内窥镜及使用方法
文献发布时间:2023-06-19 11:27:38
本申请要求2018年6月28日提交的美国申请号16/022,521的权益,该申请通过引用并入本文。
背景技术
用于子宫切除术的本发明的内窥镜系统通常包括具有图像显示器的基座,具有图像传感器的一次性内窥镜部件,连接至基座中的图像处理器的可重复使用的手柄部件,以及与基座和手柄部件集成的流体管理系统。内窥镜部件和可重复使用的手柄通常称为宫腔镜。
本发明特别关注的是,宫腔镜和其他内窥镜提供通过镜筒的轴杆中的工作通道的介入工具的引入。宫腔镜的工作通道的大小受到需要引入轴杆的至少远侧部分通过患者子宫颈的限制。
本发明进一步关注的是,宫腔镜可以具有相对于手柄可旋转的轴杆,并且该轴杆通常携带需要通过手柄外部连接的照相机和光源。
本发明还进一步关注的是,可旋转宫腔镜轴杆还可以通过内腔携带流体,该内腔具有固定在手柄中的外部端口。
由于这些原因,期望提供改进的宫腔镜,该宫腔镜能够通过具有相对较小轮廓的轴杆来容纳相对较大的工具的引入。进一步期望提供一种改进的宫腔镜,该宫腔镜能够容纳照相机、光源等通过固定手柄连接在可旋转轴杆上。还进一步期望提供改进的宫腔镜,该宫腔镜可以容纳通过耦合到固定手柄的可旋转轴杆的流体流动。这些目的中的至少一些将通过下文描述的发明来实现。
发明内容
在本发明的第一方面,一种宫腔镜或其他内窥镜系统包括轴杆,该轴杆具有轴杆外径、远侧轴杆部分、近侧轴杆部分以及其间的纵轴。手柄耦合到轴杆的近侧部分,并且具有对角线尺寸的图像传感器携带在轴杆的远侧部分上。通道至少延伸穿过远侧轴杆部分并具有通道直径。通道在轴杆的远侧部分中的一部分可在收缩形状或几何形状与非收缩形状或几何形状之间重新配置,以容纳通过其中引入的工具。由于通道的远侧部分的可重新配置的性质,组合的对角线尺寸和通道直径可以大于轴杆外径。手柄通常将可拆卸地耦合到轴杆,使得手柄可重复使用并且轴杆是一次性的,但是本发明的至少一些方面也将在包括固定的手柄-轴杆结构的内窥镜中找到。
在本发明的内窥镜的某些示例性实施方式中,对角线尺寸将为轴杆外径的至少50%,通常至少为60%,或更大。在进一步示例性实施方式中,通道直径也将是轴杆外径的至少50%,更经常地是轴杆外径的至少60%,或更大。
在其他示例性实施方式中,将在进一步包括流体流入源的系统中提供本发明的内窥镜,该流体流入源用于提供通过轴杆中的流入通道到轴杆的远侧部分中的出口的流体流动。通常,这样的系统将进一步包括负压源,该负压源用于提供通过轴杆中的流出通道和远侧轴杆部分中的开口的流体流出。更进一步地,该系统可以包括用于控制通过流入通道和流出通道的流体流动的控制器,以及用于调节流体流入和流出的手柄中的至少一个致动器。例如,控制器可以配置有用于操作流体流入源和负压源的算法,以将流体维持在诸如子宫腔的工作空间内的设定压力范围内。
在本发明的第二方面,一种宫腔镜或其他内窥镜包括手柄,所述手柄具有内部、轴线和固定到所述手柄的电连接器。轴杆可移除地或以其他方式耦合到手柄上,并配置成绕纵向轴线相对于手柄旋转约180°或更大的弧度,通常可逆地旋转。电子图像传感器携带在轴杆的远端,且一个或多个电引线从图像传感器延伸到手柄中的电连接器。一个或多个电导线是柔性的,并且在手柄内部配置有“松弛”部分,以适应轴杆的旋转。“松弛”是指电引线的长度大于电连接器与电引线到轴杆的附接点之间的距离,使得轴杆可以旋转而不会过度拉紧电引线。
在该内窥镜的其他示例性实施方式中,松弛部分可以形成为线圈、螺旋、折叠结构、蛇形结构等中的任何一个。在特定实施方式中,松弛部分的一端将耦合到旋转轴组件的轴线并绕旋转轴组件的轴线延伸,松弛部分的一端通常携带在固定至轴杆组件的卷轴上。卷轴通常与轴杆的轴线同心或同轴对齐,以便随着轴杆的旋转,卷轴可以根据需要容纳或放出柔性电引线。在特定实施例中,电引线可以包括柔性电路。
在这些内窥镜的又一示例性实施方式中,发光器可以携带在轴杆的远端处,并且(一个或多个)第二电引线可以从发光器延伸到固定在手柄中的第二电连接器。第二电引线配置有第二松弛部分以适应轴杆的旋转。第二轴杆部分也可以携带在第二卷轴上并且可以包括柔性电路。
在该内窥镜的又一方面中,通道可以形成在轴杆中,其中通道的一部分可在收缩形状与非收缩形状之间重新配置,以适应工具通过通道的引入。与上述第一内窥镜实施方式一样,组合的对角线尺寸和通道直径通常将大于轴杆外径。上文关于较早实施方式描述的可重新配置通道的其他特定方面也可以在本文第二方面的内窥镜中找到。
在本发明的第三方面,内窥镜包括手柄和细长轴杆。细长轴杆安装成通常可逆地绕手柄的纵向轴线旋转至少180°。电子图像传感器携带在轴杆的远端附近,并且电引线从图像传感器延伸到手柄。电引线被配置成当轴杆绕纵向轴线沿相反方向旋转时在轴杆上盘绕和解开(卷绕和解绕)。在该第三内窥镜结构的特定实施方式中,电引线可以包括柔性电路,并且柔性电路的至少一部分可以具有小于轴杆组件的横截面面积的5%的横截面面积。
在本发明的第四方面,内窥镜包括细长轴杆中的手柄,该细长轴杆安装成绕所述手柄的纵向轴线旋转至少180°。流动通道延伸通过轴杆组件到轴杆的远端中的端口。流动通道具有固定在手柄中的近侧通道部分和与轴杆一起旋转的远侧通道部分。在近侧通道部分和远侧通道部分之间的流体密封壳体被配置成在轴杆的整个旋转范围内提供通过通道部分的流体密封路径。
在本发明的第四内窥镜的特定方面,旋转轴杆可以包括在壳体中旋转的环形流动通道。内窥镜还包括延伸通过手柄和轴杆组件的第二流动通道,其中第二流动通道具有固定在手柄部件中的近侧通道部分和随着流动通道在壳体中旋转而在轴杆中旋转的远侧通道部分。
附图说明
本发明的附加方面从说明性实施方式的以下描述和从所附附图中将变得清楚明了,在所附附图中:
图1图示了对应于本发明的宫腔镜治疗系统的部件,包括内窥镜观察系统的透视图和流体管理系统的示意图。
图2是图1的内窥镜观察系统的透视图,示出了与可重复使用的手柄部件分离的一次性使用的内窥镜部件。
图3A是图2的一次性内窥镜部件的透视图,其中手柄外壳被部分地移除以示出该部件的内部。
图3B是图3A的内窥镜部件的透视图,其中流动通道壳体被移除以示出旋转轴杆组件的特征。
图4是以不同角度的图1的内窥镜观察系统的透视图,图示了旋转轴杆组件的旋转。
图5是图3A至图3B的内窥镜部件的另一透视截面图,其中流动通道壳体被移除以示出轴杆组件绕其旋转的工作通道的中心轴线和内窥镜轴杆的外套管的偏心纵向轴线。
图6是图1和图2的内窥镜观察系统的放大透视图,示出了可重复使用的手柄部件中的手指致动的控制面板以及部件的无菌和非无菌区。
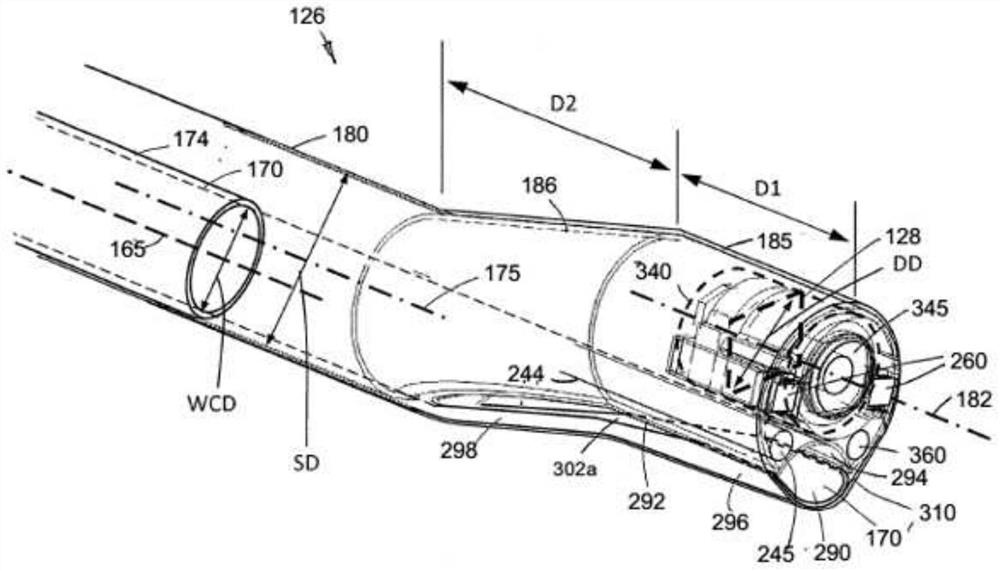
图7A是内窥镜轴杆的远端的放大透视图,示出了工作通道,该工作通道具有处于减小的横截面配置来引入到患者体内的远侧通道部分。
图7B是图7A的内窥镜轴杆的远端的另一视图,示出了当工具通过工作通道引入时处于放大的横截面配置的远侧工作通道部分。
图8是图7A至图7B的内窥镜轴杆组件的远端的另一视图,示出了从外套管末端的远侧表面向远侧延伸的图像传感器壳体。
具体实施方式
图1图示了对应于本发明的宫腔镜治疗系统50,其包括多个部件,该多个部件包括容纳在基本单元或控制台108中的内窥镜观察系统100和流体管理系统105。基本单元108还携带控制器110A和用于操作系统50的电源,并且可以包括用于处理来自由内窥镜观察系统携带的图像传感器的信号的图像处理器110B。显示器112可以耦合到基本单元108,以观察由内窥镜观察系统100提供的图像。
更具体地,图1和图2的内窥镜观察系统100包括具有手指致动的控制垫122的可重复使用的手柄部件120,和具有细长内窥镜轴杆126的一次性使用的内窥镜部件125,该细长内窥镜轴杆126携带远侧电子成像传感器128(参见图1和图7A)。流体管理系统105包括第一蠕动流入泵140A和第二蠕动流出泵140B,流体源142和流体收集容器144,流体收集容器144可以包括如本领域中已知的流体不足测量子系统。系统和子系统中的每一个将在下文更详细地描述。
参考图1、图2和图3B,可以看到内窥镜观察系统100包括手柄部件120和可拆卸一次性内窥镜部件125。在图2中,一次性内窥镜部件125可以被看作是近侧手柄壳体145的组件,该近侧手柄壳体145携带被配置用于旋转手柄壳体145的旋转轴杆组件150。
参考图1、图3B和图5,旋转轴杆组件150包括耦合到模制的旋转芯155的近侧圆柱形把手152,该模制的旋转芯155又耦合到延伸到内窥镜部件125的远端工作端162的细长外套筒160(图1)。旋转轴杆组件150绕旋转轴线165旋转。工作通道170从近侧端口172绕轴线165延伸穿过旋转轴杆组件150(参见图2和图6)。携带工作通道170的工作通道套筒174可以在图3A、图3B和图5中看到。因此,轴杆组件150绕工作通道170的中心纵向轴线165旋转。如在图5和图7A中所看到,外套筒160具有中心纵向轴线175,该中心纵向轴线175与轴杆组件150围绕其旋转的纵向轴线165偏移。图4示出了握持件152具有与偏移的远侧末端部分185对准的视觉标记178,以允许操作者通过观察把手152来知晓图像传感器128的取向。
在图1、图4、图6和图7A,可以看到内窥镜轴杆126,更特别地,外套筒160在笔直的近侧套筒部分180中延伸到偏置的远侧末端部分185,该远侧末端部分185的轴线182也为从外套筒160的中心轴线175偏移2mm到10mm(图7A)。外套筒160具有过渡部分186,该过渡部分186在笔直的近侧套筒部分180与偏移的远侧末端部分185之间在5mm至20mm的长度上以10°至45°之间的角度延伸。成像传感器128安设在偏移的末端部分185的远端处(参见图7A)。如在图5和图7B中可以看到的,内窥镜部件125并且更特别地工作通道170适于接收可以通过工作通道170引入的细长工具188。在一种变型中,在笔直、过渡和远侧末端部分(分别为180、186和185)中的每一个的细长外套筒160的直径在4mm至10mm之间,其总长度被配置用于宫腔镜检查。更通常地,内窥镜轴杆126的直径为5mm至6mm。已经发现,具有成角度的过渡部分186和偏移的远侧末端部分185的内窥镜轴杆126可以通过患者的子宫颈管引入,而无需扩张超过笔直的近侧套筒部分180的轮廓或直径SD所需的扩张。换而言之,当轴杆被推进通过子宫颈管时,围绕患者的子宫颈管的组织与内窥镜轴杆126中的角度一致。
在一种变型中,内窥镜部件125的手柄壳体145适于与手柄部件120滑动可拆卸地接合,如在图2和图4中可以最佳地看到的。很容易理解,操作者在组装时可以用一只手握住手枪式握持手柄部件120,并用另一只手的手指旋转圆柱形旋转握持件152,以将内窥镜轴杆和图像传感器128旋转到将图像传感器128和工具188的视角取向到任何期望的旋转角度。如下所述,旋转轴杆组件150可以旋转至少180°,并且更经常地旋转至少270°(图3B和图5)。在一个变型中,轴杆组件150可以旋转360°,以相对于手柄壳体145在任何上、侧或下方向上取向图像传感器128。
如在图2中可以看到的,手柄壳体145携带突出的电连接器190A,该突出的电连接器190A适于耦合至手柄部件120中的配合电连接器190B。尽管图2图示了内窥镜部件125被配置成与手柄部件120轴向滑动接合,但是应当理解,手柄部件120的成角度的手枪式握持部分192能够以不同的布置插入到内窥镜部件125中,诸如与成角度的握持部分192的轴线194对准的公-母插头连接器或螺纹连接器。如下所述,内窥镜部件125包括用于无菌领域的无菌装置,而手柄部件120可以不是无菌的,并通常适用于非无菌领域。线缆195从手柄部件120延伸到基本单元108,成像处理器110B和包括电源的控制器110A(见图1)。
如在图1和图2中可以看到的,内窥镜部件125包括与流体管理系统105连通的流体流入管200A和流体流出管200B,流体管理系统105在图1中示意性地示出。从图2、图3A和图3B可以理解,内窥镜手柄壳体145可以由两个注射模制的塑料壳元件204a和204b(参见图4)组成,而图3A示出了移除一个壳元件204a以示出手柄壳体145的内部。可以看到,流入管200A和流出管200B两者耦合到具有内部孔208的注射成型流动通道壳体205,该内部孔208被配置成接收旋转轴杆组件150的旋转芯155。
图3B是类似于图3A的另一视图,其中移除了第二壳体元件204b并且还移除了流体通道壳体205(透视图)以图示静止流入管200A和流出管200B如何与旋转至少180°的旋转轴杆组件150中的流入和流出路径连通。
参考图3A和图3B,可以看到,旋转芯155与工作通道170的轴线165中心对准,并且进一步耦合到内窥镜轴杆126的偏心的细长外套筒160。旋转芯155的近端212固定到握持件152,用于使旋转芯155在流体通道壳体205中旋转。
旋转芯155包括在其间限定了环形流动通道220和222的第一凸缘218a、第二凸缘218b和第三凸缘218c。可以看到,环形通道220安设在第一凸缘218a与第二凸缘218b之间。环形通道222安设在第二凸缘218b与第三凸缘218c之间。第一凸缘218a、第二凸缘218b和第三凸缘218c中的每一个均携带外O形环224a、224b和224c。从图3A和图3B的视图中,可以理解,旋转凸缘218a-218c在流动通道壳体205的孔208中旋转,并且O形环224a-224c在环形流动通道220和222之间维持流体密封。
再次参考图3A和图3B,可以看到流入管200A的远端230a固定在流动通道壳体205中以与环形流动通道222连通。类似地,流出管200B的远端230b固定在流动通道壳体中以与环形流动通道205连通。因此,环形流动通道222和220中的每一个可以旋转多达360°并与流入管200A和流出管200B的固定远端连通。
图3B进一步示出了环形流动通道222和220如何与延伸穿过细长套筒160的内部到内窥镜轴杆126的工作端162的单独流动通道连通。在图3B中可以看到流体流入路径,其在第二环形通道222内延伸穿过围绕旋转芯155的内套筒部分235的外部的环形间隙AG。这样的环形间隙AG向远侧延伸以与外套筒160的内部孔242连通。在一个变型中,所述内部孔242内的路径过渡到具有远侧出口245的流入套筒244,如图7A至图7B所示。
流体流出路径也可以在图3B中看到,其中在旋转芯155的环形空间220的内表面中设置有开口250,该开口与内部工作通道170连通。因此,在一个变型中,来自工作空间的流出路径包括工作通道170,当工作通道中没有工具188时,工作通道170完全打开用于流体流出。在图5中,可以看到在工作通道170的近侧区域中示出了工具密封件252,该工具密封件252密封通道170并且还允许工具188从其中引入。在本领域中已知许多类型的密封件,诸如硅树脂套筒密封件、瓣阀密封件等。通常,当通过工作通道170引入工具时,工具本身将提供流出通道。因此,当使用在工作通道中没有工具的内窥镜时,将工作通道170用作流出通道适于诊断程序。
在使用方法中,可以操纵内窥镜轴杆126通过患者端宫颈管,其中操作流入泵140A和流出泵140B(参见图1)来通过内窥镜部件125的远侧末端部分185提供连续冲洗,同时通过图像传感器128进行内窥镜观察。因此,这样的变型将允许流体流入通过环形通道222,并且流体流出通过工作通道170和环形通道220。
现在转到图7A至图7B,内窥镜轴杆126具有小的插入轮廓或配置,该插入轮廓或配置由细长外套筒160的外径组成,该外套筒160包括近侧笔直部分180,成角度的过渡部分186和远侧末端部分185(图7A)。在图7A中可以看到,远侧末端部分185携带有图像传感器128和两个LED 260,这两个LED 260需要电连接到基本单元108、控制器110A和成像处理器110B。为了提供图像传感器128所需的大量电引线,发现常规的多线电线缆太大而不能被小直径的外套筒160容纳,该小直径的外套筒160也容纳工作通道170、流入通道244和可能的其他流体流动通道。出于这个原因,发现平坦带265(图5)形式的印刷柔性电路可以提供10条至40条电引线,并且仅在内窥镜轴杆126内占据薄的平面空间。图7A示出了柔性电路带265,其在外套筒160内从图像传感器128向近侧延伸。在图3A、图3B、图5和图7A所示的一个变型中,提供第二柔性电路带270以给LED 260供电。在另一变型中,第一柔性电路带265可以潜在地将电引线携带到图像传感器128和两个LED 260。
现在转到图3A、图3B和图5,图示了在电路或柔性电路带265和270中提供所需的松弛以适应旋转轴杆组件150相对于手柄壳体145(图3A)的旋转的机构。在图3B和图5中可以最好地看到,旋转轴杆组件150包括第一或远侧卷轴280,柔性电路带265可以围绕其缠绕或卷绕。远侧卷轴280形成为旋转轴杆组件150的旋转芯155的一部分。可以根据需要提供任何合适长度的柔性电路带265,以允许旋转轴杆组件150相对于手柄壳体145旋转至少180°或更经常地360°。在图3B和图5所示的变型,可以看到第二或近侧卷轴285包括旋转芯155的一部分,并且适于接收延伸到两个LED 260的第二柔性电路带270的松弛长度。在图3B和图5中,可以看到柔性电路带265、270的近端265’、270’通过插头连接器288a和288b耦合到电连接器190A。尽管图3A至图3B的变型示出了内窥镜手柄将柔性电路带265容纳在卷轴280中,但是应当理解,柔性电路带的松弛部分可以被配置成没有卷轴的盘绕形式、螺旋形式或折叠形式中的至少一种。
在本发明的一方面,参考图7A,提供了携带远侧图像传感器128的内窥镜轴杆126,其中轴杆126中的工作通道170的直径大于轴杆126的外径的50%,并且通往图像传感器128的电引线包括柔性电路265。在这样的变型中,柔性电路带具有小于0.4mm的厚度和小于5.0mm的宽度。更经常地,柔性电路带具有小于0.3mm的厚度和小于4.0mm的宽度。此外,在该变型中,柔性电路带携带至少10条电引线,通常多于15条电引线。在另一方面,延伸到图像传感器128的电导线处于横截面小于内窥镜轴杆126的横截面的5%的线缆或带中。在本发明的另一方面,内窥镜包括:携带远侧图像传感器的轴杆,延伸通过轴杆的工作通道,其中远侧轴部分中的工作通道可在收缩形状与非收缩形状之间重新配置,以容纳通过其中引入的工具,其中组合的传感器的对角线尺寸DD和工作通道170的直径WCD在其插入配置或轮廓上大于轴杆直径SD(参见图4、图6和图7A)。
在特定实施例中,图像传感器128可以从加利福尼亚州圣克拉拉市Burton Drive第4275号OmniVision公司,邮编95054购买,零件名称/编号为:1280x 720像素数的高清传感器OV9734。传感器128的包装尺寸为2532μm x 1722μm,对角线DD为3062μm或3mm。此外,近侧轴杆(外)直径SD为5mm,而工作通道直径WCD为3mm。因此,组合的传感器对角线DD(3mm)和工作通道直径WCD(3mm)等于6mm,大于轴杆外径5mm。在该示例中,柔性电路带的宽度为3.4mm,厚度为0.2mm,横截面面积为0.68mm
再次参考图7A至图7B,内窥镜轴杆126的远侧部分包括远侧工作通道部分170’,该远端工作通道部分170’可在如图7A所示的用于容纳流体流出的第一较小横截面与如图7B所示的用于容纳通过工作通道170及其远侧部分170’引入的工具188的第二较大横截面之间重新配置。
在如图3A-图3B、图5、图6和图7A所示的一个变型中,可以看到,限定工作通道170的工作通道套筒174以笔直的配置通过内窥镜部件125从其近测开口端口172延伸到其远侧末端290。可以在图7A和图7B中看到,套筒174的远端292具有笔直且刚性的上部表面294。工作通道套筒174具有柔性的下部或下套筒部分296,并且在一个变型中具有在套筒174中的侧壁切口302a和302b下方的活动铰链部分298。此外,内窥镜轴杆126的远端包括弹性体套筒310,该弹性体套筒310包围近侧直套筒部分180的成角度的过渡套筒部分186、远侧末端部分185以及远侧部分312(图7B)。因此,可以在图7A中看到,弹性体套筒310具有足够的弹性强度,以将工作通道部分170’塌缩或收缩到较小的横截面,如在图7A中看到的。
如在图7A中可以看到,下套筒部分296包括具有足够曲率的套筒壁315,以在弹性体套筒310收缩远侧通道部分170’时维持通过远侧工作通道部分170’的开放路径,从而始终提供开放的流体流出路径。例如,套筒壁315可以具有代表与套筒174的近侧部分相同的直径的曲率,并且在范围为30°至90°的径向角度上延伸。尽管图7A所示下套筒部296包括金属套筒174的壁的一部分,但是在另一变型中,柔性下套筒部分296可以是任何可弯曲的塑料材料或塑料和金属的组合。
接下来,图7B示出了当医师通过工作通道170插入细长工具188(透视图)时处于其第二扩张配置的远侧工作通道部分170’。这样的工具188将首先沿下套筒296的铰链部分298滑动,并继而拉伸弹性体套筒310来打开远侧工作通道部分170’,以允许工具188延伸通过工作通道。换而言之,当工具通过远侧工作通道部分170’插入时,弹性体套筒310将被拉伸或变形到张紧位置,如图7B所示。当工具188从工作通道部分170’撤回时,弹性体套筒310将从图7B的张紧位置返回到图7A的静止或非张紧位置,以将工作通道部分170’返回到图7A的收缩配置。
通常,对应于本发明的内窥镜组件125允许使用相对于内窥镜轴杆126的插入轮廓或直径具有较大对角线尺寸的图像传感器128,同时提供相对于内窥镜轴组件126的插入轮廓或直径具有较大工作通道直径WCD的工作通道170。更具体地,内窥镜组件125包括具有延伸到远侧套筒部分185的轴杆直径SD的内窥镜轴杆126,由远侧套筒部分185携带的具有对角线尺寸DD的图像传感器128,以及延伸通过细长轴杆126的具有直径WCD的工作通道170,其中轴杆126的远端中的工作通道部分170’的形状可调节以容纳穿过其中引入的工具188,并且其中组合或传感器的对角线尺寸DD和工作通道直径WCD大于轴杆直径SD(参见图7A)。
在一种变型中,传感器对角线尺寸DD大于轴杆直径SD的50%或大于轴杆直径的60%。在一种变型中,工作通道直径WCD大于轴杆直径的30%,大于轴杆直径的40%或大于轴杆直径的50%。换而言之,远端中的工作通道部分170’可在第一横截面尺寸与第二横截面尺寸之间调节。在图7A至图7B的变型中,在内窥镜轴杆126的远侧区域中的工作通道部分170’可在部分收缩形状与非收缩形状之间调节。
在一个变型中,参考图7A,内窥镜轴杆126的远侧末端部分185具有在5mm至20mm范围内的轴向尺寸D1。还参考图7A,成角度的过渡套筒部分186在5mm至20mm的范围内的相似的轴向尺寸D2上延伸。仍然参考图7A,远侧末端部分185的中心轴线182可以平行于并从笔直轴杆部分180的纵向轴线175偏移范围为1mm至10mm的距离。
现转向图8,图像传感器128携带在传感器壳体340中,传感器壳体340还携带本领域中已知的透镜组件345。在一个变型中,壳体340还携带一个或多个发光器,在图7A和图7B所示的变型中,示出了以260指示的两个LED携带在传感器壳体340的相对侧中。特别感兴趣的是,透镜组件345的最远侧表面350和LED 260如图8中所示从远侧末端部分185的远侧表面352向外向远侧安设。已经发现,提供这样的透镜组件的最远侧表面350和从远侧末端部分185的远侧表面352向外的LED改善来自LED 260的照明,并且改善图像传感器128的视野。在图7中的D3处指示的距离的范围为0.2mm到2.0mm。
现参考图7A,本发明的另一方面包括可选的专用流体压力感测通道360,其延伸通过内窥镜轴杆126中的薄壁套筒(未示出)。如在图7A中看到的,压力感测通道360的远端在内窥镜轴杆126的远端表面352中是打开的。压力感测通道360可以延伸到手柄壳体145中的一次性压力传感器(未示出)。这样的一次性压力传感器继而可以通过手柄壳体145中的电连接器190A将电引线耦合,从而向控制器110A(图1)发送指示压力的电信号。因此,在一方面,一次性内窥镜部件125携带通过可拆卸连接器耦合到遥控器110A的一次性压力传感器。
在压力感测机构的一个变型中,参考图7A,压力感测通道360的壁由可以是任何合适的聚合物,诸如PFTE,的疏水材料组成,具有在0.25mm至2.5mm范围内的内径。通道360的直径通常在0.5mm至1.5mm之间。已经发现,压力感测通道360中的疏水表面将防止流体迁移到通道中,从而在与压力传感器连通的通道中捕获气柱。由于通道直径非常小,压力感测通道360中气柱的可压缩性不会显著影响感测到的压力。在另一变型中,金属套筒可以涂覆有疏水表面或超疏水表面。
现在参考图1、图2和图4,可以看到手柄部件120具有成角度的手枪式握持部分192,该成角度的手枪握持部分192具有远离内窥镜轴杆126的轴线175成10°至90°角度的轴线194。握持部分192包括手指或拇指致动的控制垫122,该控制垫122携带致动器按钮,用于操作治疗系统的所有功能,例如,包括(i)操作流体管理系统105,(ii)从传感器128捕获图像或视频,(iii)调节来自LED 260等的光强度。如上所述,控制单元108通常携带图像处理器110B。然而,手柄部件120的内部也可以携带图像处理器110B或其处理部件。
图4以不同的角度示出了手柄部件120和内窥镜部件125,其中可以看到,握持部分192在其中具有凹入通道385,该凹入通道385适于将流入管200A和流出管200B接收并锁定在适当的位置,以便在使用过程中将管套件与手枪式握持件192整合在一起。这个特征很重要,以使流入管和流出管不会干扰内窥镜部件125或通过工作通道170引入的工具的操作。手枪式握持件192可以具有单个凹入通道385,以接受流入管和流出管两者或分别用于接收流入管和流出管的两个凹入通道。
现转到图6,组装的手柄部件120和内窥镜部件125的放大图示出了具有适于操作系统的四个致动器按钮或开关的控制垫122。在一种变型中,致动器402适于打开和关闭冲洗,或者换而言之,致动流体管理系统105以提供流体流入和流体流出。致动器404适于图像或视频捕获。在一种变型中,瞬时按压致动器404将捕获单个图像,并且致动器上的较长压力将操作视频记录。
致动器或滚动按钮406具有滚动功能,其中按压滚动按钮406将在各个子系统之间循环,其中每个子系统继而可以由中央按钮或上/下致动器410进一步调节,中央按钮或上/下致动器410适于增加、降低或以其他方式更改任何选定子系统的运行参数。在一个实施例中,可以致动滚动按钮406以在以下子系统和特征之间循环:(i)来自流体管理系统105的流体流入/流出速率;(ii)将由流体管理系统105维持的设定压力;(iii)由流体管理系统105计算的流体不足警报;(iv)静止图像捕获或视频捕获的可选选择,以及(v)LED光强度。继而,在滚动以选择子系统之后,医师可以致动中央或上/下致动器410以调节选定子系统的操作参数。如将在下面进一步描述的,子系统的选择以及每个子系统的实时操作参数将显示在如图1所示的视频监视器或显示器112上。因此,可以理解,医师可以在观察诸如在显示器112上的选择的同时操作滚动按钮406来滚动浏览并选择任何子系统或特征,并继而致动上/下致动器410以调节也可以在显示器112上观察到的操作参数。
在本发明的另一方面,控制器110A包括用于操作控制板122的控制算法,该控制算法在医师已经使用滚动按钮或致动器406之后提供跳回到默认状态。例如,默认条件将是可由中央或上/下致动器410致动的选定默认子系统。在一个变型中,默认子系统是流体流入/流出速率,其可以是医师最通常致动的子系统,以控制流体流入和流出工作空间。如上所述,医师可以使用滚动按钮406来选择用于调节操作参数的任何子系统。但是,如果医生没有继续在各个子系统之间滚动或在预定时间间隔内更改参数,则控制算法将跳回到默认子系统,该默认子系统可能是流体流入/流出速率。控制算法跳回到默认条件的预定时间间隔或超时可能是1秒到10秒之间的任何时间,更常见的是2秒到5秒之间。
仍参考图6,手柄部件120与内窥镜部件125的组件用平面P示出,以图示相对于内窥镜组件的无菌区415和非无菌区420。可以理解,一次性内窥镜部件125被消毒,医生或护士将从无菌包装中取出继而将限定出无菌区415的部件125。继而,内窥镜部件125将与限定非无菌区420的手柄部件120配合。在其他变型(未示出)中,塑料膜或其他塑料外壳可以覆盖手柄部分120。
从图6也可以理解本发明的方法。可以理解,医生必须以确保工具无菌的方式将工具188插入工作通道170中。从图6中可以看到,无菌握持件152在其中具有大直径的凹部R,该凹部R逐渐变细到工作通道170的近侧端口172中。在一种变型中,凹部R的直径至少为15mm,并且通常大于20mm。凹部的深度可以在5mm至20mm或更大的范围内。因此,可以理解,医师可以容易地将工具188的远端425插入大直径凹部R的口中,而没有接触非无菌手柄部分120的任何风险。此后,医师可以在凹口R的表面428之上向远侧移动工具,进入并通过工作通道170的端口172。通过使用该方法,医师可以确保工具188将不会接触非无菌区420。
尽管以上已经详细描述了本发明的特定实施方式,但是将理解的是,该描述仅是为了说明之目的,并且本发明的上述描述不是穷举的。本发明的特定特征在一些附图中示出,而在其他附图中未示出,这仅是为了方便起见,并且根据本发明,任何特征可以与另一特征组合。对于本领域普通技术人员而言,许多变化和替代将是显而易见的。这样的替代和变化旨在被包括在权利要求的范围内。从属权利要求中提出的特定特征可以组合并且落入本发明的范围内。本发明还包括实施方式,如同从属权利要求是以参考其他独立权利要求的多项从属权利要求格式替代地撰写的。
其他变化在本发明的精神内。因此,尽管本发明易于进行各种修改和替代构造,但是其某些图示的实施方式在附图中示出并且已经在上文进行了详细描述。然而,应当理解,无意将本发明限制为所公开的一种或多种特定形式,而是相反,意图是涵盖落入如所附权利要求所限定的本发明的精神和范围内的所有修改、替代构造和等效物。
在描述本发明的上下文中(特别是在所附权利要求的上下文中)术语“一个”、“一种”和“该”以及类似指代的使用应解释为涵盖单数形式和复数形式,除非本文另有指示或与上下文明显矛盾。除非另有指出,否则术语“包括”、“具有”、“包含”和“含有”应解释为开放式术语(即,意思是“包括但不限于”)。术语“连接”应被解释为部分或全部包含在内,附接到或结合在一起,即使有介入物。除非本文另有指示,否则本文中数值范围的列举仅旨在用作分别指代落入该范围内的每个单独值的简写方法,并且每个单独值都被并入说明书中,如同其在本文中被单独引用。除非本文另有指示或与上下文明显矛盾,否则本文描述的所有方法能够以任何合适的顺序执行。除非另外要求,否则本文提供的任何和所有示例或示例性语言(例如,“诸如”)的使用仅旨在更好地阐明本发明的实施方式,并且不对本发明的范围构成限制。说明书中的任何语言都不应解释为指示任何未要求保护的元件对于实施本发明必不可少。
本文引用的所有参考文献,包括出版物、专利申请和专利,均以引用的方式并入本文,其程度如同每个参考文献被单独且具体地指示通过引用并入并在本文中完整阐述。
- 内窥镜辅助管、内窥镜设备及内窥镜设备的使用方法
- 一种可变多通道管、可变内窥镜及可变内窥镜的使用方法