一种粉煤灰库多功能清灰设备
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及一种清灰设备,尤其是涉及一种粉煤灰库多功能清灰设备。
背景技术
火力发电厂通过燃烧煤来生产电能。粉煤灰是从煤燃烧过程中产生的烟气中收集下来的固体废物,是污染较重的工业废渣。电厂将粉煤灰存储在存储罐中,对粉煤灰进行定期资源化回收。但是由于空气潮湿等各种因素影响,导致灰库中粉煤灰容易板结,粘结内壁,使得灰库容量减少。更甚至堵塞出料口导致出料不畅或无法出料。为不影响企业的系统生产,电厂需要对粉煤灰存储库定期进行清理。现在国内清库作业主要采用人工清理,效率不高,危险系数高,灰库中粘结堆积的粉煤灰时刻危机灰库工作人员生命安全。例如2014年5月20日,安阳某电厂6号干灰库发生干灰坍塌埋人事故,造成3人伤亡,直接经济损失约98.5万元。2017年12月6日,辽宁某发电厂9号机组灰库发生积灰滑坡掩埋事故,造成1人死亡。2018年5月21日,神华集团某电厂灰库发生灰区坍塌事故,造成1人死亡。除了存在这些坍塌事故等直接威胁工作人员的问题外还存在如下的安全隐患:(1)存在缺氧窒息危害。进入料仓为有限空间作业,空气流通不畅,工人在这种密闭空间中工作存在缺氧窒息的危害。(2)存在气体中毒危害。料仓内可能存在CO等有毒有害气体,存在中毒的危害。(3)存在粉尘危害。料仓内存在粉尘物料,对作业人员裸露的皮肤、眼睛和呼吸系统等器官存在伤害。(4)存在高空坠落的风险。灰库高达数十米,属于高空作业,存在意外高空坠落的风险。采用人工的清理方式不仅存在较大的安全隐患,而且工作效率低下,劳动强度大,费用高昂。以单灰库300吨灰为例,需要三班制6人一组的工作班清理15天时间。
目前市面上并没有专门针对大型灰库清理的机器,除了使用人工,别无他法,因此,急需研发提供一种安装方便、工作效率高、环境适应性强能够满足不同直径的罐体清理需求、高可靠性、安全性好、无需人工直接操作、并能够通过检测传感系统对机器人进行精确控制的灰库清理装置。
中国专利CN103041923A公开了一种火电厂湿式电除尘器清灰水循环处理工艺。其技术方案是由以下工艺组成:来自电除尘器的冲洗极板的清灰水首先进入下流式斜板形状的沉淀池,悬浮物粉煤灰在沉淀池中进行灰水分离沉淀,去除水中部分悬浮物;经过沉淀处理后的出水进入混凝池,通过混凝药剂,细小颗粒附着在絮体上,部分沉淀,未沉淀的随污水由污水泵输出到高速石英砂结构的过滤器中,经过砂滤后,污泥从沉淀池、混凝池底部用渣浆泵抽出;去除悬浮物后,对清灰水pH值进行调整,通过清灰水循环泵输往电除尘器中循环利用。但是该专利仍然没有公开所采用的清灰设备的具体结构。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种安装方便、工作效率高、环境适应性强能够满足不同直径的粉煤灰库罐体清理需求、高可靠性、安全性好、无需人工直接操作、并能够通过检测传感系统对机器人进行精确控制的灰库清理装置,解决了现有技术中无法实现自动清灰以及清灰效率较低的技术问题。
本发明的目的可以通过以下技术方案来实现:
一种粉煤灰库多功能清灰设备,包括抱紧模块、升降连杆、辅助支架、副悬臂、高刚度机械伸缩臂、柔性清理机器人和感知监测装置,
所述抱紧模块及所述副悬臂分别连接在所述升降连杆的上下端,所述辅助支架连接在所述升降连杆上,
所述高刚度机械伸缩臂的一端与所述副悬臂连接,另一端设置所述柔性清理机器人,
所述感知监测装置设置在粉煤灰库的内壁上。
所述抱紧模块包括夹紧机构及抱紧机构,
所述夹紧机构包括升降连杆导向部件、伺服进给电机、外斜滑块、入口固定装置、外斜滑块保持架,
所述升降连杆导向部件为圆桶形结构,在开口位置有连接法兰与入口固定装置连接,在四周均匀开有四个方形开口,在桶形结构的底部开有一个圆孔,所述伺服进给电机固定在入口固定装置上,所述外斜滑块为一楔形方块,在一侧为圆弧形,上面有突出的楔形结构,圆弧面的另一侧有一个深槽,所述入口固定装置由内外两层圆筒同轴心嵌套并固定在一起组成,并且在最外层的圆筒径向方向上均匀开有四个螺纹孔,四个螺纹孔用于插入固定螺栓,两层圆筒之间有一个空隙,在最外侧圆筒口上有一个法兰,所述外斜滑块保持架为楔形结构,在一侧开有一个通孔,另一侧有两个凹槽,
所述抱紧升降机构包括夹紧电机、第一导向光杠、内斜块保持架、内斜滑块、内固定气缸、斜滑块进给装置、输送盘、第二导向光杠、进给丝杠,
所述夹紧电机固定在入口固定装置上,所述第一导向光杠、第二导向光杠上端固定在入口固定装置的上侧,下端固定在入口固定装置的下侧,所述内斜块保持架为一圆盘状构件,中间为大通孔,在最外侧均匀布置了三个小通孔,所述内斜滑块与外斜滑块结构相同,所述内固定气缸固定在输送盘上,所述斜滑块弹回装置为一方块,固定在输送盘上,中间有一个圆通孔,所述输送盘为盘形结构,中间设有通孔,最外侧有三个均匀布置的圆孔,所述进给丝杠上端与伺服进给电机连接,下端与入口固定装置的下端配合。
所述升降连杆包括快速接头,两个标准节,定位凸台,所述快速接头为一圆筒状结构,一端与标准节连接,另一端有向内突出的环形结构,所述定位凸台连接在两个标准节于标准节之间。
所述升降连杆经基础节组件与所述辅助支架及副悬臂连接,所述基础节组件包括基础节连接法兰,基础节,水平旋转电机,减速器,连接装置,减速器固定支架,
位于基础节上用于基础节和之间的连接;所述基础节为一杆件,下侧中间中空,经所述基础节连接法兰与辅助支架连接,所述水平旋转电机固定在所述基础节下侧中空空间中,所述减速器与水平旋转电机相连,所述连接装置为一圆筒形结构,上下对称,两侧均有连接法兰,上侧与减速器固定支架相连,下侧与副悬臂连接。
所述辅助支架包括辅助回转电机、辅助减速器、连接块、第一辅助气压缸、第一电动伸缩缸、支撑部件、第二电动伸缩缸,第二辅助气压缸,支撑架,
所述辅助回转电机固定在连接机构上,所述辅助减速器与辅助回转电机相连,用以传递电机的转矩;所述连接块为一方块,在一端有向外突出的铰链,用于与连接机构相连,在另一端有一个凹槽,在垂直于槽的方向开有三个贯穿槽的通孔,两边的通孔连接第一电动伸缩缸和第二电动伸缩缸,中间的通孔固定支撑架,所述第一辅助气压缸一端连接在支撑架上,另一侧连接在第一电动伸缩缸上,所述第二辅助气压缸一端连接在支撑架上,另一侧连接在第二电动伸缩缸上,所述第二电动伸缩缸与第一电动伸缩缸呈对称布置,所述支撑架为一个长杆状构件,一端固定在连接块上,另一端有铰链用于连接第一电动伸缩缸和第二辅助气压缸。
所述副悬臂包括水平旋转电机、竖直旋转电机、连接支架、横梁减速器、短臂横梁、副恒压缸、导轮、副旋转刀片;
所述竖直旋转电机固定在连接支架上,所述连接支架为一方块形,在一端有两个伸出的半圆形耳,在圆心处开有固定短臂横梁和高刚度机械伸缩臂(5)的通孔,在一侧上的耳上有螺纹孔固定横梁减速器,在垂直于耳的上侧平面上有用于连接水平旋转电机的螺纹孔;所述短臂横梁截面为矩形,在末端有连接头用于和连接装置连接,中间部分中空,里面插入另一节横梁共同组合成一个可以收缩的横梁,在其内部中空空间中有电动推杆,所述副恒压缸由内外两个缸体组成并用密封装置密封,所述导轮安装在固定支架上,所述副旋转刀片截面为圆柱形,在其表面有用于清理墙壁的螺旋形刀片,内部放置一个电机,电机底座固定在固定支架上,带动副螺旋刀片回转清理内壁。
所述高刚度伸缩机械臂包括依次嵌套的数个横梁,各横梁的截面尺寸依次减小形成可伸缩结构,尺寸最小的横梁的末端设置固定连接法兰,内部设置级联电动伸缩缸。
所述连接法兰还与斜拉绳连接,该斜拉绳经顶部的卷扬控制收放。
所述柔性清理机器人包括恒压缸、车体、车轮、第一旋转滚刀、铰接装置、柔性气压缸、喷气口、激光测距仪、摄像头、第二旋转滚刀,
所述恒压缸由内外两个缸体组成并用密封装置密封,所述车体的两侧分别对称开有两个穿过车轴的通孔,在两侧侧面腰上开有一个用于柔性气压缸工作的开口,在开口上方有两片突出的半圆形的耳,耳中间开有通孔用于铰接柔性气压缸,在车顶部圆周方向上开有与恒压缸连接的通孔,在车身侧面两侧对称开有连接刀架的孔;所述车轮连接在车轴上,所述第一旋转滚刀和第二旋转滚刀截面为圆柱形,在其表面有用于清理墙壁的螺旋形刀片,内部中空,放置一个电机,电机底座固定在刀架上,带动螺旋滚刀回转清理墙壁;所述铰接装置连接刀架与柔性气压缸;所述柔性气压缸为气压伸缩缸,上端连接在车体上,下端连接在刀架上用于带动旋转滚刀上下移动,所述喷气口固定在激光测距仪、摄像头的四周,所述激光测距仪固定在车体中间,所述摄像头固定在车体内部。
所述感知监测装置包括库顶视屏监测器及库顶激光雷达。
与现有技术相比,本发明所公开的技术方案具有以下优点:
1、本发明具备多种作业模式,可满足库内不同位置清灰作业需求。本发明多功能清灰装置伸缩机器臂两侧分别配有滚筒状旋转除灰单元和清灰机器人,可实现库体内壁面除灰作业,伸缩机械臂水平回转配合清灰机构,实现库底清灰作业,同时清灰结构更换旋转毛刷装置,可满足库底气槽清灰需求。
2、本发明作业范围大,可满足库内直径大跨度变化下清灰作业需求:本发明多功能清灰装置输送连杆采用多节连接接方式,可实现清灰装置于库内的纵向调整;本装置机械伸缩臂具备横向长距离伸缩性能,可满足库内直径大跨度变化范围内的清灰作业需求。
3.本发明控制精度高、刚性大、可满足库内精确作业要求:本发明多功能清灰装置夹紧机构具备梯形牙结构与输送杆件表面梯形环槽配合,保证二者相对位置固定,可满足机构高控制精度要求;本装置配有牵拉机构对机械伸缩臂末端辅助牵拉,同时伸缩机械臂采用两侧布置方式,实现了两侧重力平衡,机械伸缩臂壳体截面采用优化设计,减轻臂体重力,大幅提升装置整体刚度,实现装置于库内的精确作业。
4、本发明具备柔性作业性能,可满足库体内壁不同曲率下清理作业需求:本发明多功能清灰装置伸缩机械臂末端配有恒压单元与清灰机器人连接,实现机器人与库体内壁紧密贴合,清灰机器人配有压力调节单元与清灰结构相连,实现清灰毛刷与库体内壁的可靠接触,满足装置于库体内壁不同曲率下清理作业需求。
5、本发明具备环境感知能力,可满足库外盲操清理作业需求:本发明多功能清灰装置配置环境感知模块具备激光探测单元、视觉监测单元及辅助照明单元,可实现库内环境实时监测及清灰机器人位置精确感,可实现装置清灰作业的库外盲操。
6、本发明结构紧凑,安装方便,防尘性能好,能够满足装置狭小人口下进给要求:本发明多功能清灰装置分置多个模块,大幅精简装置整体结构,模块末端配有通用连接法兰,便于模块间的固定安装;本装置配有通用防尘元件,固定结构配置整体防护罩,相对运动部件配置曲路结构、防尘毡圈和内部正压充气气路,以保证装置关键部位密封性能,实现多粉尘环境下正常作业;本装置机械伸缩臂结构与吊装装置刚性连接,连接后可实现水平旋转,大幅收缩装置横向跨度,以满足装置在狭小人口下的进给要求。
附图说明
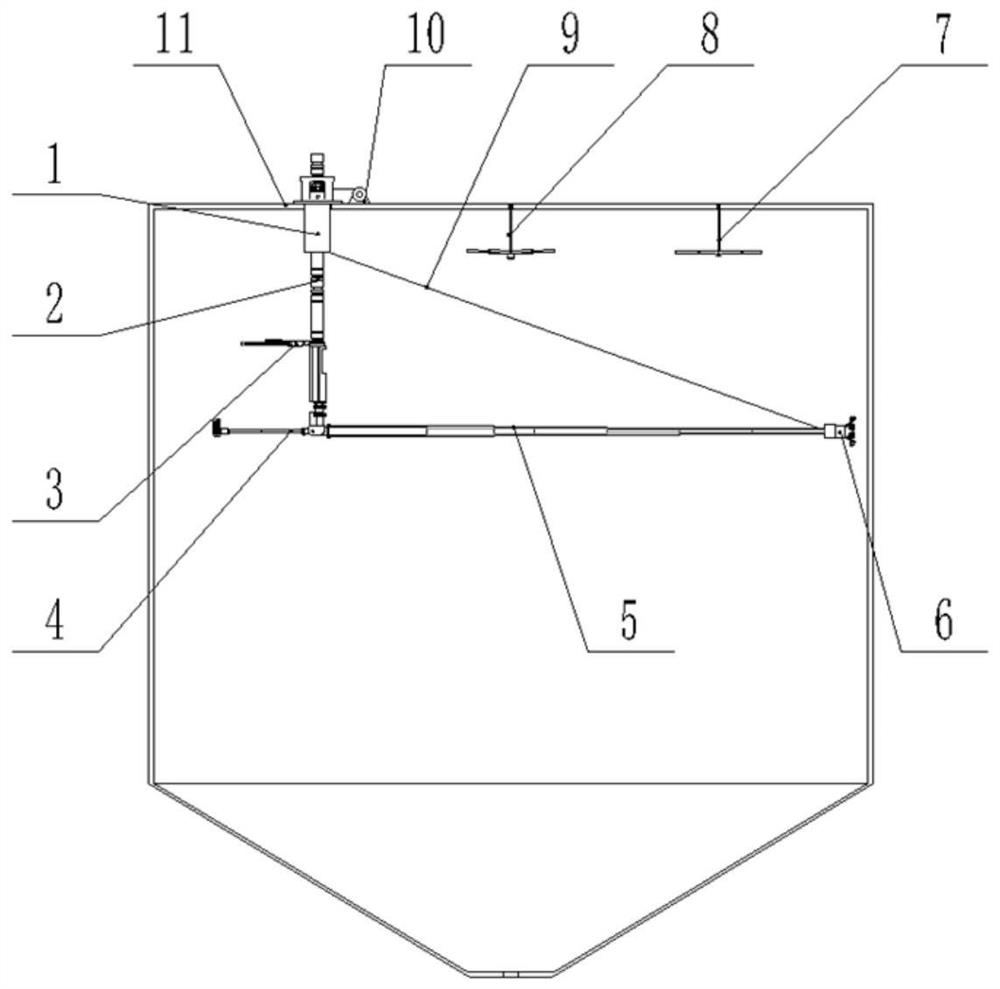
图1为实施例中本发明的总体结构示意图;
图2为实施例中抱紧模块的夹紧机构的结构示意图;
图3为实施例中抱紧模块的抱紧机构的结构示意图;
图4为实施例中升降连杆的结构示意图;
图5为实施例中辅助支架的结构示意图;
图6为实施例中副悬臂的结构示意图;
图7为实施例中基础节组件的结构示意图;
图8为实施例中高刚度伸缩机械臂的结构示意图;
图9为实施例中高刚度伸缩缸机械臂的结构示意图;
图10为实施例中柔性清理机器人的结构示意图;
图11为实施例中基础节组件的的结构示意图;
图12为实施例中本发明在投放状态的结构示意图;
图13为实施例中本发明在张开状态的结构示意图;
图14为实施例中本发明在清理罐底灰尘的结构示意图。
图中:
1-抱紧模块,
101-升降机构导向部件,102-伺服进给电机,103-外斜滑块,104-入口固定装置,105-外斜滑块保持架,106-夹紧电机,107-第一导向光杠,108-内斜块保持架,109-内斜滑块,110-内固定气缸,111-斜滑块进给装置,112-输送盘,113-第二导向光杠,114-进给丝杠,
2-升降连杆,
201-快速接头,202-标准节,203-标准节连接螺纹,204-定位凸台,205-标准节,206-标准节连接螺纹,
3-辅助支架,
301-辅助回转电机,302-辅助减速器,303-连接块,304-第一辅助气压缸,305-第一电动伸缩缸,306-支撑部件,307-第二电动伸缩缸,308-第二辅助气压缸,309-支撑架,
4-副悬臂,
401-水平旋转电机,402-竖直旋转电机,403-连接支架,404-横梁减速器,405-短臂横梁,406-副恒压缸,407-导轮,408-副旋转刀片,
5-高刚度机械伸缩臂,
501-第一横梁,502-第二横梁,503-第三横梁,504-第四横梁,505-第五横梁,506-第六横梁,507-第七横梁,508-连接法兰,509-级联电动伸缩缸,
6-柔性清理机器人,
601-恒压缸,602-车体,603-车轮,604-第一旋转滚刀,605-铰接装置,606-柔性气压缸,607-喷气口,608-激光测距仪,609-摄像头,610-第二旋转滚刀,
7-库顶视屏监测器,
8-库顶激光雷达,
9-斜拉绳,
901-基础节连接法兰,902-基础节,903-水平旋转电机,904-减速器,905-连接装置,906-减速器固定支架,
10-卷扬,
11-粉煤灰库。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
实施例
本发明一种粉煤灰多功能清灰装置(简称清灰装置,如图1所示),包括抱紧模块1(由夹紧机构和抱紧机构组成)、辅助支架3、副悬臂4、高刚度机械伸缩臂5、柔性清理机器人6和感知监测装置等组件,主要用于清理粉煤灰库11的内壁。
夹紧机构的结构如图2所示,包括升降连杆导向部件101,伺服进给电机102,外斜滑块103,入口固定装置104,外斜滑块保持架105;抱紧机构的结构如图3所示,包括夹紧电机106,第一导向光杠107,内斜块保持架108,内斜滑块109,内固定气缸110,斜滑块进给装置111,输送盘112,第二导向光杠113,进给丝杠114,升降连杆2的结构如图4所示,包括快速接头201,标准节202,标准节连接螺纹203,定位凸台204,标准节205,标准节连接螺纹206,基础节组件的结构如图7、11所示,包括基础节连接法兰901,基础节902,水平旋转电机903,减速器904,连接装置905,减速器固定支架906;辅助支架3的结构如图5所示,包括辅助回转电机301,辅助减速器302,连接块303,辅助气压缸304,第一电动伸缩缸305,支撑部件306,第二电动伸缩缸307,第二辅助气压缸308,支撑架309;副悬臂4的结构如图6所示,包括水平旋转电机401,竖直旋转电机402,连接支架403,横梁减速器404,短臂横梁405,副恒压缸406,导轮407,副旋转刀片408;高刚度伸缩机械臂5的结构如图8-9所示,包括第一横梁501,第二横梁502,第三横梁503,第四横梁504,第五横梁505,第六横梁506,第七横梁507,连接法兰508,级联电动伸缩缸509;柔性清理机器人6的结构如图10所示,包括恒压缸601,车体602,车轮603,旋转滚刀604一,铰接装置605,柔性气压缸606,喷气口607,激光测距仪608,摄像头609,第二旋转滚刀610;感知监测装置包括库顶视屏监测器7,库顶激光雷达8。
接下来进一步对上述组件以及相互之间的位置关系、联动关系及工作进程等做进一步的说明。
夹紧机构包括升降连杆导向部件101,伺服进给电机102,外斜滑块103,入口固定装置104,外斜滑块保持架105;升降连杆导向部件101为圆桶形结构,在开口位置有连接法兰用于和入口固定装置104连接,在四周均匀开有四个方形开口,用于锁紧螺母的穿过,在桶形结构的底部开有一个圆孔,用于标准节202的导向;伺服进给电机102固定在入口固定装置104上,用于为丝杠114提供动力;外斜滑块103为一楔形方块,在一侧为圆弧形,圆弧面可以和标准节202的表面相切,并且上面有突出的楔形结构,用于嵌入标准节202上的楔形槽内,圆弧面的另一侧有一个深槽,用于与外斜滑块保持架105配合并在移动的过程中实现导向;入口固定装置104由内外两层圆筒同轴心嵌套并固定在一起组成,并且在最外层的圆筒径向方向上均匀开有四个螺纹孔,四个螺纹孔用于插入固定螺栓,两层圆筒之间有一个空隙,用于入口固定装置104和罐体入口处结构的配合定位,在最外侧圆筒口上有一个法兰,用于和连杆导向部件101连接;外斜滑块保持架105为楔形结构,在一侧开有一个通孔,用于把其固定在入口固定装置104上,另一侧有两个凹槽,用于和外斜滑块103配合对其进行限位,利用夹紧机构可以快速将入口固定装置进行安装,以提高工作效率;
抱紧升降机构包括抱紧机构、升降连杆以及基础节组件,所包括的零部件为夹紧电机106,第一导向光杠107,内斜块保持架108,内斜滑块109,固定气缸110,斜滑块弹回装置111,输送盘112,第二导向光杠113,进给丝杠114,快速接头201,标准节202,标准节连接螺纹203,定位凸台204,标准节205,标准节连接螺纹206,基础节连接法兰901,基础节902,水平旋转电机903,减速器904,连接装置905,减速器固定支架906;夹紧电机106固定在入口固定装置104上,为外斜滑块103的运动提供动力;第一导向光杠107、第二导向光杠113上端固定在入口固定装104置的上侧,下端固定在入口固定装104置的下侧,用于为输送盘112和内斜块保持架108的运动限位;内斜块保持架108为一圆盘状构件,中间为大通孔,可以使得标准节202穿过,在最外侧均匀布置了三个小通孔,其中有两个通孔内放置直线轴承用于在第一导向光杠107、第二导向光杠113上上下滑动,另一个孔用于穿过丝杠114并保证留有一定间隙,在内侧圆形通孔上有三个槽形,用于与内斜滑块109配合并为其运动限位;内斜滑块109与外斜滑块103结构相同,用于夹紧标准节202;内固定气缸110固定在输送盘112上,用于为内斜滑块109的运动提供动力;斜滑块弹回装置111为一方块,固定在输送盘112上,中间有一个圆通孔,用于穿过内斜滑块109,当固定气缸110收缩后,配合弹簧使内斜滑块109复位;输送盘112为盘形结构,中间有能保证标准节202穿过的通孔,最外侧有三个均匀布置的圆孔,其中两个安装有直线轴承用于在光杠上滑动,另一个与进给丝杠114配合,在进给丝杠114的驱动下带动整体移动部件下移;进给丝杠114上端与伺服进给电机102连接,下端与入口固定装置104的下端配合,能够在电机的驱动下带动输送机构向下移动;快速接头201为一圆筒状结构,一端内部有用于和标准节202连接的连接螺纹,另一端有向内突出的环形结构,用于卡在标准节202上不脱落;标准节连接螺纹203用于和快速接头201上的螺纹配合以实现两节标准节的快速安装;定位凸台204位于标准节202的一端,用于和另一节标准节进行定位;基础节连接法兰901位于基础节上用于基础节和辅助支撑装置3之间的连接;基础节902为一杆件,下侧中间中空,水平旋转电机903固定在其中间,上侧中间贯穿,方便装置收起时副旋转刀片408放入其中以减小收起时整体的截面尺寸;水平旋转电机903固定在基础节902的下侧中空空间中,为高刚度机械伸缩臂提供动力;减速器904与水平旋转电机903相连,固定在减速器固定支架906中用以传递转矩;连接装置905为一圆筒形结构,上下对称,两侧均有连接法兰,上侧与减速器固定支架906相连,下侧与水平旋转电机401相连;减速器固定支架906为一圆筒形,上下均有连接法兰,上侧与基础节902相连,下侧与连接装置905相连,中间中空用于放置固定减速器;
辅助支撑装置3包括辅助回转电机301,辅助减速器302,连接块303,第一辅助气压缸304,第一电动伸缩缸305,支撑部件306,第二电动伸缩缸307,第二辅助气压缸308,支撑架309;辅助回转电机301固定在连接机构上,用于给辅助支撑装置3的竖直回转提供动力;辅助减速器302固定在连接机构上,与辅助回转电机301相连,用以传递电机的转矩;连接块303为一方块,在一端有向外突出的铰链,用于与连接机构相连,在另一端有一个凹槽,在垂直于槽的方向开有三个贯穿槽的通孔,两边的用于连接第一电动伸缩缸305和第二电动伸缩缸307,中间的用于固定支撑架309,第一辅助气压缸304一端连接在支撑架306上,另一侧连接在电动伸缩缸305上用于为电动伸缩缸305的张开提供动力;第一电动伸缩缸305一端连接有支撑部件306,末端与连接块303相连,用于为工作末端提供辅助支撑;第二电动伸缩缸307与第一电动伸缩缸305对称布置,工作方式和第一电动伸缩缸305一样;第二辅助气压缸308与第一辅助气压缸304布置及工作方式一样;支撑架309为一个长杆状构件,一端有固定装置将其固定在连接块303上,另一端有铰链用于连接第一电动伸缩缸305和第二辅助气压缸308,辅助装置在水平方向上给升降连杆一个支反力,可以有效提高升降连杆的刚度,使得工作更加稳定;
副悬臂4包括水平旋转电机401,竖直旋转电机402,连接支架403,横梁减速器404,短臂横梁405,副恒压缸406,导轮407,副旋转刀片408;竖直旋转电机402固定在连接支架403上,用于为短臂横梁405和高刚度机械伸缩臂5的竖直旋转提供动力;连接支架403为一方块形,在一端有两个伸出的半圆形耳,在圆心处开有用于固定短臂横梁405和高刚度机械伸缩臂5的通孔,在一侧上的耳上有螺纹孔用于固定横梁减速404,在垂直于耳的上侧平面上有用于连接水平旋转电机401的螺纹孔;短臂横梁405截面为矩形,在末端有连接头用于和连接装置连接,中间部分中空,里面插入另一节横梁共同组合成一个可以收缩的横梁,在其内部中空空间中有电动推杆,其伸长和收缩由电动推杆控制;副恒压缸406由内外两个缸体组成并用密封装置密封,内部充满SMC气体,用于维持缸体内恒定压力;导轮407安装在固定支架上,用于减小横梁在回转时工作末端与罐体墙壁之间的摩擦;副旋转刀片408截面为圆柱形,在其表面有用于清理墙壁的螺旋形刀片,内部中空,放置一个电机,电机底座固定在固定支架上,用于带动螺旋刀片408回转清理墙壁,副悬臂4和高刚度机械伸缩臂前端的机器人一前一后协同工作以提高工作装置的效率;
高刚度伸缩机械臂5包括数个相互嵌套连接的横梁,如本实施例中包括有第一横梁501,第二横梁502,第三横梁503,第四横梁504,第五横梁505,第六横梁506,第七横梁507这七个相互嵌套的横梁,以及连接法兰508,级联电动伸缩缸509,斜拉绳9,卷扬10;第一横梁501,第二横梁502,第三横梁503,第四横梁504,第五横梁505,第六横梁506,第七横梁507截面均是矩形的长杆状构造,内部中空,每一部分的壁厚均相同,各横梁的截面尺寸依次减小,并保证横梁之间可以依次嵌套配合形成可伸缩结构,在第一横梁501的另一端有一个用于连接的方形法兰;连接法兰508固定在截面尺寸最小的第七横梁507的末端,用于连接恒压缸601;级联电动伸缩缸509由六个电动推杆级联而成,并放置在第七横梁507中,其第一级与连接法连508连接,最后一级与第一横梁501的方形法兰连接,级联电动推杆可以在控制下依次伸缩带动最外面的横梁依次伸缩来实现高刚度机械伸缩臂的伸缩控制,以实现工作装置大范围作业,满足不同直径的罐体清理需求;斜拉绳9末端固定在连接法兰508上用于在高刚度机械伸缩臂5末端提供一个拉力使得伸缩臂的刚度更大以满足高刚度需求;卷扬10固定在粉煤灰库的顶部,用于斜拉绳9的收放并为斜拉绳提供张力以满足对横梁的牵拉作用。
柔性清理机器人包括恒压缸601,车体602,车轮603,旋转滚刀604一,铰接装置605,柔性气压缸606,喷气口607,激光测距仪608,摄像头609,第二旋转滚刀610;恒压缸601由内外两个缸体组成并用密封装置密封,内部充满SMC气体,用于维持缸体内恒定压力;车体602为薄壁部件,其侧视图为等腰梯形,在两侧分别对称开有两个通孔,用于穿过车轴,在两侧侧面腰上开有一个用于柔性气压缸606工作的开口,在开口上方有两片突出的半圆形的耳,耳中间开有通孔用于铰接柔性气压缸606,在车顶部圆周方向上开有通孔,用于和恒压缸601连接,在车身侧面两侧对称开有用于连接刀架的孔;车轮603连接在车轴上用于减小工作时与墙面之间的摩擦力使得机器人工作过程中更加稳定;第一旋转滚刀604和第二旋转滚刀610截面为圆柱形,在其表面有用于清理墙壁的螺旋形刀片,内部中空,放置一个电机,电机底座固定在刀架上,用于带动螺旋滚刀回转清理墙壁;铰接装置605用于连接刀架与柔性气压缸606;柔性气压缸606是一个气压伸缩缸,上端连接在车体602上,下端连接在刀架上用于带动旋转滚刀上下移动,用于控制刀片与墙壁之间的受力以达到最佳清理效果;喷气口607固定在激光测距仪608和摄像头609的四周,用以形成气墙防止激光测距仪608和摄像头609被灰尘弄脏;激光测距仪608固定在车体602中间,用于在工作工程中实时检测车体与墙壁之间的距离,以实现对清理工作的动态感知调节;摄像头609固定在车体602内部,用于在工作工程中实时监测机器人的工作状态并对清理状况进行实时的监测以实现机器人在清理墙壁过程中的柔性控制;
感知监测装置包括库顶视屏监测器7,库顶激光雷达8;库顶视屏监测器7和库顶激光雷达8从库顶的观察口放入并固定在库顶,用于监测灰库内的情况,对灰库清理工作进行实时的监控对远程控制进行有效指导;
本发明一种粉煤灰库多功能清灰装置工作原理和过程如下所示:
在装置安装工作前,先将库顶激光雷达和库顶视频检测通过分布在库顶的多个检测口投放进去,通过预先释放监测装置以实现对罐体内部的环境进行监测并作出合理的清理方案和安全隐患紧急处置方案,除此之外,检测模块最先进行投放还可以有效地对接下来的设备安装进行实时的监测,以实现对安装过程和工作过程的监控全覆盖,能有效地指导除灰工作全过程的安全有序进行;安装设备时先将抱紧模块套在罐体入口处向外突出的环形圆柱上,然后利用锁紧模块将抱紧模块锁死固定在罐体入口处,这样就完成了主体部件的快速固定以满足工作效率高的要求;之后在外界将辅助支撑装置、高刚度伸缩机械臂、柔性清理机器人和专用清理模块组装好并连接在升降连杆上,组装好的机构应收缩在一起以方便从入口固定装置中的空腔内实现向内投送,工作装置的投放状态如图12所示,当工作装置初始投放状态完成后,位于入口固定装置上的抱紧锁死机构一在电机的驱动下,将斜滑块向前推动,直至抱紧锁死升降连杆。当升降连杆位置固定好后,位于基础节上的辅助支撑装置在电机的驱动下发生竖直回转,直至辅助装置与升降连杆呈90°角,当辅助支撑装置的角度调整好之后,位于辅助支撑装置上的支撑开合装置开始工作,将两个支撑部件电动推杆等角度撑开并调整使之张开到合理角度,当角度调整合适后电动推杆开始工作,将支撑部件向外推出直至支撑部件末端接触罐体墙壁实现升降连杆的水平支撑,接着固定在基础节上的电动机开始工作使得高刚度伸缩机械臂竖直回转直至与升降连杆呈90°夹角,位于柔性清理机器人上的气压伸缩缸也将工作将旋转滚刀张开,完全张开后的工作装置如图13所示,此时就剩高刚度伸缩机械臂还未伸展开,这样工作前的准备工作就完成,开始工作时,先控制高刚度机械伸缩臂伸长,在高刚度机械伸缩臂工作工程中位于罐体外的卷扬同时工作使得斜拉绳始终保持一定的张力,当机械伸缩臂伸长到一定长度后,柔性清理机器人会接触罐体墙壁并压缩柔性恒压单元,恒压单元内充满SMC气体,当恒压单元内压力增大超出阈值后,会向控制机构报警,控制机构接收到报警信号会停止高刚度机械伸缩臂的伸长,机械臂调整好后,清理机器人上旋转滚刀开始预旋转,然后气压缸伸长使得旋转滚刀接触墙壁,当滚刀接触到墙壁时恒压单元再次受到压缩发出警报信号,在计算机的控制下气压缸停止伸长,机器人开始清理墙壁,除了柔性恒压单元外,机器人内部还设置有摄像头和激光测距仪,恒压单元、摄像头和激光测距仪联合工作,可以实现全方位检测机器人位置状态,同时摄像头还可以实时对清理后的墙面进行检测评估,以查看灰块是否清理干净,从而对清理工作进行有效指导实现盲操作业以满足工作过程无需人工进入操作的要求;在机器人清理墙壁的过程中,位于基础节末端的电机也同时工作,以等角速度带动高刚度机械伸缩臂旋转以实现对罐体墙壁360°的清理,由于高刚度机械伸缩臂的回转中心不在罐体圆心处,回转过程中会引起受力的改变,恒压单元和激光测距仪会实时感知机器人与墙壁的接触情况,并将数据返回给控制计算机,计算机会根据返回数据控制高刚度机械伸缩臂伸长或者收缩,对清理工作实时控制以满足柔性清理的需求;当清理完一层之后,需要向下移动时,抱紧输送机构在滚珠丝杠的驱动下向下移动所需的距离,然后停止直到机器人清理完这一层后接着往下移动,当抱紧输送机构移动到丝杠的末端时,需要加装标准节,两节标准节对齐后利用标准节上的快速锁紧装置快速对接锁紧,这时位于入口固定装置上的抱紧锁死机构工作将升降连杆上端抱紧锁死,然后位于抱紧输送机构上的抱紧锁死机构松开,输送机构在丝杠的驱动下向上移动,移动到上端后再次抱紧锁死输送连杆,然后位于入口固定装置上的抱紧锁死机构松开,输送机构又可以在丝杠的带动下向下移动一节标准节长度的距离,直至再次到达丝杠末端以实现高效作业的需求;输送机构在丝杠的驱动下以此循环作业把工作装置慢慢向下输送完成罐体墙壁的清理工作,当墙壁清理完成后,此时机械臂末端已经移动到了库底,这时取下清理机器人,换上清理模块,清理模块上的毛刷在灰库底部清扫,可以将灰库底部残留的灰尘从出灰口扫出,实现对库底的清理,如图14所示。
在本发明的描述中,需要理解的是,术语、“上方”、“底部”、“侧部”、“中间”等指示方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的组件或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
上述对实施例的描述是为便于该技术领域的普通技术人员能理解和使用发明。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。
- 一种粉煤灰库多功能清灰设备
- 一种新型的多功能粉煤灰储料仓干燥设备