一种格斗陪练机器人
文献发布时间:2023-06-19 11:06:50
技术领域
本发明涉及一种拳击陪练装置,尤其是涉及一种抗击打陪练器。
背景技术
目前在搏击、格斗、武术等运动中,常用木人桩、砂包等进行打击力量训练,木人桩、沙包等只能作为简单的训练靶子。木人桩、沙包等通过需要通过教练的教学才能掌握一些拳法套路,若个人进行训练的话往往效果不大,但是聘请教练的话往往花费较大,而且还要去特定的场所进行训练,十分的不方便。
发明内容
本发明主要解决现有技术所存在的现有的陪练器不能自主教学拳法套路,只能进行个人训练效果不大等的技术问题,提供一种不用教练配合也可以进行拳法练习的抗击打陪练器。
为了解决上述技术问题实现上述发明目的,本发明提供一种格斗陪练机器人,包括击打桩,其特征在于,所述的击打桩周向设置有若干个出拳孔,所述的出拳孔内均设置有出拳装置,所述的出拳装置与设置有多种出拳模式的控制装置相连,所述的击打桩包括纵向排列设置的头部机体、上身机体与下身机体,所述的下身机体通过升降旋转装置与底座相连,所述的上身机体通过所述的升降旋转装置与所述的下身机体相连,所述的升降旋转装置与所述的控制装置相连。
作为本发明格斗陪练机器人的优化,所述的出拳模式包括随机出拳模式及套路出拳模式,所述的出拳装置包括横移弹簧及转动套,所述的横移弹簧与所述的转动套旋合设置,所述的横移弹簧一端固定设有拳套,所述的转动套与驱动装置传动连接,所述的驱动装置与所述的控制装置相连,所述的转动套外套设有轴承,所述的轴承的外圈通过连接柱与所述的出拳孔的顶壁固定连接,所述的横移弹簧内同轴设置有导向柱,所述的导向柱设置在所述的出拳孔内,所述的导向柱与所述的横移弹簧间隙配合,所述的导向柱的一端与所述的出拳孔的底壁固定连接,另一端向所述的转动套延伸并延伸出所述的转动套。
作为本发明格斗陪练机器人的优化,所述的出拳孔的轴线与所述的击打桩垂直设置。
作为本发明格斗陪练机器人的优化,,所述的驱动装置包括转动电机与三角带,所述的转动电机与所述的控制装置相连,所述的转动电机通过所述的三角带与所述的转动套传动连接,所述的转动套的表面周向设置有与所述的三角带适配的环形槽,所述的三角带设于所述的环形槽内。
作为本发明格斗陪练机器人的优化,所述的下身机体通过升降旋转装置与所述的底座固定连接。
作为本发明格斗陪练机器人的优化,所述的底座为圆形轨道式结构,所述的升降旋转装置通过转动装置与所述的底座转动连接,所述的转动装置包括与所述的升降旋转装置的底部固定连接的转动块,所述的转动块与所述的升降旋转装置相连另一端设有若干组与所述的底座滚动连接的滚轮组,所述的滚轮组与电机转动连接,所述的电机与所述的控制装置相连,所述的底座的内径为2m-3.5m。
作为本发明格斗陪练机器人的优化,所述的击打桩上设置有热敏距离传感器,所述的热敏距离传感器与设有距离极限值的控制装置相连。
作为本发明格斗陪练机器人的优化,所述的升降旋转装置包括第一立柱、第二立柱及用于控制所述的第二立柱转动升降的伺服电机,所述的第一立柱通过所述的伺服电机与所述的第二立柱升降旋转连接。
作为本发明格斗陪练机器人的优化,所述的上身机体与所述的下身机体均为长方体结构,所述的出拳孔包括设于所述的上身机体上的仿拳出击孔及设于所述的下身机体上的仿腿出击孔。
作为本发明格斗陪练机器人的优化,所述的拳套内设置于用于检测击打力的压力感应器,所述的压力感应器与所述的控制装置相连,所述的控制装置与用于显示击打准确率及击打力数值的显示装置相连,所述的出拳孔朝外一端设有用于检测所述的拳套是否出击的红外线检测装置,所述的红外线检测装置与所述的控制装置相连,所述的控制装置与用于将训练数据输出的通讯装置相连,所述的控制装置与扬声器组件相连。
相对于现有技术,本发明格斗陪练机器人具有以下有益效果:
1.控制装置内设置随机出拳模式及套路出拳模式,练习者可以根据使用环境不同调整对应模式进行练习,当练习者需要进行基础性练习时,控制装置控制调整成为套路出拳模式,控制装置根据不同拳法套路控制出拳孔内的的出拳装置按序出拳供练习者击打,从而学习不同拳法套路,当练习者需要进行实战练习时,控制装置调整成为随机出拳模式,控制装置控制出拳装置随机出拳供练习者击打,由于下身机体通过升降旋转装置与底座相连,上身机体通过升降旋转装置与下身机体相连,因此上身机体、下身机体与底座三者间的相对位置可以通过升降与旋转发生变化,以此达到拳法的变幻莫测,使得格斗陪练机器人的拳法套路更具实战价值,这样在没有教练教学的前提下就可以实现拳法套路的练习,而且可以达到良好的训练效果;
2.出拳装置的具体出拳方法为:控制装置控制转动电机转动,转动电机通过三角带带动转动套转动,因为转动套外套设有轴承,因此转动套在轴承内周向转动,在该装置下转动套为转动件,横移弹簧为从动件,从而转动套周向转动,横移弹簧发生横向位移,并带动拳套出击或回收,从而形成出拳装置的出拳;
3.横移弹簧内设置有导向柱,导向柱设置在出拳孔内,导向柱与横移弹簧间隙配合,导向柱的一端与出拳孔的底壁固定连接,另一端向转动套延伸并延伸出转动套的作用是因为横移弹簧是柔性的为了保证横移弹簧与转动套间的位置相对固定,因此在横移弹簧内设置导向柱避免弹簧在传动的过程中发生扭动;
4.拳套在出拳以后,伸出出拳孔的部分横移弹簧由于失去了导向柱的限制,因此会产生摆动,从而产生弯折,并以此可以练习拳法中的挡隔等动作;
5.当底座为圆形轨道式结构时,练习者站在底座形成的圆形圈内,转动装置带动整个击打桩沿底座的圆形路线做周向转动,控制装置控制出拳装置按序出拳,从而出拳装置形成走位式出拳,使得格斗陪练机器人的拳法套路更具实战价值;
6.击打桩分体设置成头部机体、上身机体及下身机体,并在上身机体上设置仿拳出击孔来模拟双手出拳,在下身机体上设置仿腿出击孔来模拟扫腿的动作,使得整个格斗陪练机器人的拳法更加逼真,使得格斗陪练机器人的拳法套路更具实战价值;
7.拳套内设置用于检测击打力的压力感应器,在拳套出拳后,压力感应器检测到压力信息则说明练习者击打成功,如若压力感应器没有及测到压力信息则说明练习者击打失败,拳套在出拳后压力感应器将是否检测到压力的信息发送至控制装置,控制装置在对击打成功率进行统计后在显示装置上显示以表明练习者对该拳法的熟悉程度;
8.当红外线检测装置检测到拳套伸出出拳孔时则表明出拳完成,出拳完成后红外线检测装置将检测到拳套的信息发送至控制装置,控制装置在接收到信息以后控制转动电机反转,从而实现拳套的回收;
9.击打桩上设置有热敏距离传感器,该热敏距离传感器是由热敏传感器和距离传感器组成设置而成,其中距离传感器是用来检测障碍物的距离,若距离传感器检测到障碍物以后,再由热敏传感器判断障碍物是否散发热量,若该障碍物散发热量时热敏距离传感器则判断该障碍物为人体,并将该障碍物距离击打桩的距离传输至控制装置,并与控制装置中的距离极限值比较,当检测到障碍物的距离小于距离极限值时控制装置控制出拳装置出拳;
10.同时压力感应器还可以调整成为测力模式,在测力模式下压力感应器对练习者出拳的力量进行检测,并在显示装置上进行显示;
11.通过通讯装置可以将练习者的练习数据传输至终端,终端也可以根据练习数据对练习者的段位进行评价及排行。
12.通过设置扬声器组件的作用是可以播放音乐,也可以在击打到压力感应器时发出声音从而提示练习者击打成功,而且可以在测定模式的时播报练习者出拳的力量。
因此,本发明具有结构合理、使用方便等特点。
附图说明
附图1是本发明底座固定式格斗陪练机器人的一种主视图;
附图2是本发明底座固定式格斗陪练机器人的一种俯视图;
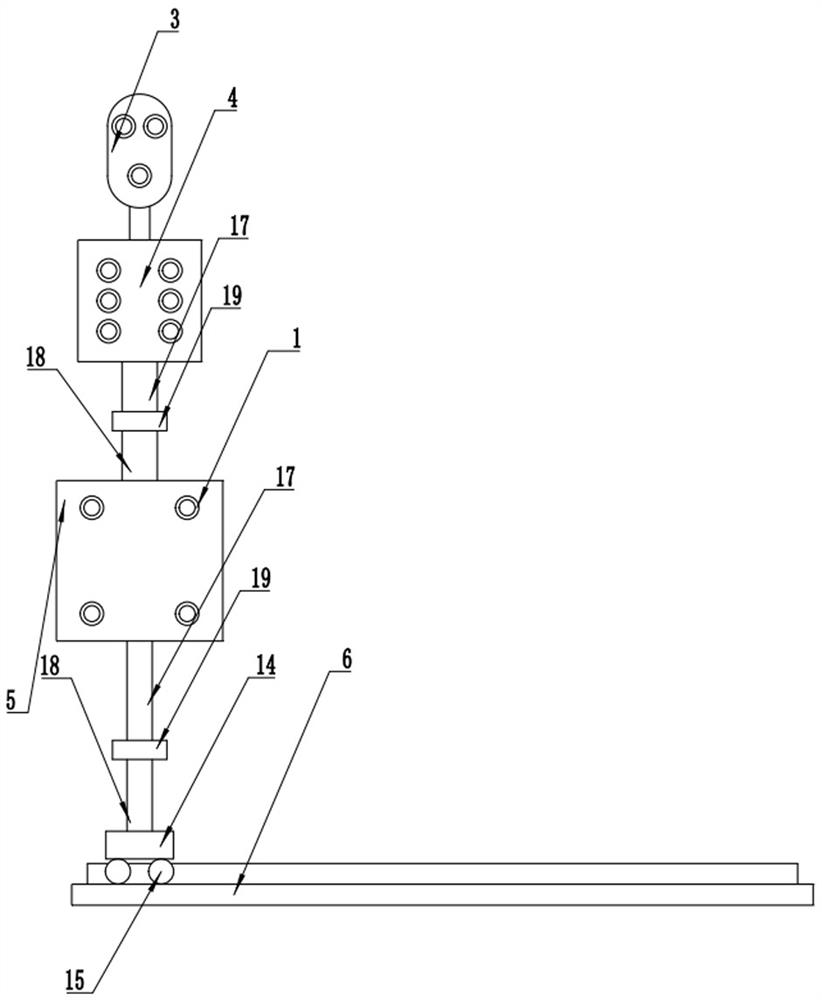
附图3是本发明底座圆形轨道式格斗陪练机器人的一种主视图;
附图4是本发明圆形轨道式底座的一种结构示意图;
附图5是本发明出拳装置的一种结构示意图;
附图6是本发明的一种线路示意图。
图中件号说明:1.出拳孔、2.控制装置、3.头部机体、4.上身机体、5.下身机体、6.底座、7.横移弹簧、8.转动套、9.拳套、10.轴承、11.导向柱、12.转动电机、13.三角带、14.转动块、15.滚轮组、16.电机、17.第一立柱、18.第二立柱、19.伺服电机、20.压力感应器、21.显示装置、22.红外线检测装置23.热敏距离传感器、24.通讯装置、25.扬声器组件。
具体实施方式
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
实施例1:
图1、图2、图5、及图6出示了本发明抗击打陪练器的一种实施例。一种格斗陪练机器人,包括击打桩,击打桩周向设置有若干个出拳孔1,出拳孔1为圆柱孔,出拳孔1内均设置有出拳装置,出拳装置与设置有多套拳法套路的控制装置2相连,击打桩包括纵向排列设置的头部机体3、上身机体4与下身机体5,下身机体5通过升降旋转装置与底座6相连,上身机体4通过升降旋转装置与下身机体5相连,升降旋转装置与控制装置2相连,出拳装置包括横移弹簧7及转动套8,横移弹簧7与转动套8旋合设置,转动套8的具体旋合方式为设置与横移弹簧7配合设置的内齿,横移弹簧7与转动套8的旋合就相当于螺杆与螺母的旋合,横移弹簧7一端固定设有拳套9,该拳套9由若干层橡胶包裹而成,转动套8与驱动装置传动连接,驱动装置与控制装置2相连,转动套8外套设有轴承10,轴承10的外圈通过连接柱与出拳孔1的顶壁固定连接,横移弹簧7内同轴设置有导向柱11,导向柱11设置在出拳孔1内,导向柱11与横移弹簧7间隙配合,导向柱11的一端与出拳孔1的底壁固定连接,另一端向转动套8延伸并延伸出转动套8,因为横移弹簧7是柔性的,所以为了保证横移弹簧7与转动套8间的位置相对固定,从而在横移弹簧7内设置导向柱11避免弹簧在传动的过程中发生扭动,出拳孔1的轴线与击打桩垂直设置,驱动装置包括转动电机12与三角带13,转动电机12与控制装置2相连,转动电机12通过三角带13与转动套8传动连接,转动套8的表面周向设置有与三角带13适配的环形槽,三角带13设于环形槽内,驱动装置传动方式还可以是齿轮转动,即在转动套8外设有齿轮,并配置有与该齿轮啮合设置的主动轮,主动轮与转动电机12相连,下身机体5通过升降旋转装置与底座6固定连接。升降旋转装置包括第一立柱17、第二立柱18及用于控制第二立柱18转动升降的伺服电机19,第一立柱17通过伺服电机19与第二立柱18升降旋转连接。上身机体4与下身机体5均为长方体结构,出拳孔1包括设于上身机体4上的仿拳出击孔及设于下身机体5上的仿腿出击孔,击打桩分体设置成头部机体3、上身机体4及下身机体5,并在上身机体4上设置仿拳出击孔来模拟双手出拳,在下身机体5上设置仿腿出击孔来模拟扫腿的动作,使得整个格斗陪练机器人的拳法更加逼真,使得格斗陪练机器人的拳法套路更具实战价值。拳套9内设置于用于检测击打力的压力感应器20,压力感应器20与控制装置2相连,控制装置2与用于显示击打准确率及击打力数值的显示装置21相连,拳套9内设置用于检测击打力的压力感应器20,在拳套9出拳后,压力感应器20检测到压力信息则说明练习者击打成功,如若压力感应器20没有及测到压力信息则说明练习者击打失败,拳套9在出拳后压力感应器20将是否检测到压力的信息发送至控制装置2,控制装置2在对击打成功率进行统计后在显示装置21上显示以表明练习者对该拳法的熟悉程度,同时压力感应器还可以调整成为测力模式,在测力模式下压力感应器对练习者出拳的力量进行检测,并在显示装置上进行显示,出拳孔1朝外一端设有用于检测拳套9是否出击的红外线检测装置,红外线检测装置22与控制装置2相连,当红外线检测装置22检测到拳套9伸出出拳孔1时则表明出拳完成,出拳完成后红外线检测装置22将检测到拳套9的信息发送至控制装置2,控制装置2在接收到信息以后控制转动电机12反转,从而实现拳套9的回收。击打桩上设置有热敏距离传感器23,热敏距离传感器23与设有距离极限值的控制装置2相连,该热敏距离传感器23是由热敏传感器和距离传感器组成设置而成,其中距离传感器是用来检测障碍物的距离,若距离传感器检测到障碍物以后,再由热敏传感器判断障碍物是否散发热量,若该障碍物散发热量时热敏距离传感器则判断该障碍物为人体,并将该障碍物距离击打桩的距离传输至控制装置2,并与控制装置2中的距离极限值比较,当检测到障碍物的距离小于距离极限值时控制装置控制出拳装置出拳,这样可以节省能耗,也可以更加贴合实际战斗,当热敏距离传感器23未检测到人体时出拳装置则为待战状态,而控制装置2中的距离极限值一般为1m-1.5m。控制装置2与用于将训练数据输出的通讯装置24相连的作用是通过通讯装置24可以将练习者的练习数据传输至终端,终端也可以根据练习数据对练习者的段位进行评价及排行。通过设置扬声器组件25的作用是可以播放音乐,也可以在击打到压力感应器20时发出声音从而提示练习者击打成功,而且可以在测定模式的时播报练习者出拳的力量。
控制装置2内设置随机出拳模式及套路出拳模式,练习者可以根据使用环境不同调整对应模式进行练习,当练习者需要进行基础性练习时,控制装置2控制调整成为套路出拳模式,控制装置2根据不同拳法套路控制出拳孔内的的出拳装置按序出拳供练习者击打,从而学习不同拳法套路,当练习者需要进行实战练习时,控制装置2调整成为随机出拳模式,控制装置2控制出拳装置随机出拳供练习者击打,所以控制装置2会根据不同出拳模式控制转动电机12转动,转动电机12通过三角带13带动转动套8转动,因为转动套8外套设有轴承10,因此转动套8在轴承10内周向转动,在该装置下转动套8为转动件,横移弹簧7为从动件,从而转动套8周向转动,横移弹簧7发生横向位移,并带动拳套9出击或回收,从而形成出拳装置的出拳供练习者击打,从而学习不同拳法套路,由于下身机体5通过升降旋转装置与底座6相连,上身机体4通过升降旋转装置与下身机体5相连,因此上身机体4、下身机体5与底座6三者间的相对位置可以通过升降与旋转发生变化,以此达到拳法的变幻莫测,使得格斗陪练机器人的拳法套路更具实战价值,这样在没有教练教学的前提下就可以实现拳法套路的练习,而且可以达到良好的训练效果,拳套9在出拳以后,伸出出拳孔1的部分横移弹簧7由于失去了导向柱11的限制,因此会产生摆动,从而产生弯折,并以此可以练习拳法中的挡隔等动作。
实施例2:
图3至图6出示了本发明抗击打陪练器的一种实施例。一种格斗陪练机器人,包括击打桩,击打桩周向设置有若干个出拳孔1,出拳孔1为圆柱孔,出拳孔1内均设置有出拳装置,出拳装置与设置有多套拳法套路的控制装置2相连,击打桩包括纵向排列设置的头部机体3、上身机体4与下身机体5,下身机体5通过升降旋转装置与底座6相连,上身机体4通过升降旋转装置与下身机体5相连,升降旋转装置与控制装置2相连,出拳装置包括横移弹簧7及转动套8,横移弹簧7与转动套8旋合设置,转动套8的具体旋合方式为设置与横移弹簧7配合设置的内齿,横移弹簧7与转动套8的旋合就相当于螺杆与螺母的旋合,横移弹簧7一端固定设有拳套9,该拳套9由若干层橡胶包裹而成,转动套8与驱动装置传动连接,驱动装置与控制装置2相连,转动套8外套设有轴承10,轴承10的外圈通过连接柱与出拳孔1的顶壁固定连接,横移弹簧7内同轴设置有导向柱11,导向柱11设置在出拳孔1内,导向柱11与横移弹簧7间隙配合,导向柱11的一端与出拳孔1的底壁固定连接,另一端向转动套8延伸并延伸出转动套8,因为横移弹簧7是柔性的,所以为了保证横移弹簧7与转动套8间的位置相对固定,从而在横移弹簧7内设置导向柱11避免弹簧在传动的过程中发生扭动,出拳孔1的轴线与击打桩垂直设置,驱动装置包括转动电机12与三角带13,转动电机与控制装置相连,转动电机12通过三角带13与转动套8传动连接,转动套8的表面周向设置有与三角带13适配的环形槽,三角带13设于环形槽内,驱动装置传动方式还可以是齿轮转动,即在转动套8外设有齿轮,并配置有与该齿轮啮合设置的主动轮,主动轮与转动电机12相连,底座6为圆形轨道式结构,升降旋转装置通过转动装置与底座6转动连接,转动装置包括与升降旋转装置的底部固定连接的转动块14,转动块14与升降旋转装置相连另一端设有若干组与底座6滚动连接的滚轮组15,滚轮组15与电机16转动连接,电机16与控制装置2相连,当底座6为圆形轨道式结构时,练习者站在底座6形成的圆形圈内,转动装置带动整个击打桩沿底座6的圆形路线做周向转动,控制装置2控制出拳装置按序出拳,从而出拳装置形成走位式出拳,使得格斗陪练机器人的拳法套路更具实战价值,底座6的内径为2m或2.5m或3m或3.5m。升降旋转装置包括第一立柱17、第二立柱18及用于控制第二立柱18转动升降的伺服电机19,第一立柱17通过伺服电机19与第二立柱18升降旋转连接。上身机体4与下身机体5均为长方体结构,出拳孔1包括设于上身机体4上的仿拳出击孔及设于下身机体5上的仿腿出击孔,击打桩分体设置成头部机体3、上身机体4及下身机体5,并在上身机体4上设置仿拳出击孔来模拟双手出拳,在下身机体5上设置仿腿出击孔来模拟扫腿的动作,使得整个格斗陪练机器人的拳法更加逼真,使得格斗陪练机器人的拳法套路更具实战价值。拳套9内设置于用于检测击打力的压力感应器20,压力感应器20与控制装置2相连,控制装置2与用于显示击打准确率及击打力数值的显示装置21相连,拳套9内设置用于检测击打力的压力感应器20,在拳套9出拳后,压力感应器20检测到压力信息则说明练习者击打成功,如若压力感应器20没有及测到压力信息则说明练习者击打失败,拳套9在出拳后压力感应器20将是否检测到压力的信息发送至控制装置2,控制装置2在对击打成功率进行统计后在显示装置21上显示以表明练习者对该拳法的熟悉程度,同时压力感应器还可以调整成为测力模式,在测力模式下压力感应器对练习者出拳的力量进行检测,并在显示装置上进行显示,出拳孔1朝外一端设有用于检测拳套9是否出击的红外线检测装置,红外线检测装置22与控制装置2相连,当红外线检测装置22检测到拳套9伸出出拳孔1时则表明出拳完成,出拳完成后红外线检测装置22将检测到拳套9的信息发送至控制装置2,控制装置2在接收到信息以后控制转动电机12反转,从而实现拳套9的回收。击打桩上设置有热敏距离传感器23,热敏距离传感器23与设有距离极限值的控制装置2相连,该热敏距离传感器23是由热敏传感器和距离传感器组成设置而成,其中距离传感器是用来检测障碍物的距离,若距离传感器检测到障碍物以后,再由热敏传感器判断障碍物是否散发热量,若该障碍物散发热量时热敏距离传感器则判断该障碍物为人体,并将该障碍物距离击打桩的距离传输至控制装置2,并与控制装置2中的距离极限值比较,当检测到障碍物的距离小于距离极限值时控制装置控制出拳装置出拳,这样可以节省能耗,也可以更加贴合实际战斗,当热敏距离传感器23未检测到人体时出拳装置则为待战状态,而控制装置2中的距离极限值一般为1m-1.5m。控制装置2与用于将训练数据输出的通讯装置24相连的作用是通过通讯装置24可以将练习者的练习数据传输至终端,终端也可以根据练习数据对练习者的段位进行评价及排行。通过设置扬声器组件25的作用是可以播放音乐,也可以在击打到压力感应器20时发出声音从而提示练习者击打成功,而且可以在测定模式的时播报练习者出拳的力量。
控制装置2内设置随机出拳模式及套路出拳模式,练习者可以根据使用环境不同调整对应模式进行练习,当练习者需要进行基础性练习时,控制装置2控制调整成为套路出拳模式,控制装置2根据不同拳法套路控制出拳孔内的的出拳装置按序出拳供练习者击打,从而学习不同拳法套路,当练习者需要进行实战练习时,控制装置2调整成为随机出拳模式,控制装置2控制出拳装置随机出拳供练习者击打,所以控制装置2会根据不同出拳模式控制转动电机12转动,转动电机12通过三角带13带动转动套8转动,因为转动套8外套设有轴承10,因此转动套8在轴承10内周向转动,在该装置下转动套8为转动件,横移弹簧7为从动件,从而转动套8周向转动,横移弹簧7发生横向位移,并带动拳套9出击或回收,从而形成出拳装置的出拳供练习者击打,从而学习不同拳法套路,由于下身机体5通过升降旋转装置与底座6相连,上身机体4通过升降旋转装置与下身机体5相连,因此上身机体4、下身机体5与底座6三者间的相对位置可以通过升降与旋转发生变化,以此达到拳法的变幻莫测,使得格斗陪练机器人的拳法套路更具实战价值,这样在没有教练教学的前提下就可以实现拳法套路的练习,而且可以达到良好的训练效果,拳套9在出拳以后,伸出出拳孔1的部分横移弹簧7由于失去了导向柱11的限制,因此会产生摆动,从而产生弯折,并以此可以练习拳法中的挡隔等动作。
可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本发明的教导下,可以对这些特征和实施例进行修改以实用具体的情况及材料而不脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本申请的权利要求范围内的实施例都属于本发明所保护的范围内。
- 一种格斗陪练机器人
- 一种格斗陪练机器人