车辆高度调节装置
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及一种车辆高度调节装置。
背景技术
以往,在车辆高度调节装置中,例如,如JP2007-253862A所公开的那样,其具备:电机;以及进给丝杠机构,其用于驱动上方弹簧座,该上方弹簧座用于支承利用电机的旋转动力来弹性支撑车辆车身的悬架弹簧的一端。在此车辆高度调节装置中,驱动电机使上方弹簧座上下移动以使上方弹簧座接近或离开车身,从而调节车辆高度。
发明概要
在传统的车辆高度调节装置中,经由齿轮机构将电机的动力传递给进给丝杠机构,但是由于齿轮存在齿隙并产生游隙,因此,当通过使弹簧座靠近或远离车身以施加载荷时,齿轮的齿相互碰撞并产生异常噪声。
因此,本发明的目的在于提供一种能够抑制异常噪声的产生的车辆高度调节装置。
为了实现上述目的,本发明提供一种车辆高度调节装置,其具备:运动转换部,其具有旋转部件和直动部件并且将旋转部件的旋转运动转换为直动部件的直线运动;多台电机;从动侧齿轮,其与旋转部件相连结;多个驱动侧齿轮,其分别由各台电机驱动且与从动侧齿轮相啮合;以及弹簧座,其与直动部件相连结并用于支撑插装于车辆车身与车轴之间的悬架弹簧的一端;在驱动弹簧座并使其停止后,将驱动侧齿轮中一部分的驱动侧齿轮向与所述弹簧座的驱动方向相反的方向驱动,或者,在将驱动侧齿轮中一部分的驱动侧齿轮向弹簧座的驱动方向驱动的同时,将驱动侧齿轮中剩余的驱动侧齿轮向与弹簧座的驱动方向相反的方向驱动。
附图说明
图1是一实施方式中的车辆高度调节装置的纵向截面图。
图2是一实施方式中的车辆高度调节装置的横向截面图。
图3是一实施方式中的车辆高度调节装置的第一变形例的横向截面图。
图4是驱动弹簧座并停止后的从动侧齿轮及驱动侧齿轮的平面图。
图5是驱动弹簧座并停止后,在驱动驱动侧齿轮的状态下的从动侧齿轮及驱动侧齿轮的平面图。
具体实施方式
下面,将参照附图对本发明的车辆高度调节装置1进行说明。如图1和图2所示,一实施方式中的车辆高度调节装置1具备:运动转换部2,其将旋转运动转换为直动部件的直线运动;多台电机M1、M2;传递部3,其将电机M1、M2的动力传递到所述旋转部件;以及弹簧座7,其由运动转换部2驱动。
下面,将对车辆高度调节装置1的各部分进行详细说明。运动转换部2具备:丝杠轴2a,其用作旋转部件;以及滚珠螺母2b,其用作直动部件。丝杠轴2a在外周上设有螺纹槽,并在外周上螺合有滚珠螺母2b。因此,在此运动转换部2中,当丝杠轴2a呈现旋转运动时,滚珠螺母2b在图1中的上下方向上呈现直线运动。此外,在滚珠螺母2b的外周上安装有与弹簧座7相连结的筒状支架6。
如前所述,支架6为筒状,具备:衬套6a,其在图1中下端内周上可枢转地支撑丝杠轴2a;以及防尘密封件6b,其与丝杠轴2a的外周滑动接触并密封支架6。
丝杠轴2a的图1中上端插通在用于容纳传递部3的壳体8内,并且由轴承9支撑,从而使其能够相对于壳体8绕轴旋转。
壳体8安装在车辆车身上并成为内部中空且容纳传递部3的壳体,并且,在图1中下端具备插入在支架6的外周和弹簧座7的筒部7a的内周之间的导向筒8a。而且,在导向筒8a和弹簧座7的筒部7a之间插入有筒状衬套10,弹簧座7、支架6以及滚珠螺母2b由壳体8的导向筒8a引导而不会发生轴向晃动,并且能够向图1中上下方向的轴向平滑地移动。此外,支架6具备用于可枢转地支撑丝杠轴2a的图1中下方的衬套6a,相对于壳体8通过导向筒8a抑制偏心,并且丝杠轴2a的上方通过设置在壳体8上的轴承9可枢转地支撑。因此,丝杠轴2a能够相对于壳体8和滚珠螺母2b而不偏心地平滑地旋转运动。
更进一步地,在导向筒8a的内周上沿着图1中上下方向的轴向形成有键槽8b,在键槽8b内插入有安装于支架6的图1中上端外周上的键6c。因此,由于防止了滚珠螺母2b相对于壳体8的旋转,因此若旋转驱动丝杠轴2a,则无需与丝杠轴2a一起旋转就能够可靠地轴向移动。
弹簧座7支撑安装在未图示的车辆车身和车轮之间的悬架弹簧S的车身侧端即上端,在上下方向上驱动运动转换部2的滚珠螺母2b,并且使其上下移动以靠近或远离未图示的车身。悬架弹簧S的下端由安装在车轮侧的悬架构件上的下方弹簧座40支撑。因此,若旋转驱动丝杠轴2a以使滚珠螺母2b在上下方向移动时,则通过弹簧座7远离或靠近车身以便可以调节车高。另外,弹簧座7具备在底部具备孔的有底筒状筒部7a和设置在筒部7a的图1中上端外周的凸缘7b,并且由凸缘7b支撑悬架弹簧S的上端。而且,在支架6的图1中下端嵌合于筒部7a的底部的状态下,弹簧座7与支架6一体化。
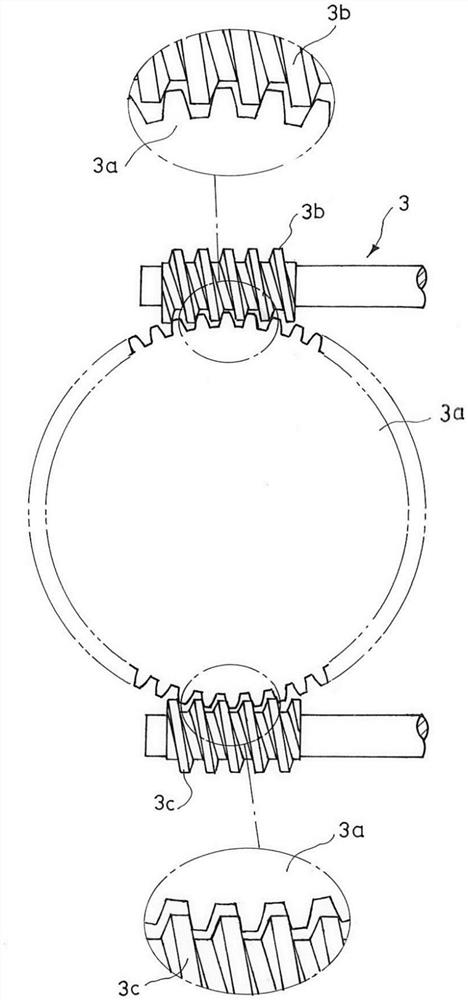
在本实施方式中,如图1和图2所示,传递部3由作为从动侧齿轮的蜗轮3a和作为驱动侧齿轮的一对蜗杆3b、3c构成,其中,该蜗轮安装在丝杠轴2a的上端外周上,而该一对蜗杆在直径方向上夹持蜗轮3a并与蜗轮3a啮合。蜗轮3a能够与丝杠轴2a一起在壳体8内旋转。蜗杆3b与固定在壳体8的图2中右方的电机M1的未图示的转子相连结,而蜗杆3c与同样固定在壳体8的图2中右方的电机M2的未图示的转子相连结。
在本实施方式中,当使蜗轮3a在图2中的逆时针旋转时,在电机M1中,图2中上侧的蜗杆3b从电机M1侧观察时其向左旋转,在电机M2中,图2中下侧的蜗杆3c从电机M2侧观察时其向右旋转。相反地,当使蜗轮3a在图2中顺时针旋转时,在电机M1中,图2中上侧的蜗杆3b从电机M1侧观察时其向右旋转,在电机M2中,图2中下侧的蜗杆3c从电机M2侧观察时其向左旋转即可。当以这种方式驱动并旋转驱动蜗轮3a时,则丝杠轴2a与蜗轮3a一起旋转以使其可以在上下方向上驱动滚珠螺母2b,并且通过滚珠螺母2b的上下移动以使弹簧座7向上下方向移动并远离或靠近车身。因此,当驱动电机M1,M2时,可以调节弹簧座7与车身之间的相对距离,从而车辆高度调节装置1可以调节车辆的车高。另外,在本说明书中,蜗杆3b、3c的旋转方向始终是指向从电机M1、M2观察蜗杆3b、3c时的旋转方向。
在本实施方式中,电机M1、M2为相同规格的电机,并且为直流电机,其通过接收来自未图示的电源的电力供给而旋转驱动。另外,电机M1、M2也可以不是相同规格的电机,但是如果利用相同规格的电机,则当以等速驱动蜗杆3b、3c时,变得易于管理电流和转矩。另外,电机M1、M2由图外的控制装置控制,并且相互独立地旋转驱动,其可以独立地向左右中的任一方旋转驱动蜗杆3b、3c。
而且,在本实施方式中,无论蜗轮3a是顺时针旋转还是逆时针旋转,蜗杆3b、3c都向相互相反的方向旋转,因此,将电机M1、M2向相互相反的方向驱动而将弹簧座7向所期望的位置驱动。另外,如图3所示,当蜗杆3b、3c在与蜗轮3a相反的方向上相互啮合时,蜗轮3a既可以顺时针旋转,也可以逆时针旋转,由于蜗杆3b、3c向彼此相同的方向旋转,因此在此情况下,只要将电机M1、M2向彼此相同的方向驱动而将弹簧座7向所期望的位置驱动即可。
而且,当以这种方式驱动弹簧座7并使弹簧座7移位到所期望的位置以使电机M1、M2停止时,弹簧座7停止在所期望的位置上。当为了使弹簧座7移动而将蜗轮3a向图2中逆时针方向驱动时,则当使蜗杆3b、3c停止时,如图4所示,蜗杆3b、3c的齿处于从蜗轮3a的中心观察仅与蜗轮3a的齿的图4中右侧的侧面相接触的状态。
相反地,当为了使弹簧座7移动而将蜗轮3a向图2中顺时针方向驱动时,则当使蜗杆3b、3c停止时,蜗杆3b、3c的齿处于从蜗轮3a的中心观察仅与蜗轮3a的齿的左侧的侧面相接触的状态。在此状态下,在蜗轮3a和蜗杆3b、3c的齿之间存在齿隙部分的游隙,蜗轮3a仅能够在周向上旋转齿隙部分。
因此,在本实施方式中,在驱动弹簧座7以使其移位到所期望的位置并使电机M1、M2停止后,车辆高度调节装置1将电机M1或电机M2中的任一个朝向与此前为了调整车高而驱动弹簧座7的旋转方向不同的反方向驱动并使其停止。图5显示图4所示的状态,即从使蜗轮3a逆时针旋转并停止的状态到与此前相反地向顺时针驱动蜗轮3a的方向驱动蜗杆3b并停止的状态。如图5所示,仅旋转驱动蜗杆3b以齿隙的量,从蜗轮3a的中心观察,在此齿与蜗轮3a的齿的图4中左侧的侧面相接触的状态下停止。另一方面,未被驱动的蜗杆3c的齿依然处于与蜗轮3a的齿的右侧的侧面相接触的状态。当以这种方式使蜗杆3b、3c处于与蜗轮3a相接触的状态时,即使蜗轮3a要旋转,蜗轮3a的齿也会与蜗杆3b或蜗杆3c的齿啮合而不能旋转。另外,当顺时针驱动蜗轮3a以使弹簧座7移动时,只要朝向逆时针驱动蜗轮3a的方向驱动蜗杆3b、3c中的一个即可,如此一来,即使要旋转蜗轮3a,蜗轮3a的齿也会与蜗杆3b或蜗杆3c的齿啮合而不能旋转。
因此,在以这种方式旋转驱动电机M1、M2后并使其停止,进而向与此前相反的方向驱动电机M1、M2中的任一个并使其停止时,则蜗轮3a和蜗杆3b、3c如前所述那样地啮合,并且蜗轮3a无法旋转。另外,也可以在旋转驱动电机M1、M2后并使其停止,进而,在为了使弹簧座7移动而朝向与此前驱动的方向(驱动方向)相同的方向驱动电机M1、M2中的任一个的同时,向与所述驱动方向相反的方向驱动电机M1、M2中的另一个并使其停止。于是,蜗轮3a和蜗杆3b、3c如前所述那样地啮合,而蜗轮3a不能旋转。
如此一来,本发明的车辆高度调节装置1具备:运动转换部2,其具有丝杠轴(旋转部件)2a和滚珠螺母(直动部件)2b并且将丝杠轴(旋转部件)2a的旋转运动转换为滚珠螺母(直动部件)2b的直线运动;多台电机M1、M2;蜗轮(从动侧齿轮)3a,其与丝杠轴(旋转部件)2a相连结;多个蜗杆(驱动侧齿轮)3b、3c,其分别由各台电机驱动M1、M2且与蜗轮(从动侧齿轮)3a相啮合;以及弹簧座7,其与滚珠螺母(直动部件)2b相连结并用于支撑插装于车辆车身与车轴之间的悬架弹簧S的一端;在驱动弹簧座7并使其停止后,将蜗杆(驱动侧齿轮)3b、3c中一部分的驱动侧齿轮向与弹簧座7的驱动方向相反的方向驱动,或者,在将蜗杆(驱动侧齿轮)3b、3c中一部分的驱动侧齿轮向弹簧座7的驱动方向驱动的同时,将蜗杆(驱动侧齿轮)3b、3c中剩余的驱动侧齿轮向与弹簧座7的驱动方向相反的方向驱动。
在以这种方式构成的车辆高度调节装置1中,在使弹簧座7停止在所期望的位置后,可以使多个蜗杆(驱动侧齿轮)3b、3c以不使蜗轮(从动侧齿轮)3a旋转的方式与蜗轮(从动侧齿轮)3a啮合。因此,根据车辆高度调节装置1,蜗轮(从动侧齿轮)3a的游隙消失而不能旋转,从而阻止蜗轮(从动侧齿轮)3a与多个蜗杆(驱动侧齿轮)3b、3c的碰撞,因此可以抑制异常噪声的产生。
另外,在前述说明中,传递部3由作为从动侧齿轮的蜗轮3a和作为驱动侧齿轮的蜗杆3b、3c构成,但是只要具备从动侧齿轮和驱动侧齿轮即可,因此也可以由其他齿轮机构构成。此外,驱动侧齿轮也可以设置三个以上,电机的设置数量为与驱动侧齿轮相对应的设置数量即可。另外,在多个驱动侧齿轮中,也可以包括只为消除前述的游隙而旋转驱动的驱动侧齿轮,以使弹簧座7向与弹簧座7的驱动方向相反的方向移动。
也就是说,在多个驱动侧齿轮中,也可以具有不用于弹簧座7的驱动而只用于消除前述游隙的齿轮。
此外,运动转换部2将旋转部件作为丝杠轴2a,将直动部件作为滚珠螺母2b,但是也可以将旋转部件作为滚珠螺母2b与传递部3相连接,将直动部件作为丝杠轴2a与弹簧座7相连结。此外,运动转换部2也可以由梯形螺纹螺钉和与梯形螺纹螺钉螺合的螺母构成,在此情况下,也可以将梯形螺纹螺钉和螺母中的一方作为旋转部件并将另一方作为直动部件。
上面已经详细说明了本发明的优选实施方式,但只要不脱离权利要求的范围,就可以进行改造、变形及变更。
本申请要求基于2018年11月26日向日本专利局提交的日本专利申请特愿2018-220072号的优先权,此申请的全部内容通过引用并入本说明书。
- 车辆高度调节装置、用于车辆高度调节装置的控制装置以及控制方法
- 高度调节装置和具有高度调节装置的车辆座椅