一种氢燃料电池汽车电机相序自我识别系统及方法
文献发布时间:2023-06-19 11:47:31
技术领域
本发明涉及燃料电池汽车电机检测技术领域,具体涉及一种氢燃料电池汽车电机相序自我识别系统及方法。
背景技术
由于氢燃料电池汽车的普及,燃料电池空气压缩电机和驱动电机广泛的使用于氢燃料电池汽车上,但是,由于生产出错或者装配问题,容易出现电机相序反接或者电机三相线束相序反接的现象,当出现此类问题时,人工难以及时排查问题,造成生产或者车辆下线的延误,以及车辆故障的误判急需一种相序自我识别系统及方法来解决此类问题。
发明内容
本发明提供了一种氢燃料电池汽车电机相序自我识别系统,旨在解决电机相序反接难以排查、造成车辆故障的技术问题。
为了实现上述目的,本发明提供了一种氢燃料电池汽车电机相序自我识别系统,所述氢燃料电池汽车电机相序自我识别系统包括:氢燃料电池系统、高压配电箱,动力电池系统、后电机控制器、电机,减速器和差速器、整车控制器、制动踏板、油门踏板和仪表;
所述整车控制器通过信号采集线分别与所述制动踏板和所述油门踏板连接;
所述整车控制器、氢燃料电池系统、动力电池系统、后电机控制器、电机、仪表之间通过CAN通讯信号线连接;
所述高压配电箱通过高压线分别与所述氢燃料电池系统、动力电池系统、后电机控制器和电机连接;
整车控制器采集油门踏板和制动踏板的深度信息,根据驾驶员需求对电机进行控制,发送目标扭矩;
后电机控制器根据整车控制器发送的目标扭矩,进行目标扭矩输出,同时控制电机执行目标扭矩获得电机转速,整车控制器采集电机转速信息、电机相电流信息和后电机控制器的直流输入端电流信息;并根据所述电机转速信息、电机相电流和后电机控制器的直流输入端电流进行电机相序识别,并将相序识别结果发送至所述仪表进行显示。
优选地,所述氢燃料电池汽车电机相序自我识别系统还包括差速器和减速器,所述差速器通过齿轮安装于减速器内部。
优选地,所述后电机控制器与所述电机通过三相铜排连接。
优选地,所述电机与减速器、差速器通过齿轮轴套连接于燃料电池汽车后驱动轴上。
此外,为了实现上述目的,本发明还提供了一种氢燃料电池汽车电机相序自我识别方法,所述氢燃料电池汽车电机相序自我识别方法包括以下步骤:
S1、车辆完成驱动高压上电;
S2、当满足电机转速为0,且油门踏板和制动踏板的深度信息均>=50%且持续10s,则进入相序识别模式;
S3、仪表提示驾驶员深踩油门;
S4、整车控制器根据驾驶员需求发送第一目标扭矩;
S5、判断是否满足第一条件,若不满足,进入步骤S6;否则,进入步骤S7;
S6、判定电机处于相序匹配正确状态,仪表显示相序匹配正确,进入步骤S11;
S7、判定电机处于相序匹配错误状态,仪表显示相序匹配错误,同时电机控制器进入相序调整模式,交换UVW相序中的两相;
S8、仪表提示驾驶员深踩油门;
S9、整车控制器根据驾驶员需求发送第二目标扭矩;
S10、判断是否满足第二条件,若满足,则判定相序调整成功,仪表显示相序调整成功,并进入步骤S11;否则返回步骤S7;
S11、退出相序识别模式,结束流程。
优选地,所述第一条件为:第一目标扭矩持续增大至0.5Tmax,且电机转速检测状态一直为0,电机相电流随着第一目标扭矩的增大而持续增大,后电机控制器的直流输入端电流≤5A。
优选地,所述第二条件为:电机有扭矩输出且电机转速大于等于20rpm持续0.2s,或后电机控制器的直流输入端电流≥10A。
优选地,所述Tmax为电机峰值扭矩。
优选地,若连续多次相序调整未成功,则判定电驱系统损坏,仪表提示及时更换电驱系统。
本发明的有益效果:本发明提供一种氢燃料电池汽车电机相序自我识别系统及方法,该系统结构简单,成本较低,具有很高的稳定性和可靠性,同时适用面广泛,误判率低,控制可靠,还具有提示功能。
附图说明
图1是本发明一种氢燃料电池汽车电机相序自我识别系统的组成结构图;
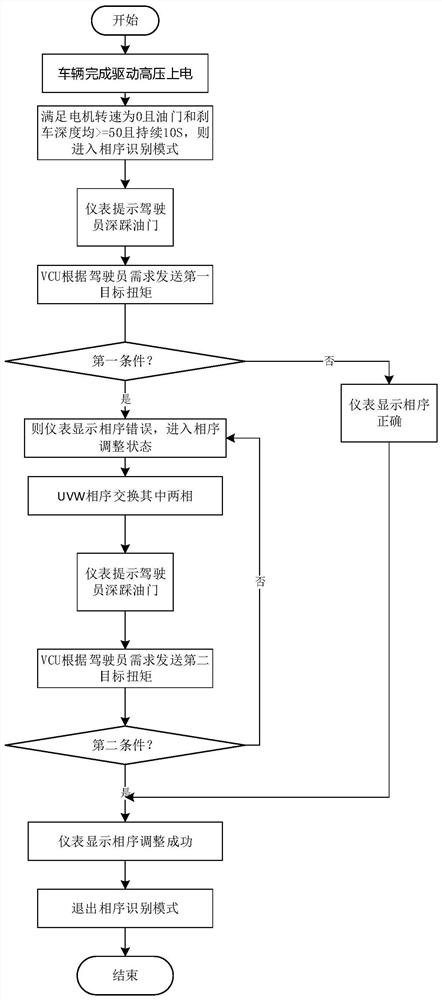
图2是本发明一种氢燃料电池汽车电机相序自我识别方法执行流程图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地描述。
请参考图1,图1是本发明一种氢燃料电池汽车电机相序自我识别系统的组成结构图;
本发明提供了一种氢燃料电池汽车电机相序自我识别系统,所述氢燃料电池汽车电机相序自我识别系统包括:后电机控制器、电机、整车控制器、制动踏板和油门踏板;
所述整车控制器通过信号采集线与所述制动踏板和所述油门踏板连接;
所述整车控制器、电机、后电机控制器之间通过CAN通讯信号线连接;
所述整车控制器采集所述油门踏板和所述制动踏板的深度信息,根据驾驶员需求对所述电机进行控制,发送目标扭矩;所述后电机控制器根据所述整车控制器发送的目标扭矩,进行目标扭矩输出,同时控制所述电机执行目标扭矩获得电机转速,所述整车控制器获取电机转速信息、电机相电流信息和后电机控制器的直流输入端电流信息,并根据所述电机转速信息、电机相电流信息和后电机控制器的直流输入端电流信息识别并调整电机相序。
本实施例中,所述氢燃料电池汽车电机相序自我识别系统还包括:燃料电池系统、动力电池系统;
所述燃料电池系统、动力电池系统、整车控制器之间通过CAN通讯信号线连接,所述燃料电池系统、动力电池系统为燃料电池氢能汽车的行驶提供动能。
本实施例中,所述氢燃料电池汽车电机相序自我识别系统还包括高压配电箱;所述高压配电箱通过高压线束分别与所述氢燃料电池系统、动力电池系统、后电机控制器、电机连接,高压配电箱将电能分配给后电机控制器和电机,后电机控制器通过电能驱动电机。
本实施例中,所述氢燃料电池汽车电机相序自我识别系统还包括差速器和减速器,所述差速器通过齿轮安装于减速器内部。
本实施例中,所述氢燃料电池汽车电机相序自我识别系统还包括显示屏,所述显示屏与所述整车控制器之间通过CAN通讯信号线连接。
本实施例中,所述后电机控制器与所述电机通过三相铜排连接。
本实施例中,所述电机与减速器、差速器通过齿轮轴套连接于燃料电池汽车后驱动轴上,电机产生的动能通过机械连接传递给减速器和差速器,最终动力传递给后驱动轴实现氢能汽车行驶功能。
请参考图2,基于上述的一种氢燃料电池汽车电机相序自我识别系统,本发明还提供了一种氢燃料电池汽车电机相序自我识别方法,包括以下步骤:
S1、车辆完成驱动高压上电;
S2、当满足电机转速为0,且油门踏板和制动车踏板的深度信息均>=50%且持续10s,则进入相序识别模式;
S3、仪表提示驾驶员深踩油门;
S4、整车控制器根据驾驶员需求发送第一目标扭矩;
S5、判断是否满足第一条件,若不满足,进入步骤S6;否则,进入步骤S7;
S6、判定电机处于相序匹配正确状态,仪表显示相序匹配正确,进入步骤S11;
S7、判定电机处于相序匹配错误状态,仪表显示相序匹配错误,同时后电机控制器进入相序调整模式,交换UVW相序中的两相;
S8、仪表提示驾驶员深踩油门;
S9、整车控制器根据驾驶员需求发送第二目标扭矩;
S10、判断是否满足第二条件,若满足,则判定相序调整成功,仪表显示相序调整成功,并进入步骤S11;否则返回步骤S7;
S11、退出相序识别模式,结束流程。
本实施例中,所述第一条件为:第一目标扭矩持续增大至0.5Tmax,且电机转速检测状态一直为0,电机相电流随着第一目标扭矩的增大而持续增大,后电机控制器的直流输入端电流≤5A。
所述第二条件为:电机有扭矩输出且电机转速大于等于20rpm持续0.2s,或后电机控制器的直流输入端电流≥10A。
其中,所述Tmax为电机峰值扭矩。
本实施例中,油门踏板和制定踏板的深度信息范围为0-100%,对应的数值为0-100。
本实施例中,若连续多次相序调整未成功,则判定电驱系统损坏,仪表提示及时更换电驱系统。
作为可选地实施方式,每次识别最多进行五次相序的调整,若循环3次,最多15次相序调整,若仍不成功,则可以判定电驱系统损坏,仪表提示及时更换电驱系统。
在本文中,所涉及的前、后、上、下等方位词是以附图中零部件位于图中以及零部件相互之间的位置来定义的,只是为了表达技术方案的清楚及方便。应当理解,所述方位词的使用不应限制本申请请求保护的范围。
在不冲突的情况下,本文中上述实施例及实施例中的特征可以相互结合。
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种氢燃料电池汽车电机相序自我识别系统及方法
- 一种自我标签学习的深度聚类图像识别系统及方法