一种光电检测器及其光电触摸定位的方法
文献发布时间:2023-06-19 11:02:01
技术领域
本发明涉及触摸定位技术领域,具体而言,涉及一种光电检测器及其光电触摸定位的方法。
背景技术
目前,触摸屏作为最为轻松的人机交互技术已经被推向众多领域。在基于光电技术的触摸屏实现方案中,最成熟的一种是在屏幕四边排布红外发射管和红外接收管,一一对应形成横竖交叉的红外线矩阵,根据遮蔽光线的不同可以检测出触摸物的具体位置,适用范围很广。但,要对触摸点形成有效的判断,必须在触摸框四周都排布红外发射管和红外接收管,结构比较复杂且实现成本较高;
此外,现有技术中也有通过光扫描来实现触摸定位,例如公开号为CN109992164A的发明专利激光扫描触摸屏公开了如下内容,包括至少两个激光扫描头,激光扫描头包括一基座,基座上设置有一反射式感应组和一旋转机构;还设有一旋转角度检测装置,转动部件与旋转角度检测装置联动;基座还设有光敏接收头;基座上的转动部件带动激光发射头旋转,进而带动激光发射头发射出的激光光束旋转;在激光发射头旋转过程中,激光光束照射到触摸件时,会产生反射,确定触摸件的其中一维坐标的参数;通过至少两个激光扫描头,分别确定触摸件的一维坐标,进而确定出至少两维坐标,进而确定出触摸件位于触摸屏上的坐标位置。
但,该技术至少具有以下几点缺陷:(1)由于光敏二极管的接收灵敏度高低是有方向性的,入射光线偏离光敏二极管的中心轴线会导致接收灵敏度下降,同时随着触摸件坐标离接收光敏器件距离越远反射光亮强度越弱。同时触摸屏上的指示物并不是总在激光扫描光束的光轴上,由于反射光的方向是由指示物的法线决定的,所以反射光也不总是返回出射点,因此,反射光的接收会存在接收盲区;(2)通过码盘进行角度测量,会由于在物理圆盘上标定刻度,刻度的分辨率受圆盘面积限制,导致码盘测量角度的分辨率低,进而影响显示屏触摸定位精度;(3)码盘高速运转的机械驱动会影响到高速旋转性能,且由于码盘是物理圆盘,受码盘刻度精度要求,需要较大尺寸,但直径越大高速旋转产生的电磁噪声越大,造成电磁干扰,影响使用体验。
发明内容
基于此,针对上述问题,有必要提出一种通用性强,适用于各种尺寸显示屏的光电检测器以及通过该光电检测器实现显示屏无盲区、低电磁噪声、高精度的触摸定位的方法。
本发明的实施例通过以下技术方案实现:一种光电检测器,包括:
光扫描机构,用以发射一条光束扫描显示屏的触摸区域;
信息处理电路,其电性连接所述光扫描机构;
至少两个检测单元,设于所述显示屏的一侧,均与所述信息处理电路电性连接,用以检测所述光扫描机构光束轨迹的光点;
其中,所述信息处理电路包括计时单元,所述计时单元用以获取所述光点对应的时间当量,进而确定光束恒速旋转的角弧度,进而确定显示屏上触摸件检测到的光点对应的坐标位置。
进一步的,所述光扫描机构包括:
用以产生入射光束的发光源;
用以反射所述入射光束的光学元件;和
用以驱动所述光学元件旋转的马达。
根据一种优选实施方式,所述至少两个检测单元包括过零检测单元和量程定位单元,其中,
所述过零检测单元设于所述光学元件上光束入射点的同一水平线上,用以检测所述光束轨迹的光点,确定光扫描一周的起止点。
进一步的,所述信息处理电路还包括:第一前置放大单元、第二前置放大单元、时钟单元、逻辑控制/计算单元、RAM单元、射频信号收发单元、接口单元以及驱动单元,其中,
所述第一前置放大单元输入端与所述过零检测单元连接,输出端与所述计时单元连接,用以通过所述计时单元获取所述光扫描的起始时间;
所述第二前置放大单元输入端与所述量程定位单元连接,输出端与所述计时单元连接,用以通过所述计时单元获取所述光扫描的第一时间当量;
所述时钟单元第一输出端连接所述计时单元,用以提供计时脉冲;第二输出端连接所述逻辑控制/计算单元,用以提供时序时钟;
所述驱动单元一端连接所述马达和发光源,另一端连接所述逻辑控制/计算单元;
所述RAM单元、射频信号收发单元以及接口单元均与所述逻辑控制/计算单元连接,其中,
所述RAM单元用以缓存所述逻辑控制/计算单元控制过程数据,所述射频信号收发单元与所述触摸件射频通信,所述接口单元连接至显示屏的主计算机。
根据一种优选实施方式,所述计时单元包括第一计时器、第二计时器、第三计时器以及第四计时器,其中,
所述第一计时器与所述第一前置放大单元连接,用以获取光束旋转一周的时间当量;
所述第二计时器与所述第二前置放大单元连接,用以获取光束从所述过零检测单元到达所述量程定位单元的所述第一时间当量;
所述第三计时器与所述逻辑控制/计算单元连接,用以获取光束从所述过零检测单元到达另一光电检测器对应的量程定位单元的第二时间当量;
所述第四计时器与所述逻辑控制/计算单元连接,用以获取光束从所述过零检测单元到达所述触摸件的第三时间当量。
本发明还提供一种光电触摸定位的方法,应用到如上述所述的光电检测器,包括如下步骤:
对于显示器的图像像素区域,交替使用第一光电检测器和第二光电检测器进行两个坐标系的光束扫描,
所述两个坐标系包括经第一光电检测器的光扫描机构发射的光束轨迹经过零检测单元、量程定位单元、触摸件以及第二光电检测器的量程定位单元各光点而生成的第一坐标系,以及经第二光电检测器的光扫描机构发射的光束轨迹经过零检测单元、量程定位单元、触摸件以及第一光电检测器的量程定位单元各光点而生成的第二坐标系;
通过计时单元分别对光束轨迹经过零检测单元到上述各光点的时间进行累计,获取各光点对应的时间当量,进而确定光束恒速旋转的角弧度;
将第一坐标和第二坐标进行整合,根据三角函数计算出显示屏上触摸件对应光点的坐标值。
进一步的,所述通过计时单元分别对光束轨迹经过零检测单元到上述各光点的时间进行累计,获取各光点对应的时间当量,进而确定光束恒速旋转的角弧度具体包括:
当第一光电检测器发出的光束到达过零检测单元时,所述过零检测单元产生光电脉冲发送至所述计时单元,启动各计时器开始计时;
当光束到达量程定位单元时,所述量程定位单元产生光电脉冲发送至所述计时单元,控制第二计时器停止计时,获得第一时间当量t
当光束到达触摸件时,触摸件产生光电脉冲发送至所述计时单元,控制第四计时器停止计时,获得第三时间当量t
当光束到达第二光电检测器的量程定位单元时,该量程定位单元产生光电脉冲至所述第一光电检测器的计时单元,控制第三计时器停止计时,获得第二时间当量t
当光束旋转一周到达所述第一光电检测器的过零检测单元时,所述过零检测单元产生光电脉冲发送至所述计时单元,控制第一计时器停止计时,获得光扫描一周的时间当量t
计算角弧度的公式如下:
式(1)中,t为时间当量,t
根据一种优选实施方式,在获取时间当量t
读取并缓存所述第一计时器、第二计时器、第三计时器和第四计时器的数据,同时复位所述第一计时器、第二计时器、第三计时器和第四计时器;
控制进行中的光电检测器中止光束发射,启动另一光电检测器。
根据一种优选实施方式,在计算触摸件在显示屏上对应光点的坐标值之前还包括:
获取图像像素区域的像素分辨率值,基于所述像素分辨率值确定两个所述量程定位单元之间连线的长度当量,同时获取两个所述量程定位单元之间连线与触摸区域一边框的角度。
本发明实施例的技术方案至少具有如下优点和有益效果:本发明的光电检测器通过发光源、马达以及固定在马达一端的光学元件来发射光束,能够避免显示屏触摸区域出现扫描盲区,且在使用过程中电磁噪声小,电磁干扰现象弱;光电检测器发射光束扫描显示屏触摸区域,两个光电检测器的光束轨迹经过过零检测单元、量程定位单元以及触摸件经逻辑控制/计算单元获取两个坐标系;基于光电检测器的计时单元,获取各光点的时间当量,进而确定光束恒速旋转的角弧度;将第一坐标和第二坐标进行整合,根据三角函数计算出显示屏上触摸件对应光点的坐标值,即能够高精度的实现触摸定位。
附图说明
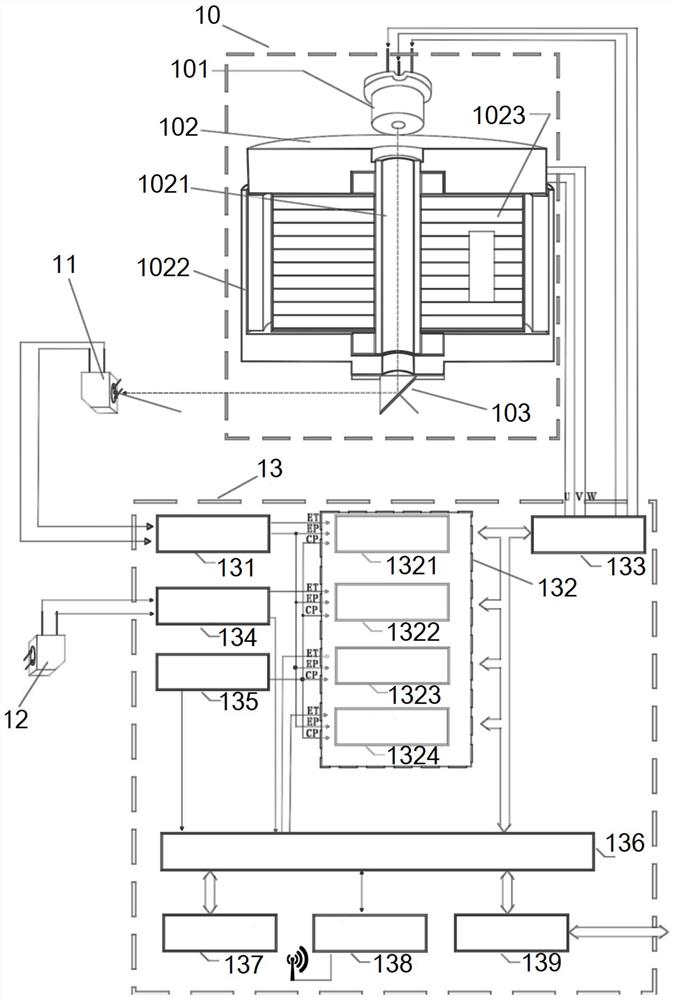
图1为本发明实施例提供的光电检测器的结构示意图;
图2为本发明实施例提供的光电触摸定位的方法的逻辑流程图;
图3为本发明实施例提供的逻辑控制/计算单元控制时序流程图;
图4为本发明实施例提供的坐标整合结果示意图;
图标:10-光扫描机构,101-发光源,102-马达,1021-空心主轴,1022-转子,1023-定子线圈,103-光学元件,11-过零检测单元,12-量程定位单元,13-信息处理电路,131-第一前置放大单元,132-计时单元,1321-第一计时器,1322-第二计时器,1323-第三计时器,1324-第四计时器,133-驱动单元,134-第二前置放大单元,135-时钟单元,136-逻辑控制/计算单元,137-RAM单元,138-射频信号收发单元,139-接口单元。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
实施例
参阅图1所示,本实施例提供一种光电检测器,包括:光扫描机构10、信息处理电路13、过零检测单元11以及量程定位单元12,其中,
所述过零检测单元11和量程定位单元12均设于显示屏的同一侧,且为了方便计算触摸件的坐标位置,所述过零检测单元11设于所述光学元件103上光束入射点的同一水平线上;需要说明的是,在本实施例中的过零检测单元11、量程定位单元12以及触摸件均携带有一光敏二极管。
所述光扫描机构10用以发射一条光束扫描显示屏的触摸区域图像像素区域;具体的,所述光扫描机构10包括:用以产生入射光束的发光源101;用以反射所述入射光束的光学元件103;和用以驱动所述光学元件103旋转的马达102。
在一种优选的实施例中,所述马达102具有空心主轴1021,所述光学元件103固定在空心主轴1021的一端,所述发光源101设置于空心主轴1021的另一端,所述入射光束穿过所述空心主轴1021并入射到光学元件103上,其中,所述光学元件103设置为在空心主轴1021带动旋转的情况下,其所反射的光束与显示屏的触摸区域保持平行。其中,光学元件103为直角棱镜。
进一步的,所述马达102还包括转子1022以及定子线圈1023,相较于背景技术中指出的结构,本实施例旋转部件采用外转子1022马达102,励磁线圈安装在定子上没有机械换向滑环,更符合电磁兼容标准的规范。
当然,除了上述最优选的方式以外,还有其他的实施方式,如将发光源101设置在马达102转动轴上,同时将直角棱镜设置在发光源101上,当然这种结构由于发光源101在工作也会转动,并且发光源101是一个需要大电流驱动电路来驱动的功率器件,因此其需要采用如电刷滑环机械接触的方式才能获取供电。可以理解的是,该结构至少具有以下几个缺点:(1)机械触点相对于大电流来说阻抗大,长久运行机械触点氧化造成接触不良;(2)滑环在高速机械旋转下,接触点摩擦温度很快升高加速触电老化;(3)滑环在高速机械旋转下,触点高速磨损也会造成接触不良;(4)机械机构在电气运行过程还会产生电磁噪声干扰。因此背景技术中激光扫描结构容易出现电路故障和机械故障,缩短产品使用寿命。
因此采用本方案的最有实施例是可以解决上述技术问题,激光扫描充分利用光学原理,将激光发射头固定安装,光束直射到马达102空心主轴1021上的直角棱镜反射实现扫描,与旋转结构没有电气连接。因此更符合电磁兼容标准的规范。
所述信息处理电路13,其电性连接所述光扫描机构10,用以驱动所述光扫描机构10运行;具体的,信息处理电路13包括计时单元132、第一前置放大单元131、第二前置放大单元134、时钟单元135、逻辑控制/计算单元136、RAM单元137、射频信号收发单元138、接口单元139以及驱动单元133,其中,所述第一前置放大单元131、第二前置放大单元134、时钟单元135、逻辑控制/计算单元136均与所述计时单元132连接。
具体的,在本实施例中通过两个光电检测器来进行显示屏的触摸定位,因此所述计时单元132包括第一计时器1321、第二计时器1322、第三计时器1323以及第四计时器1324;其中,所述第一计时器1321与所述第一前置放大单元131连接,用以获取光束旋转一周的时间当量;所述第二计时器1322与所述第二前置放大单元134连接,用以获取光束从所述过零检测单元11到达所述量程定位单元12的所述第一时间当量;所述第三计时器1323与所述逻辑控制/计算单元136连接,用以获取光束从所述过零检测单元11到达另一光电检测器对应的第二前置放大单元134的第二时间当量;所述第四计时器1324与所述逻辑控制/计算单元136连接,用以获取光束从所述过零检测单元11到达所述触摸件的第三时间当量。
所述第一前置放大单元131输入端与过零检测单元11连接,输出端与计时单元132连接,用以接收过零检测单元11检测到光束轨迹上光点时发送的光电脉冲,进而对光电脉冲进行放大处理,并传输至所述计时单元132启动/结束所述第一计时器1321,进而通过第一计时器1321累计的时间获取到光束旋转一周的时间当量。
所述第二前置放大单元134输入端与所述量程定位单元12连接,输出端与所述第二计时器1322连接,用以接收量程定位单元12检测到光束轨迹上光点时发送的光电脉冲,进而对光电脉冲进行放大处理,并控制第二计时器1322停止计时,第二计时器1322累计的时间即为光扫描的第一时间当量,通过将第一时间当量代入公式,即可算得过零检测单元11、光学元件103上的光束反射点与量程定位单元12三者之间对应的角弧度,角弧度的计算公式如下:
式(1)中,t为时间当量,t
所述时钟单元135第一输出端连接所述计时单元132,用以提供计时脉冲;第二输出端连接所述逻辑控制/计算单元136,用以提供时序时钟。
进一步的,所述驱动单元133一端连接所述马达102和发光源101,另一端连接所述逻辑控制/计算单元136,辑控制/计算单元通过所述驱动单元133驱动所述马达102和发光源101运转。
所述RAM单元137、射频信号收发单元138以及接口单元139均与所述逻辑控制/计算单元136连接,其中,所述RAM单元137用以缓存所述逻辑控制/计算单元136控制过程数据,所述射频信号收发单元138与所述触摸件射频通信,所述接口单元139连接至显示屏的主计算机,用以将获取到触摸件坐标位置发送至主计算机。
所述射频信号收发单元138用以接收触摸件检测到光束轨迹上光点时发送的光电脉冲,并经逻辑控制/计算单元136控制第四计时器1324停止计时,第三计时器1323累计的时间即为光扫描的第三时间当量,通过将第三时间当量代入式(1),即可算得过零检测单元11、光学元件103上的光束反射点与触摸件三者之间对应的角弧度。
逻辑控制/计算单元136还用以接收另一光电检测器的量程定位单元12检测到光束轨迹上光点时发送的光电脉冲,并控制第三计时器1323停止计时,第三计时器1323累计的时间即为光扫描的第二时间当量,通过将第二时间当量代入式(1),即可算得过零检测单元11、光学元件103上的光束反射点与另一光电检测器的量程定位单元12三者之间对应的角弧度。
参阅图2所示,本实施例还提供一种使用上述光电检测器实现显示屏触摸定位的方法,具体包括如下步骤:
对于显示器的图像像素区域,交替使用第一光电检测器和第二光电检测器进行两个坐标系的光束扫描,在计算触摸件在显示屏上对应光点的坐标值之前还包括:获取图像像素区域的像素分辨率值,基于所述像素分辨率值确定两个所述量程定位单元12之间连线的长度当量,同时获取两个所述量程定位单元12之间连线与触摸区域一边框的角度;可以理解的是,作为优选的实施例为了方便对触摸件的坐标进行计算,将两个量程定位单元12分别设置在所述图像像素区域第一行的首像素点和末像素点处,例如,若获取到的像素分辨率值为长1920像素,宽1080像素,那么两个所述量程定位单元12之间连线的长度当量为1920像素;同时所述第一光电检测器和第二光电检测器的光学元件103上光束入射点之间的连线与两个所述量程定位单元12之间的连线平行。
可以理解的是,根据三角函数定理即需要获取至少两个角的角度和三角形的任一边,才能计算出三角形的各条边长和高,进而计算出各个角(点)的坐标。因此,在本实施例中交替使用第一光电检测器和第二光电检测器进行光束扫描,第一光电检测器检测完,获取到第一个角相关参数;启动第二光电检测器检测完,获取到第二个角相关参数;可以理解的是,本实施例的两个光电检测器发射光束的波长相同,因此为了避免光电检测器无法分辨光电脉冲是从何处发出,进而控制两个光电检测器交替进行检测。
具体的,所述两个坐标系包括经第一光电检测器的光扫描机构10发射的光束轨迹经过零检测单元11、量程定位单元12、触摸件以及第二光电检测器的量程定位单元12各光点而生成的第一坐标系,以及经第二光电检测器的光扫描机构10发射的光束轨迹经过零检测单元11、量程定位单元12、触摸件以及第一光电检测器的量程定位单元12各光点而生成的第二坐标系;
参阅图3所示,通过计时单元132分别对光束轨迹经过零检测单元11到上述各光点的时间进行累计,获取各光点对应的时间当量,进而确定光束恒速旋转的角弧度;具体包括:
当第一光电检测器发出的光束到达过零检测单元11时,所述过零检测单元11产生光电脉冲发送至所述计时单元132,启动各计时器开始计时;
当光束到达量程定位单元12时,所述量程定位单元12产生光电脉冲发送至所述计时单元132,控制第二计时器1322停止计时,获得过零检测单元11与所述量程定位单元12之间角弧度的第一时间当量t
当光束到达触摸件时,触摸件产生光电脉冲发送至所述计时单元132,控制第四计时器1324停止计时,获得过零检测单元11与所述触摸件之间角弧度的第三时间当量t
当光束到达第二光电检测器的量程定位单元12时,该量程定位单元12产生光电脉冲至所述第一光电检测器的计时单元132,控制第三计时器1323停止计时,获得过零检测单元11与该量程定位单元12之间角弧度的第二时间当量t
当光束旋转一周到达所述第一光电检测器的过零检测单元11时,所述过零检测单元11产生光电脉冲发送至所述计时单元132,控制第一计时器1321停止计时,获得光扫描一周的时间当量t
进一步的,获取到时间当量t
读取并缓存所述第一计时器1321、第二计时器1322、第三计时器1323和第四计时器1324的数据,同时复位所述第一计时器1321、第二计时器1322、第三计时器1323和第四计时器1324;控制进行中的光电检测器中止光束发射,启动另一光电检测器。
具体的,计算角弧度的公式如下:
式(1)中,t为时间当量,t
进一步的,将第一坐标和第二坐标进行整合,整合结果参阅图4所示;根据三角函数计算出显示屏上触摸件对应光点的坐标值。
下面对采用最优实施例的光电触摸定位的方法进行说明,需要说明的是,在最优实施例中,两个所述量程定位单元12之间的连线与所述第一光电检测器和第二光电检测器的光学元件103上光束入射点之间的连线平行,且两个所述量程定位单元12之间连线的长度当量为分辨率值的长;该方法具体如下:
参阅图4所示,示出了两个坐标的整合结果,从该几何图中获取如下参数:第一光电检测器的光束发射点O以及第一过零检测单元P
将时间当量t
获取到所需参数后,根据三角函数计算触摸件的坐标值,具体计算如下:
①根据三角函数定理,P
∵P
∴∠P
∴OO′=P
②根据三角函数定理,O′P
∵
∴
将(*-1)式代入,则:
③计算P
∵P
将(*-2)式代入,即:
∴
④计算O
∵O
其中,O
将(*-1)代入,则:
O
∴
⑤计算O′P
将(*-1)式代入,则:
⑥计算P
⑦计算X
Y=X
∠X
∠X
∴
⑧计算X
X
⑨计算X
X
⑩计算P
X=P
Y=X
从而获得触摸件P
综上所述,本发明的光电检测器通过发光源101、马达102以及固定在马达102一端的光学元件103来发射光束,能够避免显示屏触摸区域出现扫描盲区,且在使用过程中电磁噪声小,电磁干扰现象弱;光电检测器发射光束扫描显示屏触摸区域,两个光电检测器的光束轨迹经过过零检测单元11、量程定位单元12以及触摸件经逻辑控制/计算单元136获取两个坐标系;基于光电检测器的计时单元132,获取各光点的时间当量,进而确定光束恒速旋转的角弧度;将第一坐标和第二坐标进行整合,根据三角函数计算出显示屏上触摸件对应光点的坐标值,即能够高精度的实现触摸定位。以及,本发明提供的光电检测器具有通用性,能够适用于不同尺寸的平面显示器(类似计算机、电子白板的显示画面等)。
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种光电检测器及其光电触摸定位的方法
- 定位光电检测器、检测系统及其触摸屏