一种便于多角度调节固定机构
文献发布时间:2023-06-19 11:09:54
技术领域
本发明属于加工固定辅助设备技术领域,尤其涉及一种便于多角度调节固定机构。
背景技术
在机电工程中,有很多小件材料需要开孔或者打磨以及其他的加工,一般的操作是直接使用夹具进行固定或者由操作人员手持材料进行操作。但是,现有技术中的夹具较为固定,其通常只能够将材料进行单一固定方式进行固定,并且不同的的材料其所需要夹持固定的位置不同,方向不同,现有技术中的夹具很难满足要求,不够灵活;而通过操作人员手持进行加工的方式,难以固定,这种操作方式便捷性差,特别是小件材料结构设计种类多样,操作人员将其放置在地面或者一般的固定平台上,难以进行平稳的加工作业,容易出现材料放置不稳等问题,同时,若加工人员自己手持材料,稳定性差,容易产生材料滑脱或钻孔位置出现偏差,施工的精准度难以把握,并且可能对人身安全造成伤害,给加工带来不便,存在材料浪费情况,不利于项目成本控制。
可见,现有技术中,对于零件或者物品的夹持固定不够灵活,难以满足多角度调节的需求,急需设计一种灵活调节的固定机构进行进行加工固定。
发明内容
本发明实施例的目的在于提供一种便于多角度调节固定机构,旨在解决现有技术中,对于零件或者物品的夹持固定不够灵活,难以满足多角度调节的需求。
本发明实施例是这样实现的,一种便于多角度调节固定机构,其包括:
机构本体,所述机构本体可用于将机构整体安装设置在固定面上;
移动调节机构,所述移动调节机构设置在所述机构本体上,所述移动调节机构包括导向座、弧形移动导轨和安装座,所述导向座可移动设置在所述安装座上,所述弧形移动导轨设置在所述导向座上,所述安装座可移动设置在所述弧形移动导轨上;以及
夹紧固定机构,所述夹紧固定机构设置在所述安装座上,所述夹紧固定机构用于夹紧固定物体,所述夹紧固定机构可在所述安装座沿所述弧形移动导轨以及所述导向座在所述机构本体上移动朝向多个不同角度和方向进行夹紧固定。
在本发明实施例的方案中,所述导向座在所述机构本体上沿弧形轨迹移动;所述导向座上设有弧形滑轨,所述机构本体上设有滑块,或所述机构本体上设有弧形滑轨,所述导向座滑动设置在所述弧形滑轨上。
在本发明实施例的方案中,所述弧形移动导轨和所述弧形滑轨均为圆弧形,且所述弧形移动导轨在所述导向座沿所述弧形滑轨移动时转动的轨迹形成球面。
在本发明实施例的方案中,所述安装座与所述机构本体之间设有辅助固定机构,所述辅助固定机构包括:
支撑件,所述支撑件可转动设置在所述机构本体上;
旋转球体,所述旋转球体可转动设置在所述支撑件上;
连接杆,所述连接杆一端与所述安装座连接,另一端与所述旋转球体连接,所述安装座沿所述弧形移动导轨移动时,所述连接杆可随所述安装座移动并带动所述旋转球体转动,所述连接杆与所述支撑件共同形成对所述安装座的辅助支撑。
在本发明实施例的方案中,所述连接杆与所述旋转球体之间为固定连接或可滑动连接。
在本发明实施例的方案中,所述连接杆与所述旋转球体之间为固定连接,所述旋转球体的球心与所述弧形移动导轨的圆心重合。
在本发明实施例的方案中,所述连接杆与所述旋转球体之间为固定连接,所述旋转球体上设有穿孔,所述连接杆穿过所述穿孔与所述旋转球体连接,且所述连接杆上设有锁紧件,用于锁紧所述连接杆与所述旋转球体之间的位置关系。
在本发明实施例的方案中,所述夹紧固定机构可转动设置在所述安装座上;所述夹紧固定机构包括:
安装架,所述安装架可转动设置在所述安装座上;
夹持机构,所述夹持机构包括两个夹持爪、两个齿轮和一根驱动齿条,两个所述夹持爪可转动设置在所述安装架上,所述两个齿轮可转动设置在所述安装架上,分别用于驱动两个所述夹持爪转动,所述驱动齿条可移动设置在所述安装架上,所述驱动齿条用于沿所述安装架移动驱动两个所述齿轮转动带动夹持爪转动夹持物体。
在本发明实施例的方案中,所述驱动齿条设置有两面轮齿,所述驱动齿条设置在两个所述齿轮之间,分别同时驱动两个所述齿轮转动。
在本发明实施例的方案中,所述导向座和/或所述安装座上设有锁紧机构,所述锁紧机构用于锁定所述导向座在所述弧形移动导轨的位置或所述安装座在所述机构本体上的位置。
本发明实施例提供的一种便于多角度调节固定机构与现有技术相比,具有如下优点和有益效果:
1、本发明实施例中通过设置包括弧形移动导轨和可移动导向座,并且将夹紧固定机构设置在可以沿着弧形移动导轨移动的安装座上,从而结合弧形移动导轨和可移动导向座,可以进行多角度的调节安装座的朝向和角度,从而改变夹持固定机构的角度和方向,实现多角度调节固定,能够满足人们的需求;
2、本发明实施例中通过将导向座的移动轨迹设计成弧形,并且弧形移动导轨和弧形滑轨均为圆弧形,且弧形移动导轨在导向座沿弧形滑轨移动时转动的轨迹形成球面,球面的球半径与弧形移动导轨的圆弧半径相等,从而使得移动导轨能够将安装座朝向球心到球面的直线的各个方向,极大地增大了角度调节的灵活性和精度;
3、本发明实施例中通过设置辅助固定机构,能够进一步的保证多角度调节的时候整体固定机构的稳定性和牢固性,其中通过旋转球体的使用,能够极大地增强了辅助固定机构的灵活性,安装座进行移动以及导向座进行移动的结合情形之下,旋转球体能够保证与安装座之间的连接固定关系,并且不会形成干涉,安装座能够灵活的进行调整;
4、本发明实施例中提供的两种辅助固定机构的结构方式,其中连接杆与旋转球体之间固定连接的方式通过将旋转球体的球心与弧形移动导轨的圆心重合,能够满足安装座的移动调节需求,其整体结构比较简单,辅助固定机构的调节也相对简单;而连接杆与旋转球体之间为可滑动连接的方式,不需要对旋转球体的球心与弧形移动导轨的圆心之间的关系进行限制,能够极大地提高角度调节的灵活性;
5、本发明实施例中提供的夹紧固定机构通过可转动设置在安装座上,能够进一步的增多一个调节方向,进一步的提高多角度调节的可调节性;同时,通过双面轮齿的驱动齿条共同进行驱动,能够保证两个夹持爪同步运动,保证夹持作用;
6、通过锁紧机构能够锁紧固定导向座和/或安装座,调节完毕之后保证整体机构的稳定性和牢固性,进一步的保证固定效果。
附图说明
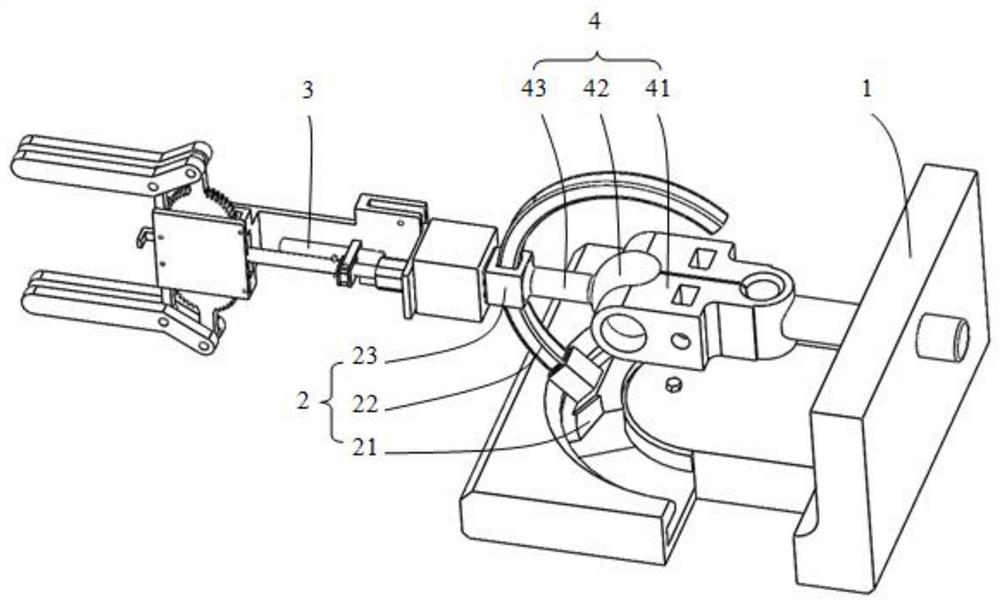
图1为本发明实施例提供的便于多角度调节固定机构的结构示意图;
图2为本发明实施例提供的机构本体的结构示意图;
图3为本发明实施例提供的一种连接杆与所述旋转球体连接关系的示意图;
图4为本发明实施例提供的夹紧固定机构的结构示意图。
附图中:1、机构本体;11、弧形滑轨;12、安装入口;2、移动调节机构;21、导向座;22、弧形移动导轨;23、安装座;3、夹紧固定机构;31、安装架;32、夹持机构;321、夹持爪;322、齿轮;323、驱动齿条;324、第一连杆;325、第二连杆;4、辅助固定机构;41、支撑件;42、旋转球体;43、连接杆;44、穿孔;45、锁紧件。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
以下结合具体实施例对本发明的具体实现进行详细描述。
如图1所示,为本发明实施例提供的一种便于多角度调节固定机构的结构示意图,本发明实施例是这样实现的,一种便于多角度调节固定机构,包括:
机构本体1,所述机构本体1可用于将机构整体安装设置在固定面上;
移动调节机构2,所述移动调节机构2设置在所述机构本体1上,所述移动调节机构2包括导向座21、弧形移动导轨22和安装座23,所述导向座21可移动设置在所述安装座23上,所述弧形移动导轨22设置在所述导向座21上,所述安装座23可移动设置在所述弧形移动导轨22上;以及
夹紧固定机构3,所述夹紧固定机构3设置在所述安装座23上,所述夹紧固定机构3用于夹紧固定物体,所述夹紧固定机构3可在所述安装座23沿所述弧形移动导轨22以及所述导向座21在所述机构本体1上移动朝向多个不同角度和方向进行夹紧固定。
其中,本发明实施例中的机构本体1仅作为示意解释说明,特别的,本发明实施例中如图1中所示,机构本体1主要为L型设计,但是在本发明的其他实施例中,本领域技术人员可以根据实际情况进行简单的变形设计,在此不进一步的展开说明。另外,对于如何将机构本体1设置在固定面上,本领域技术人员可以根据现有技术中的常用固定手段来进行实现,比如螺栓固定、卡紧固定等方式,在此不对其固定方式进行展开示意。
其中,弧形移动导轨22可以是规则弧形,也可以是不规则弧形,在本发明图1以及下面所描述中,主要以规则的弧形移动导轨22为例进行说明,但是并不是对弧形移动导轨22的唯一限制,本领域技术人员可以根据实际配合关系简单的调整弧形结构,在此不进一步的展开描述和示意。同时,需要说明的是,本发明实施例中的弧形移动导轨22的导向优选与导向座21的移动方向垂直,或者成一定的夹角,以便形成大角度调节的可能性。
其中,夹紧固定机构3可以根据实际所夹持的物体进行简单变形设计,本发明实施例中下面所描述到的设计仅作为其中一个优选实施例进行描述,本领域技术人员可以根据本发明下面描述的夹紧固定机构3进行简单变形,或者使用现有技术中的夹紧固定机构3来替换使用,在此不进一步的展开更多形式的描述。
在本发明实施例的方案中,所述导向座21在所述机构本体1上沿弧形轨迹移动;所述导向座21上设有弧形滑轨,所述机构本体1上设有滑块,或所述机构本体1上设有弧形滑轨,所述导向座21滑动设置在所述弧形滑轨上。
如图2中所示,为本发明实施例中提供的机构本体1的结构示意图,其中本发明实施例中以在机构本体1上设置有弧形滑轨11为例进行说明,相应的,导向座21滑动设置在弧形滑轨11上,实际上本发明实施例中将导向座21的下部做成了滑块与弧形滑轨11滑动配合;另外,对于机构本体1设置滑块的类型在此不进一步的展示。
另外,如图2中所示,可以在机构本体1的侧边开设安装入口12,可以通过安装入口12将导向座21安装插入到弧形滑轨中;进一步的,还可以在安装入口12处设置可拆卸的阻挡机构来保证导向座21安插进入弧形滑轨之后不会超限掉出,对于阻挡机构可以是简单的螺栓阻挡,或者挡块设置,在此不进一步的展开描述和示意。
在本发明实施例的方案中,所述弧形移动导轨22和所述弧形滑轨11均为圆弧形,且所述弧形移动导轨22在所述导向座21沿所述弧形滑轨移动时转动的轨迹形成球面。
其中,圆弧形是指规则的圆弧形,球面是指规则的球面,实际上,通过将二者均设计成圆弧形,安装座23在弧形移动导轨22自动和导向座21在弧形滑轨11上移动实际上均是相对于在同一球面上的路径移动,从而能够实现多角度的调节。
在本发明实施例的方案中,如图1中所示,所述安装座23与所述机构本体1之间设有辅助固定机构4,所述辅助固定机构4包括:
支撑件41,所述支撑件41可转动设置在所述机构本体1上;
旋转球体42,所述旋转球体42可转动设置在所述支撑件41上;
连接杆43,所述连接杆43一端与所述安装座23连接,另一端与所述旋转球体42连接,所述安装座23沿所述弧形移动导轨22移动时,所述连接杆43可随所述安装座23移动并带动所述旋转球体42转动,所述连接杆43与所述支撑件41共同形成对所述安装座23的辅助支撑。
其中,支撑件41的可转动设置可以是通过轴承等常用的转动连接件进行设置安装;对于旋转球体42,可以对应的在支撑件41上设置球形安装槽,然后通过热加工套入的方式将旋转球体42装入到球形安装槽内,该工艺方式在本领域中比较成熟,在此不对其进行展开描述,对于旋转球体42与支撑件41之间的安装连接关系在此不进一步的展开描述;另外,对于连接杆43的设置,其与安装座23的连接可以是可拆卸连接,比如螺杆螺孔配合,也可以是直接焊接或者一体化成型设计,在此不进一步的展开描述。
在本发明实施例的方案中,所述连接杆43与所述旋转球体42之间为固定连接或可滑动连接。
在本发明实施例的方案中,如图1中所示,所述连接杆43与所述旋转球体42之间为固定连接,所述旋转球体42的球心与所述弧形移动导轨22的圆心重合,从而使得如前面所述的可进行多角度的调节,且不会发生干涉或者变形移动阻碍,便于操作。
如图3所示,为本发明实施例中提供的另一种连接杆43与所述旋转球体42连接关系的示意图,在本发明实施例的方案中,所述连接杆43与所述旋转球体42之间为固定连接,所述旋转球体42上设有穿孔44,所述连接杆43穿过所述穿孔44与所述旋转球体42连接,且所述连接杆43上设有锁紧件45,用于锁紧所述连接杆43与所述旋转球体42之间的位置关系。其中,锁紧件45可以是螺母,连接杆43上可以设置螺纹,从而通过螺母来锁紧固定,在此不进一步的展开描述。
在本发明实施例的方案中,如图4所示,为本发明实施例中提供的夹紧固定机构3的结构示意图,所述夹紧固定机构3可转动设置在所述安装座23上;所述夹紧固定机构3包括:
安装架31,所述安装架31可转动设置在所述安装座23上;
夹持机构32,所述夹持机构32包括两个夹持爪321、两个齿轮322和一根驱动齿条323,两个所述夹持爪321可转动设置在所述安装架31上,所述两个齿轮322可转动设置在所述安装架31上,分别用于驱动两个所述夹持爪321转动,所述驱动齿条323可移动设置在所述安装架31上,所述驱动齿条323用于沿所述安装架31移动驱动两个所述齿轮322转动带动夹持爪321转动夹持物体。
其中,如前面所述,夹持爪321的具体形状,比如其朝向物体的一侧形状结构,可以根据实际夹持的物体进行设计,比如可以设计增强摩擦的结构,橡胶垫、摩擦纹路等,在此不进一步的展开描述。
进一步的,本发明实施例中,夹持爪321通过第一连杆324连接设置在安装架31上,第一连杆324与夹持爪321和安装架31均为可转动连接,夹持爪321的另一端还通过第二连杆325与齿轮322连接,从而第一连杆324、第二连杆-齿轮322、安装架31以及夹持爪321形成四边形机构,从而当齿轮322转动的时候带动第二连杆325转动则可以驱动四边形机构变动,从而驱动夹持爪321夹持物体,具体的运动本领域技术人员可以结合上述描述以及附图4中的示意进行理解,在此不进一步的展开描述。
在本发明实施例的方案中,所述驱动齿条323设置有两面轮齿,所述驱动齿条323设置在两个所述齿轮322之间,分别同时驱动两个所述齿轮322转动。
对于两面齿条的设计在此不进一步展开描述,如图4所示,本发明实施例中,驱动齿条323的一端通过伸缩驱动机构来驱动,伸缩机构可以使气缸或者电动伸缩杆,本领域技术人员可以进行选择使用。
在本发明实施例的方案中,所述导向座21和/或所述安装座23上设有锁紧机构,所述锁紧机构用于锁定所述导向座21在所述弧形移动导轨22的位置或所述安装座23在所述机构本体1上的位置。
其中,对于导向座21的锁紧机构,可以是通过在导向座21上设置螺纹孔,然后通过插入螺纹件使得螺纹件与弧形移动导轨22接触抵住形成摩擦从而固定导向座21的位置,同理的对于安装座23也是如此,在此不进一步的展开描述。
本发明实施例中提供的一种便于多角度调节固定机构在使用的时候,通过驱动齿条323带动夹持爪321夹持物体,然后通过转动导向座21,使得物体朝向目标方向;转动导向座21的时候,需要的时候可以转动支撑件41进行配合转动;然后移动安装座23,改变物体的角度,同样的,需要的时候可以转动支撑件41进行配合转动,从而多角度调节固定物体,还可以转动夹持固定机构再进一步的调节角度,调节完毕之后,通过锁紧机构的锁紧来保持整体固定机构的稳定和牢固,调节完毕便可以对物体进行对应的加工。
本发明实施例提供的一种便于多角度调节固定机构与现有技术相比,具有如下优点和有益效果:
1、本发明实施例中通过设置包括弧形移动导轨22和可移动导向座21,并且将夹紧固定机构3设置在可以沿着弧形移动导轨22移动的安装座23上,从而结合弧形移动导轨22和可移动导向座21,可以进行多角度的调节安装座23的朝向和角度,从而改变夹持固定机构的角度和方向,实现多角度调节固定,能够满足人们的需求
2、本发明实施例中通过将导向座21的移动轨迹设计成弧形,并且弧形移动导轨22和弧形滑轨均为圆弧形,且弧形移动导轨22在导向座21沿弧形滑轨移动时转动的轨迹形成球面,球面的球半径与弧形移动导轨22的圆弧半径相等,从而使得移动导轨能够将安装座23朝向球心到球面的直线的各个方向,极大地增大了角度调节的灵活性和精度;
3、本发明实施例中通过设置辅助固定机构4,能够进一步的保证多角度调节的时候整体固定机构的稳定性和牢固性,其中通过旋转球体42的使用,能够极大地增强了辅助固定机构4的灵活性,安装座23进行移动以及导向座21进行移动的结合情形之下,旋转球体42能够保证与安装座23之间的连接固定关系,并且不会形成干涉,安装座23能够灵活的进行调整;
4、本发明实施例中提供的两种辅助固定机构4的结构方式,其中连接杆与旋转球体42之间固定连接的方式通过将旋转球体42的球心与弧形移动导轨22的圆心重合,能够满足安装座23的移动调节需求,其整体结构比较简单,辅助固定机构4的调节也相对简单;而连接杆与旋转球体42之间为可滑动连接的方式,不需要对旋转球体42的球心与弧形移动导轨22的圆心之间的关系进行限制,能够极大地提高角度调节的灵活性;
5、本发明实施例中提供的夹紧固定机构3通过可转动设置在安装座23上,能够进一步的增多一个调节方向,进一步的提高多角度调节的可调节性;同时,通过双面轮齿的驱动齿条323共同进行驱动,能够保证两个夹持爪321同步运动,保证夹持作用;
6、通过锁紧机构能够锁紧固定导向座21和/或安装座23,调节完毕之后保证整体机构的稳定性和牢固性,进一步的保证固定效果。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 一种便于多角度调节固定机构
- 一种便于多角度调节的钢结构连接用焊接固定装置