一种自动紧急制动自适应控制系统及其控制方法
文献发布时间:2023-06-19 11:27:38
技术领域
本发明属于汽车安全控制领域,具体涉及一种自动紧急制动自适应控制系统及其控制方法。
背景技术
根据交通部公路科学研究院统计,近五年共发生死亡10人以上的重特大交通事41起其中追尾事故占到 14.3%,加上驾驶员疲劳驾驶、酒驾、毒驾引起的事故占到总数23.8%,而自动紧急制动系统,就是未来防止由于驾驶员疲劳驾驶等状态下引起的追尾事故而开发的系统。
欧盟从 2013 年 11 月 1 日起对新注册的 N2、N3、M2、M3类商用车辆(专项作业车和有站立位的客车等特殊车辆除外)已经强制要求安装自动紧急制动系统(AEBS),我们国家的商用车辆保有量已经位居世界第一,而近五年死亡 10 人以上的重特大交通事故也都是由商用车辆引发,商用车辆配置主动安全有很强的必要性。
JT/T1084-2016《营运客车技术安全条件》规定:2018年5月1日起对新生产的车长大于9米的营运客车强制安装自动紧急制动系统(AEBS)。JT/T1178.1-2018《营运货车安全技术条件 第一部分:载货汽车》规定:2021年6月1日起对新生产的总质量大于等于12吨,且最高车速超过90km/h的载货车强制安装自动紧急制动系统(AEBS)。JT/T1285-2020《危险货物道路运输营运车辆安全技术条件》规定:2021年5月1日起对新生产的总质量大于或等于12吨的危化品车强制安装自动紧急制动系统(AEBS)。
当前AEBS系统按 JT/T1242-2019《营运车辆自动紧急系统》、GB/T 38186-2019《商用车辆自动紧急制动系统(AEBS)性能要求及试验方法》两个标准进行功能的测试验收。AEBS系统行业主流方案由前向毫米波雷达感知单元和前向视觉感知融合决策单组成,通过雷达探测目标数据和视觉探测目标数据进行融合来提高目标探测精度和准确度。两个系统标准中的功能验收测试都是在较好的天气条件下进行的,且并未对恶劣天气下AEBS系统制动性能作出规定。虽然GB/T 38186-2019中4.2.7规定了AEBS因恶劣天气无法工作时,应向驾驶员提供声光报警,但未规定AEBS功能如何识别恶劣天气。
雨雪天气造成道路附着系数降低,特别是雪天制动距离加长,且无法频繁制动,如采用单一的AEBS控制策略及标定数据无法实现制动性能最优,且有可能产生相反的结果。
发明内容
本发明的目的是针对现有技术存在的上述问题,提供一种基于视觉天气识别的自动紧急制动自适应控制系统及其控制方法。
为实现以上目的,本发明的技术方案如下:
一种自动紧急制动自适应控制系统,包括控制器、视觉传感器、T-BOX、车载传感器,所述控制器的内部设置有深度学习模块、物理数据预测模块、天气识别模块、AEBS控制单元,所述视觉传感器的信号输出端与深度学习模块的信号输入端连接,所述T-BOX、车载传感器的信号输出端与物理数据预测模块的信号输入端连接,所述深度学习模块、物理数据预测模块的信号输出端均与天气识别模块的信号输入端连接,所述天气识别模块的信号输出端与AEBS控制单元的信号输入端连接;
所述深度学习模块用于根据视觉传感器采集的当前道路环境图像、基于深度学习预测当前天气为雨、雪、雾的分布概率;
所述物理数据预测模块用于根据来自T-BOX的天气数据以及车载传感器的数据预测当前天气为雨、雪、雾的分布概率;
所述天气识别模块用于根据深度学习模块以及物理数据预测模块预测的天气概率确定最终当前天气为雨、雪、雾的分布概率,并将概率最大的天气类型发送给AEBS控制单元;
所述AEBS控制单元用于选择与接收到的天气类型相对应的控制策略进行制动控制。
所述车载传感器包括环境温度传感器、气压传感器、光线雨量传感器。
所述车载传感器包括环境温度传感器、气压传感器、雨刮档位传感器。
所述视觉传感器为前视摄像头。
一种自动紧急制动自适应控制系统的控制方法,依次包括以下步骤:
步骤一、深度学习模块根据视觉传感器采集的当前道路环境图像、基于深度学习预测当前天气为雨、雪、雾的分布概率并将其发送给天气识别模块,且物理数据预测模块根据来自T-BOX的天气数据以及车载传感器的数据预测当前天气为雨、雪、雾的分布概率并将其发送给天气识别模块;
步骤二、天气识别模块先根据深度学习模块以及物理数据预测模块预测的天气概率确定最终当前天气为雨、雪、雾的分布概率,然后将概率最大的天气类型发送给AEBS控制单元;
步骤三、AEBS控制单元选择与接收到的天气类型相对应的控制策略进行制动控制。
所述步骤三中,雨天的控制策略为:增加预制动的频次;
雾天的控制策略为:降低AEB启动车速,增加预制动频次,提供预警阶段的TTC时间;
雪天的控制策略为:增加预制动的频次,降低减速度控制斜率,使最大减速度执行更平缓。
步骤二中,所述天气识别模块采用以下公式确定最终当前天气为雨、雪、雾的分布概率
U=
上式中,
所述
与现有技术相比,本发明的有益效果为:
本发明一种自动紧急制动自适应控制系统包括控制器、视觉传感器、T-BOX、车载传感器,控制器的内部设置有深度学习模块、物理数据预测模块、天气识别模块、AEBS控制单元,系统运行时,深度学习模块根据视觉传感器采集的当前道路环境图像、基于深度学习预测当前天气为雨、雪、雾的分布概率并将其发送给天气识别模块,且物理数据预测模块根据来自T-BOX的天气数据以及车载传感器的数据预测当前天气为雨、雪、雾的分布概率并将其发送给天气识别模块,天气识别模块再根据深度学习模块以及物理数据预测模块预测的天气概率确定最终当前天气为雨、雪、雾的分布概率,然后将概率最大的天气类型发送给AEBS控制单元,最后AEBS控制单元选择与接收到的天气类型相对应的控制策略进行制动控制,该设计不仅实现了不同天气下制动控制策略的自适应,而且将采用基于视觉的深度学习模块与基于车载传感器和T-BOX数据的物理数据预测模块结合进行当前天气类型的预测,使预测的准确率得到显著提升,从而提高了车辆的安全性。因此,本发明不仅实现了不同天气下制动控制策略的自适应,而且有效提升了天气类型预测的准确率。
附图说明
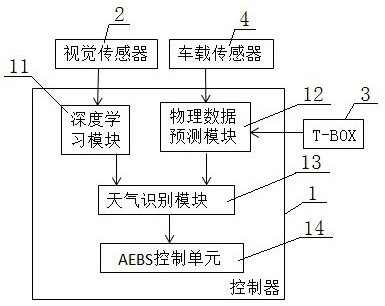
图1为本发明的结构原理图。
具体实施方式
下面结合附图说明和具体实施方式对本发明作进一步详细的说明。
参见图1,一种自动紧急制动自适应控制系统,包括控制器1、视觉传感器2、T-BOX3、车载传感器4,所述控制器1的内部设置有深度学习模块11、物理数据预测模块12、天气识别模块13、AEBS控制单元14,所述视觉传感器2的信号输出端与深度学习模块11的信号输入端连接,所述T-BOX3、车载传感器4的信号输出端与物理数据预测模块12的信号输入端连接,所述深度学习模块11、物理数据预测模块12的信号输出端均与天气识别模块13的信号输入端连接,所述天气识别模块13的信号输出端与AEBS控制单元14的信号输入端连接;
所述深度学习模块11用于根据视觉传感器2采集的当前道路环境图像、基于深度学习预测当前天气为雨、雪、雾的分布概率;
所述物理数据预测模块12用于根据来自T-BOX3的天气数据以及车载传感器4的数据预测当前天气为雨、雪、雾的分布概率;
所述天气识别模块13用于根据深度学习模块11以及物理数据预测模块12预测的天气概率确定最终当前天气为雨、雪、雾的分布概率,并将概率最大的天气类型发送给AEBS控制单元14;
所述AEBS控制单元14用于选择与接收到的天气类型相对应的控制策略进行制动控制。
所述车载传感器4包括环境温度传感器、气压传感器、光线雨量传感器。
所述车载传感器4包括环境温度传感器、气压传感器、雨刮档位传感器。
所述视觉传感器2为前视摄像头。
一种自动紧急制动自适应控制系统的控制方法,依次包括以下步骤:
步骤一、深度学习模块11根据视觉传感器2采集的当前道路环境图像、基于深度学习预测当前天气为雨、雪、雾的分布概率并将其发送给天气识别模块13,且物理数据预测模块12根据来自T-BOX3的天气数据以及车载传感器4的数据预测当前天气为雨、雪、雾的分布概率并将其发送给天气识别模块13;
步骤二、天气识别模块13先根据深度学习模块11以及物理数据预测模块12预测的天气概率确定最终当前天气为雨、雪、雾的分布概率,然后将概率最大的天气类型发送给AEBS控制单元14;
步骤三、AEBS控制单元14选择与接收到的天气类型相对应的控制策略进行制动控制。
所述步骤三中,雨天的控制策略为:增加预制动的频次;
雾天的控制策略为:降低AEB启动车速,增加预制动频次,提供预警阶段的TTC时间;
雪天的控制策略为:增加预制动的频次,降低减速度控制斜率,使最大减速度执行更平缓。
步骤二中,所述天气识别模块13采用以下公式确定最终当前天气为雨、雪、雾的分布概率
U=
上式中,
所述
本发明的原理说明如下:
本发明提供了一种自动紧急制动自适应控制系统及其控制方法,该系统采用两个模块进行天气识别,一个是深度学习模块12,主要通过摄像头拍摄当前道路环境的照片,通过基于深度学习的网络来预测天气情况,该模块目前在识别上还存在一定的误差,其天气类别准确概率仅为60%-70%,另外一个是基于车载传感器和T-BOX数据的物理数据预测模块13,采用该模块对深度学习模块12进行补充和修正,可将天气类别准确概率提升至85%左右。
实施例1:
参见图1,一种自动紧急制动自适应控制系统,包括控制器1、视觉传感器2、T-BOX3、车载传感器4,所述控制器1的内部设置有深度学习模块11、物理数据预测模块12、天气识别模块13、AEBS控制单元14,所述视觉传感器2的信号输出端与深度学习模块11的信号输入端连接,所述T-BOX3、车载传感器4的信号输出端与物理数据预测模块12的信号输入端连接,所述深度学习模块11、物理数据预测模块12的信号输出端均与天气识别模块13的信号输入端连接,所述天气识别模块13的信号输出端与AEBS控制单元14的信号输入端连接,且所述视觉传感器2为前视摄像头,所述车载传感器4包括环境温度传感器、气压传感器、雨刮档位传感器。
上述自动紧急制动自适应控制系统的控制方法,依次按照以下步骤进行:
1、深度学习模块11根据视觉传感器2采集的当前道路环境图像、基于深度学习预测当前天气为雨、雪、雾的分布概率并将其发送给天气识别模块13,且物理数据预测模块12根据来自T-BOX3的天气数据以及车载传感器4的数据预测当前天气为雨、雪、雾的分布概率并将其发送给天气识别模块13;
2、天气识别模块13先采用以下公式确定最终当前天气为雨、雪、雾的分布概率,然后将概率最大的天气类型发送给AEBS控制单元14:
U=
上式中,
3、AEBS控制单元14选择与接收到的天气类型相对应的控制策略进行制动控制,其中,
雨天的控制策略为:增加预制动的频次;
雾天的控制策略为:降低AEB启动车速,增加预制动频次,提供预警阶段的TTC时间;
雪天的控制策略为:增加预制动的频次,降低减速度控制斜率,使最大减速度执行更平缓。
- 一种自动紧急制动自适应控制系统及其控制方法
- 一种自动紧急制动系统自适应多级制动控制方法