组件2和后中置托板组件3上,且所述前刀架回转主体6和后刀架回转主体7上表面分别安装有前十字滑台8和后十字滑台9;
所述前回转传动电机4和所述后回转传动电机5与所述数控系统17相连接;所述前回转传动电机4和所述后回转传动电机5用于驱动所述前十字滑台8和后十字滑台9相对于所述前刀架回转主体6和后刀架回转主体7在水平面内转动。
所述前十字滑台8和后十字滑台9均包括上滑台和下滑台,所述上滑台可相对于所述下滑台在沿着所述棒状试样22的轴线和径向滑动,且所述上滑台和下滑台之间分别通过横向调节螺丝23和径向调节螺丝24进行横向和径向的位置锁紧。
进一步地,所述前铣削电主轴包括依次连接的前铣削电主轴电机10、前主轴12和前铣刀夹头14,所述后铣削电主轴包括依次连接的后铣削电主轴电机11、后主轴13和后铣刀夹头15,所述前铣刀夹头14和后铣刀夹头15用于安装所述铣刀。本发明实施例中,前铣刀夹头14和后铣刀夹头15是相对设置在所述棒状试样22的前后两侧,前铣削电主轴电机10通过前主轴12带动前铣刀夹头14上的铣刀旋转,后铣削电主轴电机11通过后动力头主轴13带动后铣刀夹头15上的铣刀旋转,从而实现棒状试样22的铣削。
本发明的一实施例中,对称车铣复合加工棒状试样的使用方法,包括以下步骤:
S1、将棒状试样22的一端安装于数控车削设备的工件卡盘18上,棒状试样22的另一端用尾座19顶固;
S2、安装铣刀,微调前十字滑台8和后十字滑台9进行棒状试样22的径向对刀,接着,调节前十字滑台8和后十字滑台9进行棒状试样22的轴向对刀,使得所述棒状试样22两侧的铣刀对称均匀接触其待加工表面;具体地,微调前十字滑台8和后十字滑台9的轴向(Z向)参数包括:通过铣刀接触棒状试样22的端面进行Z向对刀,使前动力头主轴12和后动力头主轴13的回转中心轴线在同一轴线,并对称均匀接触棒状试样22,并通过铣刀接触棒状试样22的外圆进行X向对刀,调节十字滑台的X向参数,使得棒状试样22两侧的铣刀对称均匀接触棒状试样22。
S3、在数控系统17中编制棒状试样22的加工程序,确定轴向和径向的进给参数,设置前铣削电主轴和后铣削电主轴的转速;具体地,以棒状试样22的外圆轮廓为大拖板1、前中置拖板组件2和后中置托板组件3的加工程序循环行走轨迹,确定大拖板1、前中置拖板组件2和后中置托板组件3的X向和Z向进给参数,以前中置拖板组件2和后中置托板组件3的X向进给参数为每刀循环的X向进给量,并设置好棒状试样22的主轴转速,X向每刀循环进给量,Z向进给量设置每转进给量,前铣削电主轴和后铣削电主轴转速,为了提高表面质量,避免加工完的棒状试样表面出现环形刀纹,造成测试时产生应力集中,前铣削电主轴和后铣削电主轴转速一定范围倍数高于车削设备主轴转速,以《金属材料疲劳试验轴向力控制方法标准》(GB/T15248-94)推荐棒状试样尺寸为例,常用设置为前铣削电主轴和后铣削电主轴转速2-50倍于车削设备主轴转速。
S4、工件卡盘18与铣刀同时启动,按照编制好的加工程序轨迹对棒状试样22进行车铣复合加工。具体地,程序启动,大拖板1、前中置拖板组件2和后中置托板组件3移动至棒状试样22,前中置拖板组件2和后中置托板组件3的进给至程序预设位置,使得前铣刀夹头14和后铣刀夹头15上安装的铣刀左右对称接触棒状试样22,并按照编制好的加工程序轨迹对棒状试样22进行X向和Z向进给,实现对称车铣复合加工。
实施例一:
选用新型TiB
1).材料选用直径20mm,长度170mm圆棒料,将棒状试样22毛坯一端安装于数控车削设备工件卡盘18上,另一端用车削设备尾座19顶固。
2).在前铣刀夹头14上安装合适铣刀,铣刀选用直径5mm,总长40mm,刃长15mm的圆鼻双刃球头铣刀,微调前十字滑台8的Z向参数,通过铣刀接触棒状试样22端面进行Z向对刀,使前动力头主轴12均匀接触棒状试样22,并通过铣刀接触棒状试样22外圆进行X向对刀,调节前十字滑台8X向参数,使得前铣刀夹头14的铣刀均匀接触棒状试样22。
3).在数控系统17中编制加工程序,以棒状试样22外圆轮廓为大拖板1、前中置拖板组件2的加工程序循环行走轨迹,确定大拖板1、前中置拖板组件2的X向和Z向进给参数,以前中置拖板组件2的X向进给参数为每刀循环进给量,棒状试样22的主轴设置转速每分钟100转,前铣削电主轴设置转速每分钟400转,X向每刀循环进给量设置每刀进给1mm,Z向进给量设置每转进给0.3mm,前铣削电主轴12启动,程序启动,大拖板1、前中置拖板组件2移动至棒状试样22,前中置拖板组件2进给至程序所预设的位置,使得前铣刀夹头14上安装的铣刀接触棒状试样22,并按照编制好的加工程序轨迹对棒状试样22进行X向和Z向进给,实现对称车铣复合加工。
对加工过程中的棒状试样22状态观察评估,棒状试样22加工过程中因前铣削电主轴与棒状试样22的转速均较慢,转速搭配不合适,且未使用左右对称平衡切削对试样工件车铣复合加工,单侧刀具对试样工件挤压,加工过程中出现轻微让刀现象,加工后的棒状试样22表面质量一般,并对棒状试样22平行段尺寸进行测量,38mm长度平行段误差0.05mm。
实施例二:
继续选用新型TiB
1).材料选用直径20mm,长度170mm圆棒料,将棒状试样22毛坯一端安装于数控车削设备工件卡盘18上,另一端用车削设备尾座19顶固。
2).在前铣刀夹头14和后铣刀夹头15上安装合适铣刀,铣刀选用直径5mm,总长40mm,刃长15mm的圆鼻双刃球头铣刀,微调前十字滑台8和后十字滑台9的Z向参数,补偿实施例一的刀具Z向磨损量,通过铣刀接触棒状试样22端面进行Z向对刀,使前动力头主轴12和后动力头主轴13的回转中心轴线21在同一轴线,并对称均匀接触棒状试样22,并通过铣刀接触棒状试样22外圆进行X向对刀,调节前十字滑台8和后十字滑台9的X向参数,补偿实施例一的刀具X向磨损量,使得前铣刀夹头14和后铣刀夹头15的铣刀对称均匀接触棒状试样22。
3).在数控系统17中编制加工程序,以棒状试样22外圆轮廓为大拖板1、前中置拖板组件2和后中置托板组件3的加工程序循环行走轨迹,确定大拖板1、前中置拖板组件2和后中置托板组件3的X向和Z向进给参数,以前中置拖板组件2和后中置托板组件3的X向进给参数为每刀循环进给量,棒状试样22的主轴设置转速每分钟800转,前铣削电主轴和后铣削电主轴设置转速每分钟5000转,X向每刀循环进给量设置每刀进给1mm,Z向进给量设置每转进给0.3mm,棒状试样22的回转主轴、前铣削电主轴和后铣削电主轴同时启动,程序启动,大拖板1、前中置拖板组件2和后中置托板组件3移动至棒状试样22,前中置拖板组件2和后中置托板组件3的进给至程序所预设的位置,使得前铣刀夹头14和后铣刀夹头15上安装的铣刀左右对称接触棒状试样22,并按照编制好的加工程序轨迹对棒状试样22进行X向和Z向进给,实现对称车铣复合加工。
对加工过程中的棒状试样22状态观察评估,前铣削电主轴和后铣削电主轴可实现5000-20000转的使用转速,使用每分钟5000转的转速即可得到加工后的棒状试样22优秀的表面质量,因前铣削电主轴和后铣削电主轴位于棒状试样两侧,左右对称平衡切削,棒状试样22加工过程中未出现让刀现象,并对加工后棒状试样22平行段尺寸进行测量,38mm长度平行段误差低于0.005mm,且前铣削电主轴和后铣削电主轴所安装铣刀高速自转,形成车铣复合,大幅提高加工效率,降低刀具磨损。
实施例三:
选用新型TiB
1).材料选用直径20mm,长度170mm圆棒料,将棒状试样22毛坯一端安装于数控车削设备工件卡盘18上,另一端用车削设备尾座19顶固。
2).在前铣刀夹头14和后铣刀夹头15上安装合适铣刀,铣刀选用直径5mm,总长40mm,刃长15mm的圆鼻双刃球头铣刀,微调前十字滑台8和后十字滑台9的Z向参数,通过铣刀接触棒状试样22端面进行Z向对刀,使前动力头主轴12和后动力头主轴13的回转中心轴线21在同一轴线,并对称均匀接触棒状试样22,并通过铣刀接触棒状试样22外圆进行X向对刀,调节前十字滑台8和后十字滑台9的X向参数,使得前铣刀夹头14和后铣刀夹头15的铣刀对称均匀接触棒状试样22。
3).在数控系统17中编制加工程序,以棒状试样22外圆轮廓为大拖板1、前中置拖板组件2和后中置托板组件3的加工程序循环行走轨迹,确定大拖板1、前中置拖板组件2和后中置托板组件3的X向和Z向进给参数,以前中置拖板组件2和后中置托板组件3的X向进给参数为每刀循环进给量,棒状试样工件22主轴设置转速每分钟2000转,前铣削电主轴和后铣削电主轴设置转速每分钟2000转,X向每刀循环进给量设置每刀进给1mm,Z向进给量设置每转进给0.3mm,棒状试样22的回转主轴、前动力头主轴12和后动力头主轴13同时启动,程序启动,大拖板1、前中置拖板组件2和后中置托板组件3移动至棒状试样22,前中置拖板组件2和后中置托板组件3的进给至程序所预设的位置,使得前铣刀夹头14和后铣刀夹头15上安装的铣刀左右对称接触棒状试样22,并按照编制好的加工程序轨迹对棒状试样22进行X向和Z向进给,实现对称车铣复合加工。
对加工过程中的棒状试样22状态观察评估,棒状试样22加工过程中虽未出现让刀现象,但因前铣削电主轴和后铣削电主轴与棒状试样22的主轴转速搭配不合适,未使前铣削电主轴和后铣削电主轴转速2-50倍于车削设备主轴转速,加工后的棒状试样表面出现轻微环状刀纹,造成样品测试时应力集中。
实施例四:
继续选用新型TiB
1).材料选用直径20mm,长度170mm圆棒料,将棒状试样22毛坯一端安装于数控车削设备工件卡盘18上,另一端用车削设备尾座19顶固。
2).在前铣刀夹头14和后铣刀夹头15上安装合适铣刀,铣刀选用直径5mm,总长40mm,刃长15mm的圆鼻双刃球头铣刀,微调前十字滑台8和后十字滑台9的Z向参数,通过铣刀接触棒状试样22端面进行Z向对刀,使前铣削电主轴和后铣削电主轴的回转中心轴线21在同一轴线,并对称均匀接触棒状试样22,并通过铣刀接触棒状试样22外圆进行X向对刀,调节前十字滑台8和后十字滑台9的X向参数,使得前铣刀夹头14和后铣刀夹头15的铣刀对称均匀接触棒状试样22。
3).在数控系统17中编制加工程序,以棒状试样22外圆轮廓为大拖板1、前中置拖板组件2和后中置托板组件3的加工程序循环行走轨迹,确定大拖板1、前中置拖板组件2和后中置托板组件3的X向和Z向进给参数,以前中置拖板组件2和后中置托板组件3的X向进给参数为每刀循环进给量,棒状试样工件22主轴设置转速每分钟1000转,前铣削电主轴和后铣削电主轴设置转速每分钟6000转,X向每刀循环进给量设置每刀进给1mm,Z向进给量设置每转进给0.3mm,棒状试样22的回转主轴、前动力头主轴12和后动力头主轴13同时启动,程序启动,大拖板1、前中置拖板组件2和后中置托板组件3移动至棒状试样22,前中置拖板组件2和后中置托板组件3的进给至程序所预设的位置,使得前铣刀夹头14和后铣刀夹头15上安装的铣刀左右对称接触棒状试样22,并按照编制好的加工程序轨迹对棒状试样22进行X向和Z向进给,实现对称车铣复合加工。
调整了前铣削电主轴和后铣削电主轴转速,使前铣削电主轴和后铣削电主轴的转速六倍于棒状试样22的主轴转速,对加工过程中的棒状试样22状态观察评估,棒状试样22加工过程中未出现让刀现象,加工后的棒状试样22表面质量优秀,未出现环状刀纹,并对棒状试样22平行段尺寸进行测量,38mm长度平行段误差低于0.005mm,且刀具无明显磨损。
在上述的一些实施例中,通过对两组新型铝基复合材料加工,针对材料特性微调加工方法及参数,加工后的表面质量,尺寸精度等,均达到理想效果,且细长棒状试样22变形让刀情况明显改善。
综上,本发明的优点在于:
1.在一些实施例中,通过在前中置拖板组件2和后中置托板组件3上,分别安装前铣削电主轴和后铣削电主轴,使前铣削电主轴和后铣削电主轴的回转中心在同一轴线,对细长轴类试样进行左右平衡对称X向和Z向进给车铣复合加工,使试样工件左右对称受力,从而有效解决了细长轴类试样工件用常规车削设备加工时,单侧刀具对试样工件挤压,造成让刀及试样工件变形,尺寸精度差等问题。
2.在一些实施例中,通过铣刀可沿着X向或Z向进给车削,且铣刀自转也可自行铣削,形成车铣复合加工,因此可加大进给深度及进给速度,相比于常规车削设备对棒状试样加工时,由于车削刀具不做自转运动,仅可对试样进行X向或Z向的车削,从而使用车铣复合加工试样的加工效率大幅提高。
3.在一些实施例中,通过对棒状试样加工时,提高铣削电主轴铣削速度,降低试样工件旋转速度,使得前铣削电主轴和后铣削电主轴转速一定范围倍数高于车削设备主轴转速,因此试样加工后的表面可得到铣刀切削时的弧形切削纹路,从而避免了常规车削设备加工棒状试样时,产生的环状切削刀纹造成应力集中,对测试结果的影响。
4.在一些实施例中,通过前十字滑台和后十字滑台可以手工微调前铣削电主轴和后铣削电主轴的X向和Z向参数,解决对刀及铣刀磨损补偿,使得前铣削电主轴和后铣削电主轴上安装的铣刀对称均匀接触试样工件,保证加工过程中的尺寸一致性及尺寸稳定性,此方法操作简单,使用方便。
5.在一些实施例中,通过前铣削电主轴和后铣削电主轴的左右对称平衡,对试样工件车铣复合加工,由于前铣削电主轴和后铣削电主轴采用高转速铣削电主轴电机,铣削加工时,转速可轻松提升至每分钟5000-20000转,从而解决了普通车削设备加工时,较低的极限转速车削,加工完的粗刀纹对试样表面光洁度的影响,因此车铣复合加工后得到的试样表面光洁度明显提升,试样平行段尺寸精度明显改善。
6.在一些实施例中,在现有的常规数控车削设备上即可搭载此对称车铣复合加工装置,仅需对设备简单改装,搭建简易,操作简单,并可对多种形式棒状试样及细长轴类工件进行对称车铣复合加工。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,但并不能因此而理解为对本申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 一种对称车铣复合加工棒状试样的装置及方法
- 车铣复合进给装置,车铣复合机床及其加工方法