一种基于互联网农业的农作物重大灾害预警设备
文献发布时间:2023-06-19 11:29:13
技术领域
本发明属于农业监测技术领域,特别是涉及一种基于互联网农业的农作物重大灾害预警设备。
背景技术
农作物的重大灾害包括地质灾害、气象灾害和生物灾害,为预防生物灾害对农作物产生重大灾害,工作人员在喷洒相应药物的同时还应密切关注农作物生长环境中的有害生物的发展,随着科技发展,采用无人机巡视取代人工在田间查看,减轻了大量人力,同时提高了巡查效率,现有的无人机功能也较为全面,如:
现有公开文献,CN106081106A无线充电无人机,包括机身、机翼、仿生机械腿以及设于机身上的接收装置,接收装置用于接收设于地面的能量发射装置发射的能量,仿生机械腿与机身底部枢接,本发明的技术方案通过设在机身上的接收装置配合地面的能量发射装置,使无人机具备了较长的续航时间,增加了使用者的便利性和体验性。
上述无人机具有无线充电功能,增加使用者的便利性,提高了无人机使用效率,但是无人机在巡检过程中仍存在以下弊端:
1、现有的巡航无人机在巡检前后需要人工手动对巡航无人机进行收放,耗费时间精力;
2、现有的巡航无人机携带的摄像头拍摄角度固定,依靠人工操作进行改变拍摄角度,具有一定局限性;
3、现有的巡航无人机需要人工手动控制其启停,增加工作人员的劳动强度。
因此,现有的用于农业生物灾害监测的巡航无人机无法满足实际使用中的需求,所以市面上迫切需要能改进的技术,以解决上述问题。
发明内容
本发明的目的在于提供一种基于互联网农业的农作物重大灾害预警设备,通过设置活动平台、摄像机构和定时器,解决了现有农作物重大灾害预警用的无人机在作业过程中需要人工手动收纳,无人机携带的摄像头拍摄角度固定,依靠人工操作进行改变拍摄角度,具有一定局限性,人工定时操作无人机,增强劳动强度的问题。
为解决上述技术问题,本发明是通过以下技术方案实现的:
本发明为一种基于互联网农业的农作物重大灾害预警设备,包括巡检台,所述巡检台包括支架、驱动箱、机仓、太阳能电池板和活动平台,且支架内顶端中央位置固定连接有驱动箱,所述支架外顶端中央位置固定连接有机仓,且机仓上端呈倾斜设置有太阳能电池板,所述机仓内滑动连接有活动平台,且活动平台包括的底板外侧固定连接有挡板,所述底板内侧固定连接有支板,且支板内侧两端中央位置固定连接有电动推杆的输出端,所述底板上侧中部关于其中线对称设置有无线充电端头,且无线充电端头无线连接有巡航无人机四角设置的支臂,所述巡航无人机底部中央位置固定连接有摄像机构,且摄像机构包括的安装架内部通过转轴转动连接有摄像头,所述摄像头前端上部通过连接件转动连接有电动伸缩杆,所述驱动箱外部一侧中央位置固定连接有超声波接收器,且超声波接收器无线连接有控制台上部设置的超声波发生器,所述超声波发生器串联连接有定时器,且定时器设置在控制台内部。
进一步地,所述电动推杆尾部固定连接在机仓内部后侧,且机仓内部底侧两边固定连接有导轨,所述导轨外侧滑动连接与滑条,且滑条固定连接在底板下侧左右两边,电动推杆作业时,与电动推杆相对固定的支板带动活动平台整体移动,在此过程中,滑条与导轨发生相对滑动,配合活动平台的进出。
进一步地,所述安装架外部上侧固定连接在巡航无人机下部中央位置,且安装架上侧端部呈开口设置,所述安装架上侧端部贯穿有连接件,且连接件转动连接的电动伸缩杆的尾部固定连接在巡航无人机的内部,电动伸缩杆整体设置在巡航无人机内部,安装架上侧端部设置的开口用于电动伸缩杆输出端与连接件的活动。
进一步地,所述支架顶端呈封闭设置,且支架呈框架式结构设置,所述支架底端与外界固定装置配合设置,支架将巡检台整体工作高度抬高,避免周围环境对巡检台上部结构工作造成影响。
进一步地,所述驱动箱与外界电源电性连接,且驱动箱与无线充电端头电性连接,外界电源对驱动箱进行供电,防止太阳能电池板转换的电能供应不足,驱动箱通过无线充电端头实现对巡航无人机的无线充电。
进一步地,所述巡航无人机包括机身、悬臂、电动座,螺旋桨和支臂,且悬臂固定连接在机身四角,所述悬臂外端部上侧固定连接有电动座,且电动座上端转动连接有螺旋桨,巡航无人机启动时,螺旋桨高度转动,带动巡航无人机整体上升。
进一步地,所述驱动箱内部设置有电路保护模块和蓄电模块,且电路保护模块和蓄电模块与太阳能电池板呈串联设置,蓄电模块将太阳能电池板转化的电能进行存储,以供驱动箱的使用。
进一步地,所述巡航无人机内部设置有能量接收模块,且能量接收模块与无线充电端头内设置的能量发射模块无线连接,能量发射模块与能量接收模块相互配和,实现巡航无人机的无线充电。
本发明具有以下有益效果:
1、本发明通过设置活动平台,具有便于收纳保护巡航无人机的效果,解决了巡航无人机在巡检后需要人工手动收纳的繁琐过程的问题,驱动箱在控制台的作用下定时控制电动推杆作业,电动推杆伸长时,与电动推杆保持相对固定的支板带动活动平台向外移动,直至活动平台上方设置的巡航无人机完全显露,此时驱动箱按照预定程序控制巡航无人机作业,开始对农作物进行巡航检察,反之,无人机在巡检结束之后返回至活动平台处,驱动箱控制电动推杆收缩,在电动推杆的作用下,活动平台收纳至机仓内部,同时开启充电,节省了人工收纳巡航无人机耗费的时间与精力。
2、本发明通过设置摄像机构,具有多角度拍摄农作物的效果,解决了巡航无人机携带的摄像头拍摄角度固定,依靠人工操作进行改变拍摄角度,具有一定局限性的问题,电动伸缩杆输出端发生伸缩时,电动伸缩杆输出端与摄像头之间的角度发生变化,同时摄像头在电动伸缩杆施加的外力的作用下发生旋转,摄像头通过转轴与安装架发生相对旋转时,摄像头的拍摄角度同时发生变化,实现多角度拍摄监测农作物。
3、本发明通过设置定时器结构,具有定时自动控制巡检无人机工作的效果,解决了人工定时操作巡航无人机,增强劳动强度的问题,预先设定好定时器的间歇时间,当定时器达到预定时间时,超声波发生器整体电路接通,此时超声波发生器发出超声波信号,当超声波接收器接收到对应信号时,将超声波信号转化呈电路信号,并传递至驱动箱,驱动箱接受到电路信号进行进一步处理分析后控制对应元件工作,实现定时自动控制巡航无人机的启停。
当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
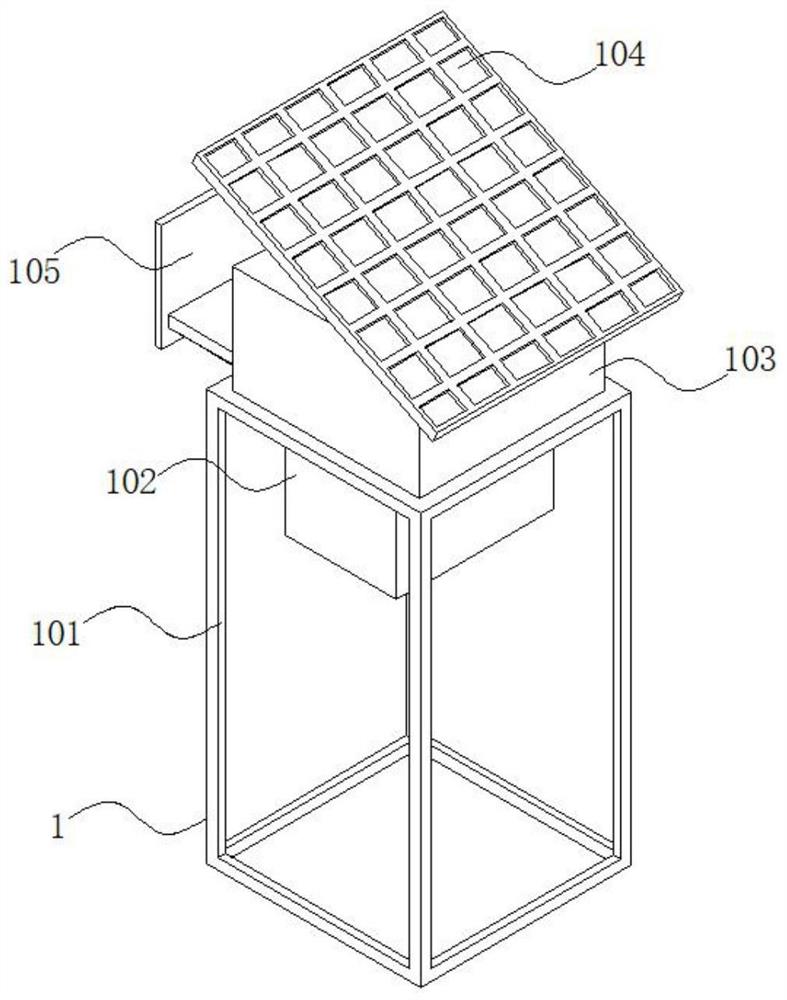
图1为本发明主体外观示意图;
图2为本发明活动平台结构示意图;
图3为本发明巡航无人机与活动平台位置关系示意图;
图4为本发明摄像机构结构示意图;
图5为本发明控制台与驱动箱工作示意图;
图6为本发明定时器结构示意图;
图7为本发明超声波发生器工作电路示意图;
图8为本发明太阳能电池板工作示意图;
图9为本发明巡航无人机无线充电示意图。
附图中,各标号所代表的部件列表如下:
1、巡检台;101、支架;102、驱动箱;103、机仓;104、太阳能电池板;105、活动平台;1051、底板;1052、挡板;1053、支板;1054、滑条;1055、导轨;1056、电动推杆;1057、无线充电端头;2、巡航无人机;201、机身;202、悬臂;203、电动座;204、螺旋桨;205、支臂;3、摄像机构;301、安装架;302、摄像头;303、转轴;304、连接件;305、电动伸缩杆;4、超声波接收器;5、控制台;6、超声波发生器;7、定时器;8、电路保护模块;9、蓄电模块;10、能量接收模块;11、能量发射模块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
请参阅图1-9所示,本发明为一种基于互联网农业的农作物重大灾害预警设备,包括巡检台1,巡检台1包括支架101、驱动箱102、机仓103、太阳能电池板104和活动平台105,且支架101内顶端中央位置固定连接有驱动箱102,支架101外顶端中央位置固定连接有机仓103,且机仓103上端呈倾斜设置有太阳能电池板104,机仓103内滑动连接与活动平台105,且活动平台105包括的底板1051外侧固定连接有挡板1052,底板1051内侧固定连接有支板1053,且支板1053内侧两端中央位置固定连接有电动推杆1056的输出端,驱动箱102在控制台5的作用下定时控制电动推杆1056作业,电动推杆1056伸长时,与电动推杆1056保持相对固定的支板1053带动活动平台105向外移动,直至活动平台105上方设置的巡航无人机2完全显露,此时驱动箱102按照预定程序控制巡航无人机2作业,开始对农作物进行巡航检察,底板1051上侧中部关于其中线对称设置有无线充电端头1057,且无线充电端头1057无线连接有巡航无人机2四角设置的支臂205,巡航无人机2底部中央位置固定连接有摄像机构3,且摄像机构3包括的安装架301内部通过转轴303转动连接有摄像头302,摄像头302前端上部通过连接件304转动连接有电动伸缩杆305,电动伸缩杆305输出端发生伸缩时,电动伸缩杆305输出端与摄像头302之间的角度发生变化,同时摄像头302在电动伸缩杆305施加的外力的作用下发生旋转,摄像头302通过转轴303与安装架301发生相对旋转时,摄像头302的拍摄角度同时发生变化,实现多角度拍摄监测农作物,驱动箱102外部一侧中央位置固定连接有超声波接收器4,且超声波接收器4无线连接有控制台5上部设置的超声波发生器6,超声波发生器6串联连接有定时器7,且定时器7设置在控制台5内部,预先设定好定时器7的间歇时间,当定时器7达到预定时间时,超声波发生器6整体电路接通,此时超声波发生器6发出超声波信号,当超声波接收器4接收到对应信号时,将超声波信号转化呈电路信号,并传递至驱动箱102,驱动箱102接受到电路信号进行进一步处理分析后控制对应元件工作。
其中如图1-2所示,支架101顶端呈封闭设置,且支架101呈框架式结构设置,支架101底端与外界固定装置配合设置,驱动箱102与外界电源电性连接,且驱动箱102与无线充电端头1057电性连接,电动推杆1056尾部固定连接在机仓103内部后侧,且机仓103内部底侧两边固定连接有导轨1055,导轨1055外侧滑动连接与滑条1054,且滑条1054固定连接在底板1051下侧左右两边,支架101作为巡检台1整体的支撑结构,将支架101通过外界固定装置固定位置之后,支架101位置不发生偏移,从而巡检台1整体位置固定,无线充电端头1057作为充电连接端,而驱动箱102作为动力提供着,从而驱动箱102通过无线充电端头1057对巡航无人机2进行充电,电动推杆1056作业时,滑条1054与导轨1055发生相对滑动,同时滑条1054与导轨1055相互扣合,使得滑条1054始终沿着导轨1055进行移动,从而配合底板1051的进出。
其中如图3所示,巡航无人机2包括机身201、悬臂202、电动座203,螺旋桨204和支臂205,且悬臂202固定连接在机身201四角,悬臂202外端部上侧固定连接有电动座203,且电动座203上端转动连接有螺旋桨204,巡航无人机2定期对农田进行巡视,对农田内农作物的虫害情况进行拍摄反馈,巡航无人机2在驱动箱102的作用下补充电量,同时巡航无人机2在驱动箱102的控制下外出或者收仓,机身201内设置有感应模块,且感应模块与驱动箱102内设有的驱动模块对应,巡航无人机2工作时,电动座203带动螺旋桨204转动,从而在上升气流的作用下,巡航无人机2上升飞出。
其中如图4所示,安装架301外部上侧固定连接在巡航无人机2下部中央位置,且安装架301上侧端部呈开口设置,安装架301上侧端部贯穿有连接件304,且连接件304转动连接的电动伸缩杆305的尾部固定连接在巡航无人机2的内部,安装架301上侧端部设置的开口用于连接件304的安装固定,连接件304与摄像头302相对固定,同时连接件304与电动伸缩杆305保持相对活动,电动伸缩杆305整体设置在巡航无人机2包括的机身201的内部。
其中如图8所示,驱动箱102内部设置有电路保护模块8和蓄电模块9,且电路保护模块8和蓄电模块9与太阳能电池板104呈串联设置,太阳能电池板104将太阳能转化成电能,并存储在蓄电模块9中,供驱动箱102使用,在此过程中,电路保护模块8对蓄电模块9与太阳能电池板104之间形成的循环电路进行保护,防止电路中出现过载情况。
其中如图9所示,巡航无人机2内部设置有能量接收模块10,且能量接收模块10与无线充电端头1057内设置的能量发射模块11无线连接,驱动箱102通过无线充电端头1057内的能量发射模块11将能量发射至巡航无人机2内设置的能量接收模块10内,实现对巡航无人机2的无线充电。
以上仅为本发明的优选实施例,并不限制本发明,任何对前述各实施例所记载的技术方案进行修改,对其中部分技术特征进行等同替换,所作的任何修改、等同替换、改进,均属于在本发明的保护范围。
- 一种基于互联网农业的农作物重大灾害预警设备
- 一种基于互联网农业的农作物喷药施肥无人机