晶圆调节装置及方法、晶圆传送系统
文献发布时间:2023-06-19 11:14:36
技术领域
本发明涉及晶圆制造领域,特别涉及一种晶圆调节装置及方法、晶圆传送系统。
背景技术
由于晶圆的制造包含多个具体制程,而不同制程的制造地点不同,因此通常需要通过传送台进行制程间的晶圆传送。由于晶圆制程的需求以及晶圆良率良率的需求,晶圆传送区域由氮气填充,从而避免氧气与晶圆的材料发生反应。
目前,当晶圆在传送过程中发生位置偏移时,需要人工进行调整。而人工调整需要打开晶圆传送区域的密闭门,密闭门一旦打开,晶圆便会暴露在空气中,如此,会导致晶圆良率下降问题。
发明内容
本发明实施例提供一种晶圆调节装置及方法、晶圆传送系统,该晶圆调节装置能够纠正发生偏移的晶圆相对于标准位置参数的偏移。
为解决上述技术问题,本发明实施例提供一种晶圆调节装置,包括:承载部件,所述承载部件包括承载晶圆的第一承载组件和第二承载组件,所述第一承载组件位于所述第二承载组件上方,所述第一承载组件具有容置所述第二承载组件的容纳空间,所述第二承载组件相对于所述第一承载组件可活动和所述第一承载组件相对于所述第二承载组件可活动;侦测装置,所述侦测装置设置在所述承载部件上,且所述第一承载组件和所述第二承载组件位于所述侦测装置的侦测范围之内,所述侦测装置用于侦测所述晶圆以获取侦测信息;调整装置,所述调整装置连接所述第一承载组件和所述第二承载组件,带动所述第一承载组件相对于所述第二承载组件活动和带动所述第二承载组件相对于所述第一承载组件活动;分析控制器,所述分析控制器与所述侦测装置和所述调整装置连接,所述分析控制器接收所述侦测装置的侦测信息,对所述侦测信息进行分析处理,并根据处理结果对所述调整装置发出处理信号,所述调整装置根据所述处理信号带动所述第一承载组件相对于所述第二承载组件活动和带动所述第二承载组件相对于所述第一承载组件活动。
另外,所述侦测装置包括:分别位于所述承载部件相对两侧的光发射器件和光感应器件;在所述侦测装置工作期间,所述光发射器件发出的检测光线的传输路径与所述晶圆边缘具有交点。
另外,所述第一承载组件可相对于所述第二承载组件水平移动,所述第二承载组件可向朝向所述第一承载组件的方向升起和向远离所述第一承载组件的方向下降。
另外,所述侦测装置包括数据分析单元,所述数据分析单元用于判断是否可以根据当前侦测到的所述晶圆的位置信息得到所述晶圆的初始位置坐标信息。
另外,所述晶圆调节装置还包括:感应装置,所述感应装置设置在所述第一承载组件上;所述分析控制器与所述感应装置连接,所述分析控制器接收所述感应装置的感应信息,对所述感应信息进行分析处理。
相应的,本发明实施例还提供一种晶圆调节方法,包括:提供上述晶圆调节装置;提供晶圆,所述晶圆承载在第一承载组件上,且所述晶圆的中心轴线处于初始位置,所述第一承载组件的中心轴线处于预设位置;侦测装置获取所述晶圆的初始位置坐标信息;所述分析控制器基于所述晶圆的初始位置坐标信息计算所述初始位置相对于所述预设位置的偏移量,发出调节信号;调整装置和接收所述调节信号,并根据所述调节信号调节所述第一承载组件和第二承载组件,以使所述第一承载组件的中心轴线和所述晶圆的中心轴线处于所述预设位置。
另外,所述侦测装置获取所述晶圆的初始位置坐标信息,具体包括:所述侦测装置侦测所述第一承载组件是否承载有所述晶圆;所述分析控制器根据接收到的所述侦测信息判断所述第一承载组件是否承载有所述晶圆;若有,所述分析控制器对所述调节装置发出处理信号,将所述晶圆从所述第一承载组件上转移到第二承载组件上,且控制所述第二承载组件绕预设位置旋转;所述侦测装置侦测所述晶圆的在旋转过程中的位置信息,并获取所述晶圆的初始位置坐标信息。
另外,调整装置根据所述调节信号调节所述第一承载组件和第二承载组件,以使所述第一承载组件的中心位置和所述晶圆的中心位置处于所述预设位置,具体包括:所述调整装置根据所述调节信号带动所述第一承载组件相对于第二承载组件活动,使得所述第一承载组件的中心轴线由所述预设位置活动到所述初始位置;所述调整装置还根据所述调节信号带动所述第二承载组件相对于所述第一承载组件活动,使得所述第一承载组件活动到所述初始位置后,将所述晶圆从所述第二承载组件转移到所述第一承载组件上;所述调整装置还根据所述调节信号,带动所述第一承载组件活动到所述预设位置,使得所述晶圆活动至所述预设位置。
另外,所述初始位置坐标信息包括当前角度值,所述分析控制器存储有标准角度值;在所述晶圆活动至所述预设位置后,所述调整装置根据所述调节信号还执行如下动作:带动所述第二承载组件相对于所述第一承载组件活动,使所述晶圆从所述第一承载组件转移至所述第二承载组件上;控制所述第二承载组件旋转,使所述晶圆的当前角度值等于所述标准角度值;带动所述第二承载组件相对于所述第一承载组件活动,使所述晶圆从所述第二承载组件转移至所述第一承载组件上。
相应的,本发明实施例还提供一种晶圆传送系统,包括:上述晶圆调节装置;还包括:晶圆传送台,用于承载并传送晶圆;晶圆偏移检测装置,用于检测位于所述晶圆传送台上的晶圆是否发生偏移;晶圆转移装置,用于在所述晶圆偏移检测装置检测到所述晶圆发生偏移时,将所述晶圆转移至所述晶圆调节装置中,且还用于将所述晶圆从所述晶圆调节装置转移至所述晶圆传送台上。
与现有技术相比,本发明实施例提供的技术方案具有以下优点:
上述技术方案中,提供了一种新的晶圆调节装置,该晶圆调节装置能够对发生偏移的晶圆的偏移情况进行检测,并根据偏移量进行相应的位置调节。
另外,光发射器件发出的检测光线的传输路径与晶圆边缘具有交点,在第一承载组件或第二承载组件旋转过程中,侦测装置通过检测交点的位置能够获得晶圆的初始位置坐标信息。
另外,数据分析单元的设置使得侦测装置能够侦测较少的位置信息并获取晶圆的初始位置坐标信息,有利于缩短调节耗时。
附图说明
一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,除非有特别申明,附图中的图不构成比例限制。
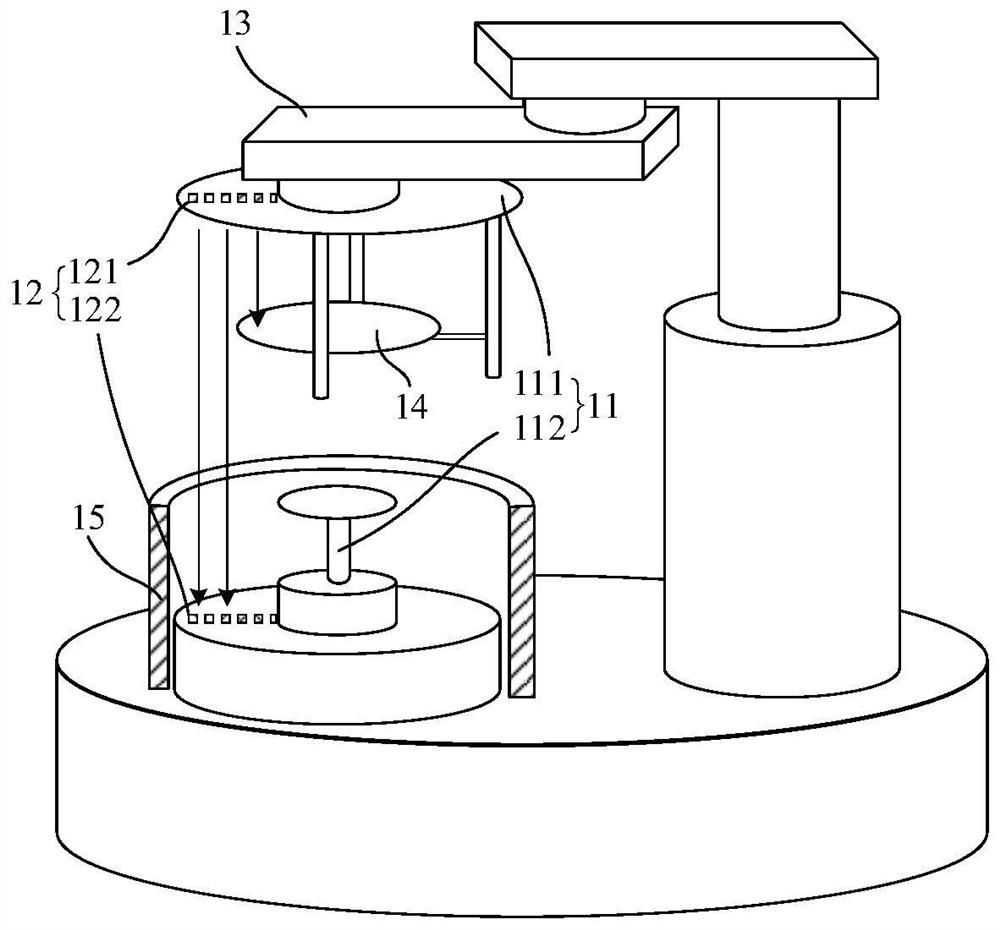
图1为本发明一实施例提供的一种晶圆调节装置的结构示意图;
图2为图1所示结构的晶圆位置平面图;
图3~图4以及图6~图8为本发明一实施例提供的一种晶圆调节方法各步骤对应的动作示意图;
图5为图4所提供的晶圆调节方法中一步骤对应的数据曲线图。
具体实施方式
本发明实施例提供一种晶圆调节装置,该晶圆调节装置能够对发生偏移的晶圆的偏移情况进行检测,并根据偏移量进行相应的位置调节。
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的各实施例进行详细的阐述。然而,本领域的普通技术人员可以理解,在本发明各实施例中,为了使读者更好地理解本申请而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施例的种种变化和修改,也可以实现本申请所要求保护的技术方案。
图1为本发明一实施例提供的一种晶圆调节装置的结构示意图。
参考图1,晶圆调节装置包括:承载部件11,承载部件11包括承载晶圆14的第一承载组件111和第二承载组件112,第一承载组件111位于第二承载组件112上方,第一承载组件111具有容置第二承载组件112的容纳空间,第二承载组件112相对于第一承载组件111可活动和第一承载组件111相对于第二承载组件112可活动;侦测装置12,侦测装置12设置在承载部件11上,且第一承载组件111和第二承载组件112位于侦测装置12的侦测范围之内,侦测装置12用于侦测晶圆14以获取侦测信息;调整装置13,调整装置13连接第一承载组件111和第二承载组件112,带动第一承载组件111相对于第二承载组件112活动和带动第二承载组件112相对于第一承载组件111活动;分析控制器(未图示),分析控制器与侦测装置12和调整装置13连接,分析控制器接收侦测装置12的侦测信息,对侦测信息进行分析处理,并根据处理结果对调整装置13发出处理信号,调整装置13根据处理信号带动第一承载组件111相对于第二承载组件111活动和带动第二承载组件112相对于第一承载组件111活动。
以下将结合附图对本实施例提供的晶圆调节装置进行详细说明。
具体地,承载部件11包括第一承载组件111和第二承载组件112,第一承载组件111的中心轴线为承载部件11的中心轴线,第一承载组件111中具有容纳第二承载组件112和晶圆14的容纳空间;当处于传送状态的晶圆14发生偏移后,发生偏移的晶圆14被置于第一承载组件111上,使得第一承载组件111承载晶圆14;在对晶圆14的位置进行调节之前,晶圆14的中心轴线处于初始位置,第一承载组件111的中心轴线处于预设位置。
需要说明的是,在其他实施例中,当处于传送状态的晶圆发生偏移后,发生偏移的晶圆被置于第二承载组件上;其中,第二承载组件位于容纳空间内。
第一承载组件111包括主体部(未标示)和若干支撑架(未标示),主体部的中心轴线为承载部件11的中心轴线;支撑架与主体部连接,且每一支撑架上具有承载晶圆14的支撑部,支撑部与主体部之间具有上述容纳空间。其中,主体部的中心轴线与第二承载组件112的中心轴线重合;第二承载组件112具有可伸缩性。
本实施例中,支撑架为包括三点式或三爪式,三点式支撑架指的是支撑部至少支撑晶圆14的三个点,以保证晶圆14的平衡;三爪式支撑架指的是三个支撑部构成三爪状,三个支撑部具有交点,通常两侧的爪状支撑部较长且与晶圆14平面接触,中间爪状较短。
本实施例中,第一承载组件111可相对于第二承载组件112水平移动;第二承载组件112可以向朝向第一承载组件111的方向升起或者向远离第一承载组件111的方向降下,第二承载组件112升起会使晶圆14与第一承载组件111分离,并使晶圆14位于容纳空间;此外,第二承载组件112还可以绕预设位置旋转。
需要说明的是,在其他实施例中,第一承载组件可以绕预设位置旋转。
侦测装置12用于侦测晶圆14以获取侦测信息,第一承载组件111和第二承载组件112位于侦测装置12的侦测范围内。侦测信息包括晶圆14的初始位置坐标信息,分析控制器根据初始位置坐标信息和预设位置坐标信息得到晶圆14的中心位置偏移情况;此外,晶圆14边缘具有晶圆缺口,初始位置坐标信息包括当前角度值,分析控制器存储有标准角度值,分析控制器根据当前角度值和标准角度值得到缺口的角度偏移量。需要说明的是,缺口的角度偏移量以及初始位置相对于预设位置的偏移量都是矢量。
本实施例中,侦测装置12包括数据分析单元(未图示),数据分析单元用于判断是否可以根据当前侦测到的晶圆14的位置信息得到晶圆14的初始位置坐标信息;若是,则得到初始位置坐标信息并发送至分析控制器。
本实施例中,侦测装置12包括:光发射器件121,光发射器件121用于发射检测光线;光感应器件122,在侦测装置12工作期间,光发射器件121和光感应器件122分别位于晶圆14相对的两侧,且检测光线的传输路径与晶圆14边缘具有交点,光感应器件122接收未被晶圆14阻拦的检测光线,并根据接收的检测光线分析出晶圆14的初始位置坐标信息。
本实施例中,光发射器件121包括多个中心处于同一直线上的发光单元,光发射器件121发射的检测光线与晶圆14边缘具有一交点;在其他实施例中,光发射器件发出的检测光线与晶圆边缘具有多个交点,或者光发射器件发出的检测光线覆盖晶圆整个边缘。
在一个具体实施例中,第一承载组件111上设置有感应装置(未图示),感应装置与分析控制器连接,分析控制器对感应装置发送的感应信息进行分析处理,从而判断出所述第一承载组件111是否承载有晶圆14。
本实施例中,在光感应器件122的周围布置有遮光壁15,遮光壁15用于阻隔外部光线,从而保证光感应器件122接收到的光线仅来源于光发射器件121。
调整装置13的移动端与主体部连接,调整装置13通过带动主体部运动,调整第一承载组件111的位置。本实施例中,调整装置13包括两个移动臂和对应的旋转轴。
为便于理解和说明晶圆调节装置,以下将通过晶圆调节装置的工作原理,对晶圆调节装置进行更详细的说明。
在一个具体实施例中,光发射器件121以固定频率或者实时发射检测光线,光感应器件122接收检测光线;侦测装置12将接收到的检测光线的相关信息发送至分析控制器,分析控制器接收该侦测信息,并对侦测信息进行分析处理。
可以理解的是,若检测光线未被晶圆14阻隔,全部检测光线被光感应器件122接收,则可以认为第一承载组件111未承载晶圆14;若检测光线被部分阻隔,光感应器件122仅能接收部分检测光线,则认为第一承载组件111承载晶圆14。因此,分析控制器根据连续两次接收到的检测光线的信息,可以判断出第一承载组件111是否承载有新的晶圆14。
若第一承载组件111承载有晶圆14,则侦测装置12开始获取晶圆14的初始位置坐标信息,参考图2~图5,承载部件11带动晶圆14旋转,光感应器件122根据接收到的检测光线得到晶圆14的初始位置坐标信息。本实施例以初始位置与预设位置不重合且当前角度值与标准角度值不相同作为示例:
参考图2,实线圆为发生偏移的晶圆14的位置,E点为预设位置,A点为实线圆上距离E点的最远点,B点为实线圆上距离E点的最近点;虚线圆为发生偏移的晶圆14需要调节至的位置,C1点为发生偏移的晶圆14上的缺口的位置;C2点为缺口在调节后的位置;D点为光发射器件121(参考图1)发出的检测光线与晶圆14边缘的交点。
参考图3,本实施例中,若分析控制器判断出第一承载组件111承载有晶圆14,则分析控制器控制第二承载组件112升起并支撑晶圆14,使晶圆14处于容纳空间内;在其他实施例中,可通过其他方式或结构判断第一承载组件是否承载有晶圆,如重量感应器件等。
参考图4,在分析控制器判断出第一承载组件111承载有晶圆14之后,光感应器件122控制第二承载组件112绕预设位置旋转,以带动晶圆14绕预设位置旋转。在其他实施例中,也可以为控制第一承载组件绕预设位置旋转,相应的,无需利用第二承载组件承载晶圆。
第二承载组件112绕预设位置旋转时,检测光线与晶圆14边缘的交点D(参考图2)的位置会随着晶圆14的转动而发生改变;光感应器件122根据接收到的检测光线判断交点D与预设位置之间的距离,可根据光感应器件122所获取的距离参数以及第二承载组件112的旋转角度得到旋转角度与距离的函数关系,进而获取晶圆14的初始位置坐标情况。
参考图5,曲线41为晶圆14旋转一周后的角度δ-距离y曲线;曲线42为无偏移的理想晶圆位置旋转一周会得到的角度δ-距离y曲线,曲线42预存于分析控制器中,通过对比曲线41和曲线42即可得到晶圆14的初始位置相对于预设位置的偏移量以及晶圆14的当前角度值相较于标准角度值的角度偏移量。
具体地,设定第二承载组件112的旋转方向为顺时针,晶圆14旋转角度为δ,晶圆14旋转角度对应的距离为y,边缘交点D的坐标为(δ,y)。其中,第二承载组件112旋转一周,则0°≤δ<360°;δ=α时,y取最大值至y
本实施例中,晶圆14在旋转一周后回到原位置,所测得的偏移情况等于旋转后位置的偏移情况,分析控制器基于测得的偏移情况调节晶圆14的位置。
在本发明另一实施例中,侦测装置12还包括数据分析单元,数据分析单元用于判断是否可以根据当前所获取的检测光线获取晶圆14的位置偏移情况;若是,则停止旋转第二承载组件112,并计算得到晶圆14的初始位置坐标信息。
需要说明的是,数据分析单元所测得的初始位置坐标信息是晶圆14在旋转前的初始位置坐标信息,因此,在对晶圆14进行位置调节之前,需要根据测得的初始位置坐标信息以及第二承载组件112的旋转角度计算出晶圆14旋转后的初始位置坐标信息,分析控制器基于旋转后的初始位置坐标信息调节晶圆14的位置。
可以理解的是,由于晶圆14的轮廓通常为圆形,且圆形轮廓上通常具有一缺口(Notch),缺口在后续制作工艺中起到定位作用。以晶圆14内任一点作为原点进行旋转,所得到的角度δ-距离y曲线除缺口位置以外为正弦曲线,正弦曲线公式y=Asin(ωx+φ)+k具有四个未知量,由此可知,光感应器件122最少可以根据接收到的四组数据得到除C1点以外的其余晶圆14边缘点的位置;此外,由于缺口处的角度δ-距离y对应关系不满足正弦曲线,因此,光感应器件122需要得到至少六个侧边点的角度δ-距离y参数,并通过每四个值建立一个方程的方式找到缺口位置所对应的点(即C1点),当光感应器件122接收到C1点的位置参数时,侦测模块12可根据当前所得到的角度δ-距离y参数得到晶圆14的位置,进而获取晶圆14的偏移情况,偏移情况包括初始位置相较于预设位置的偏移量以及当前角度值相对于标准角度值的角度偏移量。
在侦测装置12获取晶圆14的初始位置坐标信息后,分析控制器根据初始位置坐标信息和预设位置坐标信息以及预存的标准角度值得到偏移情况,并基于偏移情况向调整装置13发送处理信号并控制调整装置13,从而使得第一承载组件111的中心轴线处于初始位置。参考图6~图8,本实施例以初始位置与预设位置不重合,且当前角度值不等于标准角度值作为示例:
参考图6,分析控制器基于初始位置与预设位置的偏移量控制调整装置13移动,从而使得第一承载组件111的中心轴线处于初始位置,此时第一承载组件111的中心轴线与晶圆14的中心轴线重合;参考图7,分析控制器控制第二承载组件112降下,以使第一承载组件111支撑晶圆14,从而使得第一承载组件111能够携带晶圆14移动;参考图8,分析控制器再次控制调整装置13移动,以使第一承载组件111的中心轴线以及晶圆14的中心轴线处于预设位置。
如此,晶圆14的中心轴线的位置得以纠正;此外,第一承载组件111的中心轴线依旧处于预设位置,使得在后续的晶圆14转移步骤中,无需获取第一承载组件111中心轴线的位置,有利于实现晶圆14承载与转移的自动化。
需要说明的是,调整装置13既可以通过自身的移动带动第一承载组件111移动;也可以通过指令信号或者其他动作控制第一承载组件111移动。
在第一承载组件111的中心轴线以及晶圆14的中心轴线处于预设位置后,还需要对缺口的角度值进行调节,具体包括:分析控制器控制第二承载组件112升起并支撑晶圆14,分析控制器基于当前角度值相对于标准角度值的角度偏差值控制第二承载组件112旋转,第二承载组件112旋转以带动晶圆14旋转,进而使得缺口的角度等于标准角度值。
需要说明的是,在其他实施例中,在第一承载组件的中心轴线以及晶圆的中心轴线处于预设位置后,分析控制器控制第一承载组件旋转,第一承载组件旋转以带动晶圆旋转,进而使得晶圆缺口的角度等于标准角度值。
本实施例中,提供了一种新的晶圆调节装置,该晶圆调节装置能够对置于承载部件上的发生偏移的晶圆的位置进行调节,以纠正晶圆的位置偏移情况。
相应的,本发明实施例还提供了一种利用上述晶圆调节装置进行晶圆调节的方法,包括:提供一台上述晶圆调节装置;提供晶圆,所述晶圆承载在第一承载组件上,且所述晶圆的中心轴线处于初始位置,所述第一承载组件的中心轴线处于预设位置;侦测装置获取所述晶圆的初始位置坐标信息;分析控制器基于所述晶圆的初始位置坐标信息计算所述初始位置相对于所述预设位置的偏移量,发出调节信号;调整装置接收所述调节信号,并根据所述调节信号调节所述第一承载组件和第二承载组件,以使所述第一承载组件的中心轴线和所述晶圆的中心轴线处于所述预设位置。
以下将结合附图中图3~图4、图6~图8进行详细说明。具体地,承载部件11包括第一承载组件111和第二承载组件112,在对晶圆14的位置进行调节之前,第一承载组件111承载晶圆14,晶圆14的中心轴线处于初始位置,承载部件11的中心线处于预设位置。
侦测装置12包括光发射器件121和光感应器件122,光反射器件121用于发射检测光线;在侦测装置12工作期间,光反射器件121和光感应器件122分别位于晶圆14相对的两侧,且检测光线的传输路径与晶圆14的边缘具有交点。
参照图3~图4,侦测装置12获取晶圆14的初始位置坐标信息,具体包括:侦测装置12侦测第一承载组件111是否承载有晶圆14;分析控制器根据接收到的侦测信息判断第一承载组件111是否承载有晶圆14;侦测装置12控制第二承载组件112升起并支撑晶圆14;侦测装置12控制第二承载组件112绕预设位置旋转,以带动晶圆14旋转,在晶圆14旋转过程中,光感应器件122根据接收到的检测光线获取晶圆14的初始位置坐标信息。
本实施例中,晶圆14具有缺口,晶圆14的偏移情况包括初始位置相对于预设位置的偏移量,还包括缺口的角度偏移量。具体地,分析控制器存储有标准角度值,且根据标准角度值和光感应器件122获取的当前角度值得到缺口的角度偏移量。
本实施例以初始位置与预设位置不重合且当前角度值与标准角度值不等为例进行说明,调节晶圆14的位置以纠正晶圆14的偏移情况的具体步骤包括:
参考图6,分析控制器基于初始位置与预设位置的偏移量控制调整装置13移动,以使第一承载组件111的中心轴线处于初始位置;参考图7,分析控制器控制第二承载组件112降下,以使第一承载组件111支撑晶圆14;参考图8,分析控制器再次控制调整装置13移动,以使第一承载组件111的中心轴线以及晶圆14的中心轴线处于预设位置。
在第一承载组件111的中心轴线以及晶圆14的中心轴线处于预设位置后,还需要对缺口的角度值进行调节,具体包括:分析控制器存储有标准角度值,分析控制器控制第二承载组件112升起并支撑晶圆14,分析控制器基于当前角度值相对于标准角度值的角度偏差值控制第二承载组件112旋转,第二承载组件112旋转以带动晶圆14旋转,进而使得缺口的角度等于标准角度值。
需要说明的是,在其他实施例中,在第一承载组件的中心轴线以及晶圆的中心轴线处于预设位置后,分析控制器控制第一承载组件旋转,第一承载组件旋转以带动晶圆旋转,进而使得晶圆缺口的角度等于标准角度值。
本实施例提供了一种新的晶圆调节方法,该晶圆调节方法能够对发生偏移的晶圆的偏移情况进行检测,并根据偏移情况对晶圆进行相应的位置调节;且在调节晶圆前后,使得承载部件的中心轴线处于同一位置,有利于实现晶圆转移的自动化。
相应的,本发明实施例还提供了一种晶圆传送系统,包括上述晶圆调节装置,还包括:晶圆传送台,用于承载并传送晶圆;晶圆偏移检测装置,用于检测位于所述晶圆传送台上的晶圆是否发生偏移;晶圆转移装置,用于在所述晶圆偏移检测装置检测到所述晶圆发生偏移时,将所述晶圆转移至所述晶圆调节装置中,且还用于将所述晶圆从所述晶圆调节装置转移至所述晶圆传送台上。
晶圆传送台承载并传送晶圆时,晶圆偏移检测装置实时检测或以固定频率检测位于晶圆传送台上的晶圆是否发生偏移;当晶圆偏移检测装置检测到晶圆发生偏移时,晶圆转移装置将发生偏移的晶圆转移至晶圆调节装置的承载部件上;且在发生偏移的晶圆完成调节后,转移装置将置于承载部件上的晶圆转移至晶圆传送台上。
需要说明的是,晶圆在传送带上的理想位置(即发生偏移前的位置)与晶圆调节装置中的预设位置具有对应关系,晶圆转移装置根据该对应关系转移晶圆,也就是说,传送带上发生偏移的晶圆相对于理想位置的偏移量和转移后晶圆相对于预设位置的偏移量是相等的。
本实施例中,晶圆转移装置可以同时转移多张晶圆。具体地,晶圆转移装置能够承载有多张发生偏移的晶圆,在晶圆转移装置内的多张晶圆按照预设规则排序。当晶圆转移装置将晶圆转移至晶圆调节装置中时,晶圆转移装置按照预设顺序将第一张发生偏移的晶圆置于晶圆调节装置中;当该发生偏移的晶圆完成调节后,晶圆转移装置重新承载该晶圆,并将第二张发生偏移的晶圆置于晶圆调节装置中,如此重复进行,直至所有发生偏移的晶圆都完成调节;在重新承载所有晶圆后,晶圆转移装置按照预设顺序将多张晶圆置于传送台上。
本发明实施例提供了一种晶圆传送系统,在无需人工干预的情况下,使得在传送台上发生偏移的晶圆的位置能够被纠正,从而保证晶圆的良率。
本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各自更动与修改,因此本发明的保护范围应当以权利要求限定的范围为准。
- 晶圆盒、晶圆传送系统及晶圆传送方法
- 晶圆传送装置、晶圆传送装置的控制方法及晶圆加工设备