终端时间约束下的高超声速飞行器再入制导方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及一种再入制导方法,尤其涉及一种终端时间约束下的高超声速飞行器再入制导方法,属于飞行器制导控制领域。
背景技术
高超声速再入飞行器一般在高度20至100公里的临近空间内飞行,再入速度可以达到20马赫以上,具有射程远、速度快、机动性强等特点,可以用于远程快速打击。不过,远程探测技术的发展与先进防御系统的部署,一定程度上限制了高超声速再入飞行器的突防概率,使其战略威慑力受到影响。为了提升突防概率,必须采取有效的攻击方式,而多飞行器协同攻击正是提高突防能力有效途径。由于再入飞行器射程远、机动范围大,飞行器之间可能相距上千公里,相互通信困难。因此,可行的协同攻击方案是:通过先进的再入制导方法在线控制每个飞行器的终端时间,使所有飞行器在期望时刻同时到达目标点。
目前的再入制导方法主要针对单飞行器,设计时主要考虑热流密度、动压、过载等路径约束以及高度、速度、待飞航程等终端约束。若以待飞航程作为再入段结束条件,则终端约束要求高度、速度、航向角等状态量等于各自的期望值。对于多飞行器协同攻击任务,不仅要求满足常规的终端约束,还要求时间可控,增加的终端时间约束,使再入制导问题变得更为复杂。因此,为了完成高超声速再入飞行器协同打击任务,需要在常规再入制导问题的基础上,研究对终端时间约束下的再入制导方法。
发明内容
本发明的目的是,针对现有再入制导技术不能满足协同攻击任务的终端时间约束的问题,提供一种终端时间约束下的高超声速飞行器再入制导方法,在保证高度、速度、待飞航程、航向角等常规终端约束的基础上,进一步满足终端时间约束。本发明所公开的制导方法能够为高超声速飞行器协同攻击制导问题提供有效解决途径。
本发明的目的是通过下述技术方案实现的。
本发明公开的终端时间约束下的高超声速飞行器再入制导方法,设计了一种参数化的U形的方向角偏差走廊,用于对飞行器航向角与终端时间的控制;采用含有攻角与倾侧角控制剖面补偿的动力学模型与四阶Adams积分方法,对再入终端时间进行预测,并得到时间差;通过在线调整U形走廊的边界宽度系数,消除时间差,实现高超声速飞行器再入终端时间控制。
本发明公开的终端时间约束下的高超声速飞行器再入制导方法,包括如下步骤:
步骤一、针对终端方向角约束与终端时间约束,设计参数化的U形方向角偏差走廊,基于飞行器倾侧角与U形走廊边界的关系,建立高超声速飞行器倾侧角的反转逻辑。
步骤一的具体实现方法为:
首先,定义方向角偏差为飞行器航向角ψ与目标视线角ψ
在球面上,飞行器到目标视线角的计算公式为
其中,θ与φ分别为飞行器的经度与纬度,θ
而后,采用分数阶函数,设计随飞行器速度v减小而减小的U形方向角偏差走廊C(v)如下
C(v)=C
其中,K为边界宽度系数,v
C
其中,系数η在0到1之间取值。
基于所设计的方向角偏差走廊,得到飞行器倾侧角σ的反转逻辑如下
其中,σ
步骤二、再入飞行过程中,结合高超声速再入飞行器动力学方程、控制剖面补偿方法、以及步骤一中设计的U形方向角偏差走廊,利用四阶Adams数值积分方法对飞行轨迹及飞行时间进行预测,当飞行器进入终端区域时积分终止,并得到终端时间预测值。
步骤二的具体实现方法为:
积分时采用考虑地球自转的高超声速再入飞行器动力学方程
其中,r为地心到飞行器质心的距离,γ为弹道倾角,L为升力加速度,D为阻力加速度,g为重力加速度,F
为消除横侧向机动对高度、速度等纵向状态量的影响,轨迹积分时采用的倾侧角和攻角曲线需进行补偿修正,即在标称值的基础上叠加补偿值
其中,α为攻角;α
其中,K
s
其中,R
结合式(6)的动力学方程及式(7-8)的控制剖面,利用四阶Adams积分方法完成再入飞行轨迹的数值积分。积分过程以飞行器进入终端区域为终止条件,当飞行器到目标点的待飞航程s
步骤三、计算步骤二得到的终端时间预测值与终端时间期望值之差,若时间差在允许范围之内,U形方向角偏差走廊给出终端时间约束下的倾侧角反转指令;否则,根据时间差在线调整走廊的边界宽度系数K,使得时间差能够控制在允许范围之内,再由新的U形方向角偏差走廊给出倾侧角反转指令。
步骤三的具体实现方法为:
计算终端时间的预测值t
|Δt|≤Δt
其中,Δt
令最初的边界宽度系数为K
其中,δ为小量。
得到K
利用式(12)给出的迭代方法得到满足式(10)的边界宽度系数,最终由式(5)给出倾侧角反转指令,再结合纵向轨迹跟踪律则可以得到相应的再入制导指令。
有益效果
1、本发明公开的终端时间约束下的高超声速飞行器再入制导方法,将终端时间约束纳入横侧向制导任务中,设计了简单的U形方向角偏差走廊,通过调节走廊的边界宽度系数满足终端时间约束,在不影响高度、速度等纵向状态跟踪精度的情况下,实现了再入终端时间的有效控制,可解决协同攻击任务中的终端时间约束问题,且方法易于实现,具有较好的工程应用前景。
2、本发明公开的终端时间约束下的高超声速飞行器再入制导方法,在对终端时间进行预测时,采用含有补偿的攻角与倾侧角控制剖面,提高了飞行轨迹与终端时间预测的准确性,进而提高了终端时间的控制精度。
附图说明
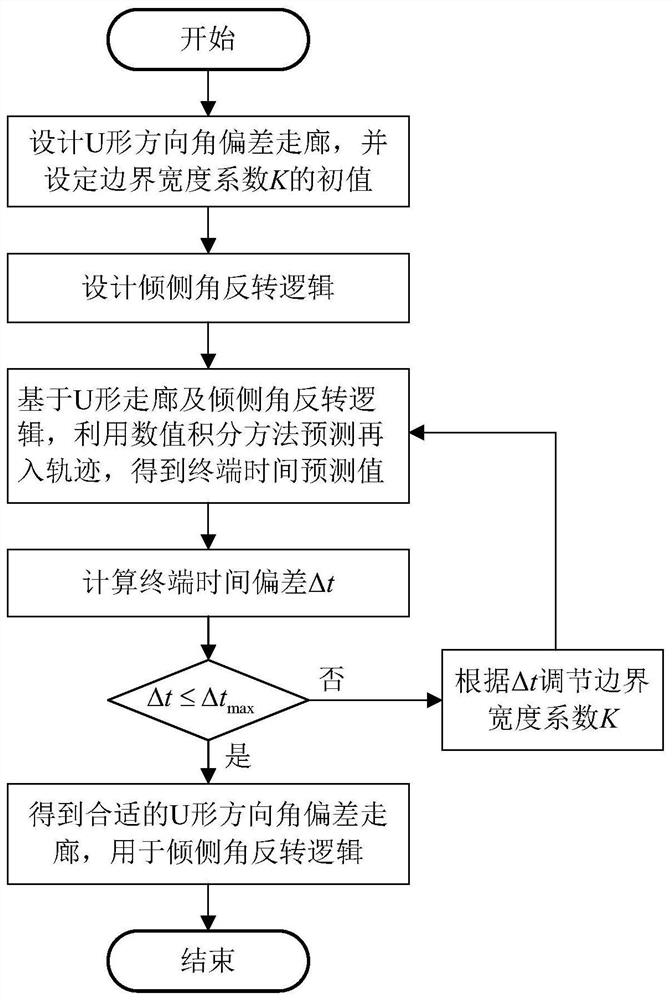
图1为本发明公开的终端时间约束下的高超声速飞行器再入制导方法步骤流程图;
图2为边界宽度系数K=6对应的U形方向角偏差走廊;
图3为终端时间约束下的再入轨迹地面投影曲线;
图4为终端时间约束下的方向角偏差曲线及U形走廊;
图5为终端时间约束下的倾侧角曲线。
具体实施方式
为了更好的说明本发明的目的和优点,下面结合一个实施例和相应附图对发明内容做进一步说明。
为了验证方法的可行性,以CAV-H飞行器的再入任务为例,进行终端时间约束下的再入制导方法仿真。飞行器的初始高度为h
如图1所示,本实施例公开的终端时间约束下的高超声速飞行器再入制导方法,具体实现步骤如下:
步骤一、针对终端方向角约束与终端时间约束,设计参数化的U形方向角偏差走廊,基于飞行器倾侧角与U形走廊边界的关系,建立高超声速飞行器倾侧角的反转逻辑。
首先,定义方向角偏差为飞行器航向角ψ与目标视线角ψ
在球面上,飞行器到目标视线角的计算公式为
而后,采用分数阶函数,设计随飞行器速度v减小而减小的U形方向角偏差走廊C(v)如下
C(v)=C
其中,K为边界宽度系数,v
C
其中,系数在0到1之间取值。
取K=6、η=0.8,得到的U形走廊如图2所示。
基于所设计的方向角偏差走廊,得到飞行器倾侧角σ的反转逻辑如下
其中,σ
步骤二、再入飞行过程中,结合高超声速再入飞行器动力学方程、控制剖面补偿方法、以及步骤一中设计的U形方向角偏差走廊,利用四阶Adams数值积分方法对飞行轨迹及飞行时间进行预测,当飞行器进入终端区域时积分终止,并得到终端时间预测值。
积分时采用考虑地球自转的高超声速再入飞行器动力学方程
其中,r为地心到飞行器质心的距离,γ为弹道倾角,L为升力加速度,D为阻力加速度,g为重力加速度;F
为消除横侧向机动对高度、速度等纵向状态量的影响,轨迹积分时采用的倾侧角和攻角曲线需进行补偿修正,即在标称值的基础上叠加补偿值
其中,α为攻角;α
其中,K
s
其中,地球半径R
结合式(18)的动力学方程及式(20-21)的控制剖面,利用四阶Adams积分方法完成再入飞行轨迹的数值积分。积分过程以飞行器进入终端区域为终止条件,当飞行器到目标点的待飞航程s
步骤三、计算步骤二得到的终端时间预测值与终端时间期望值之差,若时间差在允许范围之内,U形方向角偏差走廊给出终端时间约束下的倾侧角反转指令;否则,根据时间差在线调整走廊的边界宽度系数K,使得时间差能够控制在允许范围之内,再由新的U形方向角偏差走廊给出倾侧角反转指令。
计算终端时间的预测值t
|Δt|≤Δt
若上述条件满足,则直接由式(17)给出倾侧角反转指令。由于不满足,需对U形走廊的边界宽度系数K进行调整。
令最初的边界宽度系数为K
其中,δ取值为0.5。
得到K
利用式(25)给出的迭代方法可以得到满足式(23)的边界宽度系数,最终由式(17)给出倾侧角反转指令,再结合纵向轨迹跟踪律则可以得到相应的再入制导指令。
在该制导方法下,再入飞行轨迹的地面投影曲线如图3所示,到达目标点时的时间为1599.8s,时间误差为-0.2s,满足协同攻击任务的终端时间约束要求。飞行过程中的方向角偏差及U形走廊边界如图4所示,可以看出,方向角偏差很好的控制在走廊上下边界之内。飞行器的倾侧角曲线如图5所示,全称共进行了4次反转。以上结果表明,所设计的U形走廊及其调整方法能够有效控制再入终端时间,故所形成的再入制导方法可用于高超声速飞行器的协同攻击任务。
以上所述的具体描述,对发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 终端时间约束下的高超声速飞行器再入制导方法
- 复杂环境及任务约束下的高超声速飞行器再入制导方法