一种雷达相干性预测方法及装置
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及合成孔径雷达干涉技术领域,特别是涉及一种雷达相干性预测方法及装置。
背景技术
合成孔径雷达干涉技术(InSAR)是一种高空间分辨率、高精度的大地测量技术。在过去几十年里,它已经成功地应用于测量许多地球物理现象,包括地震、火山和其他地质活动。对于获取大面积的地表变形,InSAR通常在相干性好的区域工作良好。
然而,目前一般都需要先处理大量的雷达干涉图,然后从干涉图中判断相干性指标,从而决定区域是否适合开展InSAR。一方面,这需要预先预定大量的数据,使得生产成本大大增加。另一方面,很多区域暂时没有存档的雷达影像,所以无法通过InSAR处理获取相干性。
发明内容
基于此,本发明的目的在于,提供一种雷达相干性预测方法及装置,通过建立雷达相干性与NDVI之间的预测模型,通过现存的全球NDVI数据就能够直接预测待检测区域的雷达相干性,其具有节省InSAR数据成本、提高效率以及降低GPS监测成本的优点。
为了实现上述目的,本发明的第一方面是提供一种雷达相干性预测方法,包括:
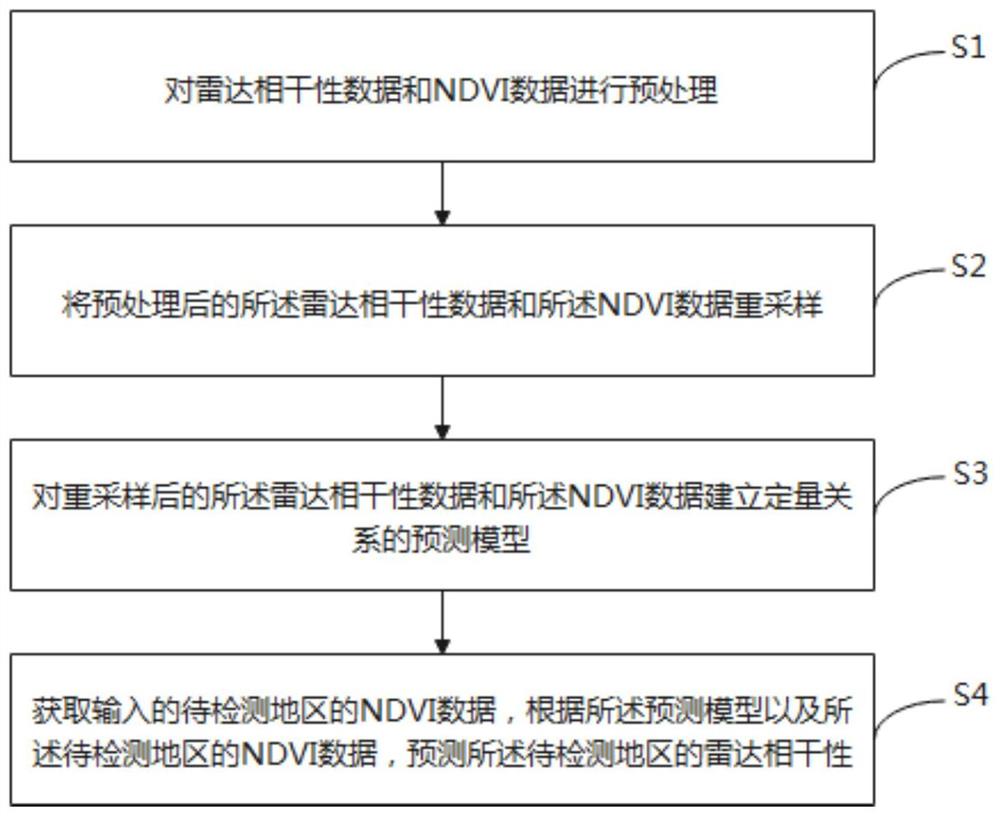
对雷达相干性数据和NDVI数据进行预处理;
将预处理后的所述雷达相干性数据和所述NDVI数据重采样;
对重采样后的所述雷达相干性数据和所述NDVI数据建立定量关系的预测模型;
获取输入的待检测地区的NDVI数据,根据所述预测模型以及所述待检测地区的NDVI数据,预测所述待检测地区的雷达相干性。
进一步地,所述对雷达相干性数据和NDVI数据进行预处理的步骤,具体包括以下步骤:
将所述雷达相干性数据和所述NDVI数据投影转换到同一坐标系下;
将所述同一坐标系下的所述雷达相干性数据和所述NDVI数据进行裁剪,获取同一目标区域的雷达相干性数据和NDVI数据;
去除目标区域的所述雷达相干性数据和所述NDVI数据的水、云层及雪地区域。
进一步地,所述去除目标区域的所述雷达相干性数据和所述NDVI数据的水、云层及雪地区域的步骤,具体包括以下步骤:
获取卫星图像,从所述卫星图像中确定目标区域;
对卫星图像中的所述目标区域进行水体掩膜,获得水体文件;
将所述水体文件裁剪成与目标区域的所述NDVI数据以及所述雷达相干性数据相同大小的区域;在裁剪后的水体文件中查找灰度值为1的区域,并在所述雷达相干性数据中获得对应的所述区域,且在所述雷达相干性数据中将所述区域所在的灰度值设为空值,其中,水体文件为一张地理编码的二值图像,有水的区域灰度值为1,无水区域为0;
将云层和雪地区域的所述NDVI数据对应的所述雷达相干性数据的灰度值设为空值;其中,云层和雪地区域的NDVI数据灰度值为负值。水、云层和雪地区域的雷达相干性差,在进行数据采集时要将其雷达相干性数据剔除掉,从而保证数据采集的有效。
进一步地,所述同一坐标系为WGS84坐标系。将雷达坐标系下的雷达相干性数据投影转换到与NDVI数据相同的坐标系WGS84下,保证雷达相干性数据和所述NDVI数据一一对应。
进一步地,所述对重采样后的所述雷达相干性数据和所述NDVI数据建立定量关系的预测模型的步骤,具体包括以下步骤:
利用线性模型及幂函数模型对重采样后的所述雷达相干性数据和所述NDVI数据进行回归,采用最小二乘法得到不同月份的所述线性模型和所述幂函数模型的模型参数,利用F检验对所述模型参数进行评估;
将符合F检验显著性的方程中的所述模型参数进行平均得到线性预测模型及幂函数预测模型,通过所述线性预测模型及所述幂函数预测模型对雷达相干性进行预测,比较所述线性预测模型及所述幂函数预测模型的预测精度,将预测精度最高的模型确定为最终的预测模型。对重采样后的所述雷达相干性数据和所述NDVI数据建立线性模型和幂函数模型,确定所述雷达相干性数据和所述NDVI数据的定量关系。
本发明的第二方面提供一种雷达相干性预测装置,包括:
预处理单元,用于对雷达相干性数据和NDVI数据进行预处理;
重采样单元,用于将预处理后的所述雷达相干性数据和所述NDVI数据重采样;
模型建立单元,用于对重采样后的所述雷达相干性数据和所述NDVI数据建立定量关系的预测模型;
预测单元,用于获取输入的待检测地区的NDVI数据,根据所述预测模型以及所述待检测地区的NDVI数据,预测所述待检测地区的雷达相干性。
与现有技术相比,本发明的有益效果如下:
1、通过建立雷达相干性和NDVI之间定量关系的预测模型,不需要预先处理InSAR干涉图就能预测雷达相干性,节省了InSAR数据成本;
2、通过建立雷达相干性和NDVI之间定量关系的预测模型预测雷达相干性,为雷达影像对的选择提供依据,减少了相干性差的雷达影像的处理,提高了效率;
3、预测得到雷达相干性可以为GPS点位布设提供数据参考,若雷达相干性低于雷达干涉技术可测量的阈值,则多布设GPS点,若雷达相干性高于雷达干涉技术可测量的阈值则少布设GPS点,使GPS技术能够更高效的用于形变监测,大大降低了监测成本。
附图说明
图1为本发明雷达相干性预测方法的流程示意图;
图2为本发明雷达相干性预测方法中S1的流程示意图;
图3为本发明雷达相干性预测方法S13的流程示意图;
图4为本发明雷达相干性预测方法S3的流程示意图;
图5为本发明雷达相干性预测装置的结构框图;
图6为本发明雷达相干性预测装置中预处理单元51的结构框图;
图7为本发明雷达相干性预测装置中去除单元513的结构框图;
图8为本发明雷达相干性预测装置中模型建立单元53的结构框图。
具体实施方式
为了更好地理解和实施,下面结合附图详细说明本发明。
请参阅图1,本发明实施例提供一种雷达相干性预测方法,包括的步骤如下:
S1.对雷达相干性数据和NDVI数据进行预处理。
在本申请实施例中,所述雷达相干性数据是通过下载雷达影像并通过ISCE软件计算得到,所述NDVI数据从中国科学院资源与环境科学数据中心(http://www.resdc.cn)获得。其中,雷达相干性是指雷达影像的干涉相干性,雷达向目标区域发射微波,然后接收目标反射的回波,得到同一目标区域成像的合成孔径雷达(SAR)复图像对,若复图像对之间存在相干条件,SAR复图像对共轭相乘可以得到干涉图,根据干涉图的相位值,得出两次成像中微波的路程差,从而计算出目标地区的地形、地貌以及表面的微小变化,可用于数字高程模型建立、地壳形变探测等。NDVI(Normalized Difference Vegetation Index)是归一化植被指数,表示为近红外波段的反射值NIR与红光波段的反射值R之差比上两者之和,用公式表示为:NDVI=(NIR-R)/(NIR+R),应用于检测植被生长状态、植被覆盖度和消除部分辐射误差等。上述获取的所述雷达相干性数据以及所述NDVI数据,需要进行预处理。
在一个可选的实施例中,请参阅图2,步骤S1还包括S11~S13,具体如下:
S11.将所述雷达相干性数据和所述NDVI数据投影转换到同一坐标系下。
所述计算得到的雷达相干性数据是雷达坐标系下的,需要投影转换到WGS84坐标系下,经过地理编码即可得到。具体地,所述雷达坐标系是极坐标系,可用斜距,方位角和仰角来表示,所述WGS84坐标系为地心坐标系,用相互垂直的X,Y,Z三个轴来表示表示,所述地理编码就是将极坐标系转化为地心坐标系。投影转换后的所述雷达相干性数据和所述NDVI数据都处于同一坐标系WGS84坐标系下。
S12.将所述同一坐标系下的所述雷达相干性数据和所述NDVI数据进行裁剪,获取同一目标区域的雷达相干性数据和NDVI数据。
对于原始数据即同一坐标系下的所述雷达相干性数据和所述NDVI数据,选择一个兴趣范围面数据即一个目标区域的所述雷达相干性数据和所述NDVI数据进行裁剪,将裁剪后的所述同一目标区域的雷达相干性数据和NDVI数据保存,供后续使用。
S13.去除目标区域的所述雷达相干性数据和所述NDVI数据的水、云层及雪地区域。
对于水、云层以及雪地区域,所述雷达相干性差,需要对目标区域的水、云层及雪地区域的所述雷达相干性数据和所述NDVI数据进行去除。
在一个可选的实施例中,请参阅图3,步骤S13还包括S131~S134,具体如下:
S131.获取卫星图像,从所述卫星图像中确定目标区域。
在本申请实施例中,利用谷歌地球(Google earth)获取卫星图像。
S132.对卫星图像中的所述目标区域进行水体掩膜,获得水体文件。
S133.将所述水体文件裁剪成与目标区域的所述NDVI数据以及所述雷达相干性数据相同大小的区域;在裁剪后的水体文件中查找灰度值为1的区域,并在所述雷达相干性数据中获得对应的所述区域,且在所述雷达相干性数据中将所述区域所在的灰度值设为空值,其中,水体文件为一张地理编码的二值图像,有水的区域灰度值为1,无水区域为0。
在本申请实施例中,水体掩膜是基于ENVI(The Environment for VisualizingImages,完整的遥感图像处理平台)利用band math(波段运算)和绘制ROI(region ofinterest,感兴趣区域)得到,通过在ENVI上利用band math生成NDWI(NormalizedDifference Water Index,归一化水指数)图像,然后绘制ROI,点击Build Mask,选择需要水体掩膜的图像,点击options,选择Import ROIs,选择绘制的ROI,生成0-1二值图像。其中,有水的区域灰度值为1,无水区域为0。将对应灰度值为1的区域标识即有水的区域标识,将所述标识应用于所述雷达相干性数据,把所述标识对应的所述雷达相干性数据灰度值设为空值,从而去除目标区域内有水体的所述雷达相干性数据。
S134.将云层和雪地区域的所述NDVI数据对应的所述雷达相干性数据的灰度值设为空值;其中,云层和雪地区域的NDVI数据灰度值为负值。
对于云层和雪地区域,所述NDVI数据为负值,将所述NDVI数据为负值对应的所述雷达相干性数据的灰度值为空值,从而去除水、云层和雪地区域的所述雷达相干性数据。
S2.将预处理后的所述雷达相干性数据和所述NDVI数据重采样。
重采样是从高分辨率雷达影像中提取出低分辨率影像的过程,数据重采样涉及的算法常有最邻近内插法、双线性内插法和三次卷积法内插。
S3.对重采样后的所述雷达相干性数据和所述NDVI数据建立定量关系的预测模型。
在本申请实施例中,重采样后的所述雷达相干性数据和所述NDVI数据建立定量关系的预测模型有线性模型和幂函数模型。
对于线性模型,方程通常可以表示为:
其中,
对于幂函数模型,方程通常可以表示为:
其中,
在一个可选的实施例中,请参阅图4,步骤S3还包括S31~S32,具体如下:
S31.利用线性模型及幂函数模型对重采样后的所述雷达相干性数据和所述NDVI数据进行回归,采用最小二乘法得到不同月份的所述线性模型和所述幂函数模型的模型参数,利用F检验对所述模型参数进行评估。
在本申请实施例中,基于最小二乘法得到不同月份的所述线性模型和所述幂函数模型的模型参数。具体地,对于线性模型,参数a和b的求解公式为:
其中,γ
具体地,对于幂函数模型,使用MATLAB中的nlinfit函数进行非线性拟合求解参数c、d以及k,所述非线性拟合命令为:[beta,r,J]=nlinfit(NDVI,,fun,beta0),其中,NDVI和γ表示重采样后所述NDVI数据及对应的所述雷达相干性数据,fun为所述幂函数模型定义的函数,beta0是函数中参数c、d以及k的初始值,将三组重采样后所述NDVI数据及对应的所述雷达相干性数据代入到幂函数模型定义的函数,解一个含有三个参数c、d以及k的方程组,从而确定c、d以及k的初始值。beta为参数c、d以及k的拟合值,r是各点处的拟合残差,J为雅克比矩阵的数值。
F检验(F-test),最常用的别名叫做联合假设检验,此外也称方差比率检验、方差齐性检验。它是一种在零假设之下,统计值服从F-分布的检验。其通常是用来分析用了超过一个参数的统计模型,以判断该模型中的全部或一部分参数是否适合用来估计母体。
在本申请的实施例中,以线性模型的方程为例,F检验的过程为:
(1)为了判断γ和NDVI之间是否存在线性关系,只需检验假设H
(2)计算统计值F值,公式为:
(3)给出显著性水平α,查自由度为(1,n-2)的F分布临界值表,得到临界值F
S32.将符合F检验显著性的方程中的所述模型参数进行平均得到线性预测模型及幂函数预测模型,通过所述线性预测模型及所述幂函数预测模型对雷达相干性进行预测,比较所述线性预测模型及所述幂函数预测模型的预测精度,将预测精度最高的模型确定为最终的预测模型。
在本申请实施例中,利用每个月的NDVI数据与雷达相干性数据得到12组模型参数,线性预测模型获得的模型参数基本稳定,截距a在[0.53 0.63]之间,斜率b在[-0.32 -0.23]之间。幂函数模型同时显示稳定的系数,系数c介于[4.04 4.42],d介于[-0.03 -0.04],k介于[-3.74 -4.09]之间。因此,NDVI数据和雷达相干性数据之间的函数关系在季节中变化比较小,将12个月求得的参数a、b和c进行平均得到的线性模型以及将12个月求得的参数c、d和k进行平均得到的幂函数模型更可靠,最后利用平均之后的线性模型和幂函数模型作为NDVI与雷达相干性的函数模型。
将求解得到的线性模型和幂函数模型,预测同一目标区域的雷达相干性。将所述雷达相干性与真实的雷达相干性数据计算方差,比较预测精度,方差小的,精度高。将所述线性模型和幂函数模型中精度高的模型作为最终的预测模型。
S4.获取输入的待检测地区的NDVI数据,根据所述预测模型以及所述待检测地区的NDVI数据,预测所述待检测地区的雷达相干性。
在本申请实施例中,要预测待检测地区的雷达相干性,只需将待检测地区的NDVI数据输入到预测模型中进行计算即可。
应用本发明实施例,通过对雷达相干性数据和NDVI数据进行预处理,将预处理后的所述雷达相干性数据和所述NDVI数据重采样,对重采样后的所述雷达相干性数据和所述NDVI数据建立定量关系的预测模型,获取输入的待检测地区的NDVI数据,根据所述预测模型以及所述待检测地区的NDVI数据,预测所述待检测地区的雷达相干性,本发明根据现存的全球NDVI数据就能够直接预测待检测区域的雷达相干性,节省InSAR数据成本、提高效率以及降低GPS监测成本。
相应于上述方法实施例,请参阅图5,本发明的第二方面提供一种雷达相干性预测装置5,包括:
预处理单元51,用于对雷达相干性数据和NDVI数据进行预处理。
重采样单元52,用于将预处理后的所述雷达相干性数据和所述NDVI数据重采样。
模型建立单元53,用于对重采样后的所述雷达相干性数据和所述NDVI数据建立定量关系的预测模型。
预测单元54,用于获取输入的待检测地区的NDVI数据,根据所述预测模型以及所述待检测地区的NDVI数据,预测所述待检测地区的雷达相干性。
可选的,请参阅图6,预处理单元51包括:
转换单元511,用于将所述雷达相干性数据和所述NDVI数据投影转换到同一坐标系下。
裁剪单元512,用于将所述同一坐标系下的所述雷达相干性数据和所述NDVI数据进行裁剪。
去除单元513,用于去除目标区域的所述雷达相干性数据和所述NDVI数据的水、云层及雪地区域。
可选的,请参阅图7,去除单元513包括:
获取单元5131,用于获取卫星图像,从所述卫星图像中确定目标区域。
水体掩膜单元5132,用于对卫星图像中的所述目标区域进行水体掩膜,获得水体文件。
裁剪和查找单元5133,用于将所述水体文件裁剪成与目标区域的所述NDVI数据以及所述雷达相干性数据相同大小的区域;在裁剪后的水体文件中查找灰度值为1的区域,并在所述雷达相干性数据中获得对应的所述区域,且在所述雷达相干性数据中将所述区域所在的灰度值设为空值,其中,水体文件为一张地理编码的二值图像,有水的区域灰度值为1,无水区域为0。
设置单元5134,用于将云层和雪地区域的所述NDVI数据对应的所述雷达相干性数据的灰度值设为空值;其中,云层和雪地区域的NDVI数据灰度值为负值。
可选的,请参阅图8,模型建立单元53包括:
回归单531元,用于利用线性模型及幂函数模型对重采样后的所述雷达相干性数据和所述NDVI数据进行回归,采用最小二乘法得到不同月份的所述线性模型和所述幂函数模型的模型参数,利用F检验对所述模型参数进行评估。
比较单元532,用于将符合F检验显著性的方程中的所述模型参数进行平均得到线性预测模型及幂函数预测模型,通过所述线性预测模型及所述幂函数预测模型对雷达相干性进行预测,比较所述线性预测模型及所述幂函数预测模型的预测精度,将预测精度最高的模型确定为最终的预测模型。
应用本发明实施例,通过对雷达相干性数据和NDVI数据进行预处理,将预处理后的所述雷达相干性数据和所述NDVI数据重采样,对重采样后的所述雷达相干性数据和所述NDVI数据建立定量关系的预测模型,获取输入的待检测地区的NDVI数据,根据所述预测模型以及所述待检测地区的NDVI数据,预测所述待检测地区的雷达相干性,本发明根据现存的全球NDVI数据就能够直接预测待检测区域的雷达相干性,节省InSAR数据成本、提高效率以及降低GPS监测成本。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,则本发明也意图包含这些改动和变形。
- 一种雷达相干性预测方法及装置
- 一种基于雷达图的降水预测方法以及装置