混合控制式吻合器
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及医疗器械技术领域,特别是涉及一种混合控制式吻合器。
背景技术
吻合器利用钛钉对组织进行离断或吻合,操作简便迅速,大大缩短了手术时间,可以替代传统的手工缝合。吻合器被广泛应用在微创手术中,已成为辅助于刀口缝合过程中不可缺少的一种医疗器械。
现有技术中吻合器的转向控制方式单一,无法满足多样的吻合需求,同时也造成了吻合器应用的局限性。
发明内容
本发明主要解决的技术问题是提供一种混合控制式吻合器,能够根据实际的切割需求选择自适应模式和/或精控模式来混合控制刀头转向,控制方式灵活,满足不同位置组织的吻合需求,增加了吻合器适用范围。
为解决上述技术问题,本发明采用的一个技术方案是:提供一种混合控制式吻合器,包括:枪身组件、枪管组件和刀头,其特征在于,在枪身组件和枪管组件之间设置有主控旋钮和旋转头,刀头的转向可实现自适应模式和/或精控模式的混合控制:
自适应模式,拉动旋转头后直接施加外力来控制刀头转动到使用角度;
精控模式,拉动旋转头后调节主控旋钮控制刀头转动到使用角度。
在本发明一个较佳实施例中,旋转头与旋转主体相连,主控旋钮连接在旋转主体上:
自适应模式,先向后拉动旋转头使之与旋转主体分离,再直接向刀头施加外力来控制刀头转动到使用角度;
主控旋钮控制模式,先向后拉动旋转头使之与旋转主体分离,然后转动主控旋钮带动刀头转动到使用角度,再松开旋转头将刀头锁定在使用角度。
在本发明一个较佳实施例中,旋转主体包括相互连接在一起的固定上盖和固定下盖,固定上盖和固定下盖之间设置有联动的拨叉和转动组件,转动组件包括滚珠以及带动滚珠进行转动的滚珠压片。
在本发明一个较佳实施例中,拨叉包括拨叉方形柱以及连接在拨叉方形柱底部的拨叉盘,拨叉方形柱的尾端部与拨叉盘之间设置有限位台阶。
在本发明一个较佳实施例中,旋转头的前端设置有旋转头挡块,拨叉盘朝向旋转头的圆周侧壁上设置有与旋转头挡块配合的拨叉齿,旋转头向后拉动时旋转头挡块与拨叉齿分离,旋转头与旋转主体连接时旋转头挡块与拨叉齿咬合。
在本发明一个较佳实施例中,主控旋钮内部设置有与拨叉方形柱头端部互配的主控旋钮方形孔,滚珠压片中心设置有与拨叉方形柱尾端部互配的滚珠压片方形孔,拨叉方形柱的头端部卡装在主控旋钮内壁,拨叉方形柱的尾端部安装在滚珠压片中心的滚珠压片方形孔,限位台阶卡装在滚珠压片底端对拨叉进行限位固定。
在本发明一个较佳实施例中,滚珠压片呈圆环状设置,滚珠沿着滚珠压片的圆周方向均布设置,滚珠压片带动滚珠绕着滚珠压片的中心轴旋转。
在本发明一个较佳实施例中,沿着滚珠压片的圆周方向开设有六个滚珠定位孔,滚珠定位孔内设置滚珠定位套筒,滚珠定位套筒内部设置有滚珠弹簧,滚珠安装在滚珠定位套筒内并在滚珠弹簧作用下露出滚珠定位套筒。
在本发明一个较佳实施例中,固定上盖内表面均布有十二个滚珠限位孔,滚珠均匀坐落在固定上盖的其中六个滚珠限位孔内。
在本发明一个较佳实施例中,转动主控旋钮,带动拨叉转动,拨叉带动滚珠压片和滚珠转动,滚珠受力内缩,并且与当前的滚珠限位孔分离,直至旋转到下一孔位并落入下一孔位时会产生声响,形成段落感。
本发明的有益效果是:本发明混合控制式吻合器能够根据实际的切割需求选择自适应模式和/或精控模式来混合控制刀头转向,控制方式灵活,满足不同位置组织的吻合需求,增加了吻合器适用范围。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:
图1是本发明转向控制组件中旋转头后拉前一较佳实施例的结构示意图;
图2是本发明旋转头挡块与拨叉齿咬合状态一较佳实施例的结构示意图;
图3是本发明转向控制组件中旋转头后拉后一较佳实施例的结构示意图;
图4是本发明旋转头挡块与拨叉齿分离状态一较佳实施例的结构示意图;
图5是本发明主控旋钮安装在旋转主体上的一较佳实施例的结构示意图;
图6是图5的B-B向剖视图;
图7是图5的D-D向剖视图;
图8是本发明中固定上盖一较佳实施例的结构示意图;
图9是本发明中转动组件一较佳实施例的结构示意图;
图10是本发明中滚珠压片一较佳实施例的结构示意图;
图11是本发明中滚珠安装结构一较佳实施例的结构示意图;
图12是图11的A-A向剖视图;
图13是本发明中拨叉一较佳实施例的结构示意图;
图14是本发明主控旋钮一较佳实施例的结构示意图;
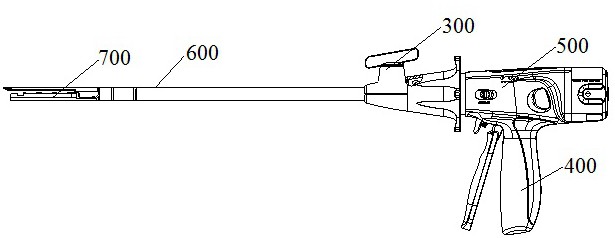
图15是本发明混合控制式吻合器中旋转头后拉前一较佳实施例的结构示意图;
图16是本发明混合控制式吻合器中旋转头后一较佳实施例的结构示意图;
附图中各部件的标记如下:100、主控旋钮,110、主控旋钮方形孔,200、旋转主体,210、固定上盖,211、滚珠限位孔,220、固定下盖,230、拨叉,231、拨叉方形柱,232、拨叉盘,233、限位台阶,234、拨叉齿,
240、滚珠,250、滚珠压片,251、滚珠压片方形孔,252、滚珠定位孔,253、滚珠定位套筒,254、滚珠弹簧,300、旋转头,310、旋转头挡块,
400、手柄,500、枪身组件,600、枪管组件,700、刀头。
具体实施方式
下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1至图16,本发明实施例包括:
实施例一
一种转向控制组件,包括旋转头300、与旋转头300连接的旋转主体200以及安装在旋转主体200上的主控旋钮100,旋转头300与旋转主体200可分离式连接在一起。
旋转主体200包括相互连接在一起的固定上盖210和固定下盖220,在固定上盖210和固定下盖220之间设置有联动的拨叉210和转动组件,转动组件包括滚珠240以及带动滚珠240进行转动的滚珠压片250。
主控旋钮100安装在旋转主体200上并可控制拨叉210和转动组件的旋转,旋转头300安装在旋转主体200尾端并可相对旋转主体200向后拉动实现与旋转主体200分离。
拨叉230包括拨叉方形柱231以及连接在拨叉方形柱231底部的拨叉盘232,拨叉方形柱231的尾端部与拨叉盘232之间设置有限位台阶233,限位台阶233卡装在滚珠压片250底端对拨叉230进行限位固定。
旋转头300的前端设置有旋转头挡块310,拨叉盘231朝向旋转头300的圆周侧壁上设置有与旋转头挡块310配合的拨叉齿234,向后拉动旋转头300时旋转头挡块310与拨叉齿234分离,此时才可转动主控旋钮100; 旋转头挡块310与拨叉齿234咬合时,旋转头300与旋转主体200无缝隙连接在一起,此时主控旋钮100无法转动。
主控旋钮100内部设置有与拨叉方形柱231头端部互配的主控旋钮方形孔110,拨叉方形柱231的头端部卡装在主控旋钮100内壁,当转动主控旋钮100时,带动拨叉230转动;滚珠压片250中心设置有与拨叉方形柱231尾端部互配的滚珠压片方形孔251,拨叉方形柱231的尾端部安装在滚珠压片中心的滚珠压片方形孔251,当转动拨叉230时,带动滚珠压片250转动。
进一步地,滚珠压片250呈圆环状设置,滚珠240沿着滚珠压片250的圆周方向均布设置,滚珠压片250带动滚珠240绕着滚珠压片250的中心轴旋转。
沿着滚珠压片250的圆周方向开设有六个滚珠定位孔252,滚珠定位孔252内设置滚珠定位套筒253,滚珠定位套筒253内部设置有滚珠弹簧254,滚珠240安装在滚珠定位套筒253内并在滚珠弹簧254作用下露出滚珠定位套筒253端部;固定上盖210内表面均布有十二个滚珠限位孔211,装配完成后,滚珠240均匀坐落在固定上盖210的其中六个滚珠限位孔211内。
转动主控旋钮100,带动拨叉230转动,拨叉230带动滚珠压片250和滚珠240转动,转动过程中滚珠240受力内缩,并且与当前的滚珠限位孔211分离,直至旋转到下一孔位并落入下一孔位时会产生声响,形成主控旋钮100相对旋转主体200转动时的段落感。
实施例二
一种混合控制式吻合器,包括枪身组件500、枪管组件600和刀头700,在枪身组件500和枪管组件600之间设置有实施例一中的转向控制组件,向后拉动旋转头300使之与旋转主体100分离,然后转动主控旋钮100带动刀头700转动到使用角度,再松开旋转头300将刀头700锁定在使用角度,实现精控。
精控模式的操作过程为:
先将旋转头300向后拉动,当旋转头300后拉到位后,旋转头挡块310与拨叉齿234分离,此时主控旋钮100才可旋转;
然后转动主控旋钮100,主控旋钮100会带动拨叉230转动,拨叉230带动滚珠压片250转动,滚珠压片250带动滚珠240绕着滚珠压片250的中心轴旋转,旋转过程中滚珠240受力会内缩,并且与当前的滚珠限位孔211分离,直至旋转到下一孔位并落入下一孔位时会产生声响,产生段落感;
当转动主控旋钮100控制刀头旋转到需要的角度时,再松开旋转头300,此时拨叉齿234与旋转头挡块310齿合,刀头700的旋转角度被锁定。
刀头采用精控模式控制转向时,在操作过程中段落感很强,能够对转向起到很好的提示作用,同时保证吻合器刀头的旋转角度更加精准可控,多用于缝合体内各种组织、脏器及血管等。
实施例三
一种吻合器,包括枪身组件500、枪管组件600和刀头700,枪身组件500和枪管组件600之间设置有旋转头300。
自适应模式的操作过程为:
先向后拉动旋转头300,当旋转头300后拉到位后,旋转头挡块310与拨叉齿234分离,再直接向刀头施加外力来控制刀头转动到需要的使用角度。
刀头采用自适应方式控制转向时,转向控制更加快捷直观,适用于外露皮肤切口的缝合。
本发明混合控制式吻合器的有益效果是:
手术过程中医生可以根据实际的切割需求选择自适应模式和/或精控模式来混合控制刀头转向,控制方式灵活,满足不同位置组织的吻合需求,增加了吻合器适用范围。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。
- 混合控制式吻合器
- 一种外翻式吻合器钉仓结构及吻合器