采伐木材机器人
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及林业机械技术领域,特别涉及采伐木材机器人。
背景技术
无论是人民日常生活还是经济发展建设都离不开木材资源,工业用材林既保护了原有的自然生态不被破坏,又能够满足人类社会的木材需求。
目前,在木材采伐行业中,木材的采伐水平大多停留在手持式油锯或传统工具采伐,在各大林场中普遍存在劳动力紧缺和采伐工具原始落后的问题,不但增加了采伐成本,也难以达到规模化作业,而且传统工具在采伐作业中存在诸多安全隐患,通常人与树干是近距离接触,一旦判断树倒方向失误或风向等外力作用控制了树倒的方向,很容易发生人身伤亡事故。
发明内容
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种采伐木材机器人,适于在复杂山地采伐作业,能够远程遥控操作,安全可靠且效率高。
根据本发明实施例的采伐木材机器人,包括:车架;伐木装置,包括支架以及安装于所述支架上的活动卡爪和切割机构,所述活动卡爪可搂抱固定树干,所述切割机构位于所述活动卡爪的下方,所述切割机构用于切割树干;驱动装置,设置于所述车架的前端并与所述支架连接,所述驱动装置可驱动所述支架前后、升降及旋转运动。
至少具有如下有益效果:本机器人在采伐作业时,通过车架移动到树干附近,驱动装置带动伐木装置运动至树干处,考虑有些树干的生长倾斜角度,驱动装置通过支架合理地调节活动卡爪和切割机构的角度,采用活动卡爪搂抱固定树干并具有短距离向上托起的力量,再使用切割机构对树干的底部进行切割直至切断,然后运输到放置点,驱动装置再带动支架旋转一个角度,类似于低头动作,松开活动卡爪即可将树干往前方倾倒,整个过程安全可靠,而且效率非常高,在复杂的山地采伐树干可以采用人工远程遥控操作,在较平缓的山地而且树干直径差异不太大的情况下可以切换成自主工作模式,使用方便,适于进行规模化作业。
根据本发明的一些实施例,所述切割机构包括锯链、导板和传动链轮,所述传动链轮转动连接所述支架,所述锯链转动安装于所述传动链轮和所述导板的边缘导向槽上,所述导板可围绕所述传动链轮的中心左右摆动。
根据本发明的一些实施例,所述切割机构还包括安装在所述支架上的第一旋转马达和第二旋转马达,所述第一旋转马达的输出端与所述传动链轮连接,所述导板上安装有从动齿轮,所述第二旋转马达的输出端连接有主动齿轮,所述主动齿轮与所述从动齿轮相啮合,所述从动齿轮的中心轴与所述传动链轮的中心轴重合。
根据本发明的一些实施例,所述支架在所述导板的左右两侧均安装有隔离罩。
根据本发明的一些实施例,所述活动卡爪沿上下布置有至少两对,每对所述活动卡爪左右分布,左右两侧中同一侧的所述活动卡爪共同连接一旋转立柱,所述旋转立柱连接有动力件,所述动力件为所述旋转立柱提供旋转动力。
根据本发明的一些实施例,所述动力件为第一驱动缸,所述动力件通过吊耳连接所述旋转立柱。
根据本发明的一些实施例,每对所述活动卡爪的相向一侧上分布有若干咬合齿。
根据本发明的一些实施例,所述驱动装置包括第一连杆、第二连杆、第三连杆、第二驱动缸和第三驱动缸,所述支架、所述第一连杆、所述第二连杆和所述第三连杆依次构成平行四边形机构,所述第一连杆的前端与所述支架的下端铰接,后端与所述第二连杆的下端共同铰接于所述车架的前端,所述第二连杆的上端与所述第三连杆的后端铰接于第一铰接轴,所述第二驱动缸的前端与所述第一铰接轴铰接,后端与所述车架铰接,所述第三驱动缸的前端直接或间接铰接所述第一连杆,后端与所述车架铰接。
根据本发明的一些实施例,所述第一连杆通过摆杆铰接所述第三驱动缸的前端,所述车架的前端可旋转地安装有第二铰接轴,所述第二连杆的下端与所述第二铰接轴铰接,所述第一连杆的后端、所述摆杆与第二铰接轴固定连接。
根据本发明的一些实施例,所述车架的下部两侧对称安装有履带行走系统,所述履带行走系统用于为所述车架提供行走动力。
附图说明
本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
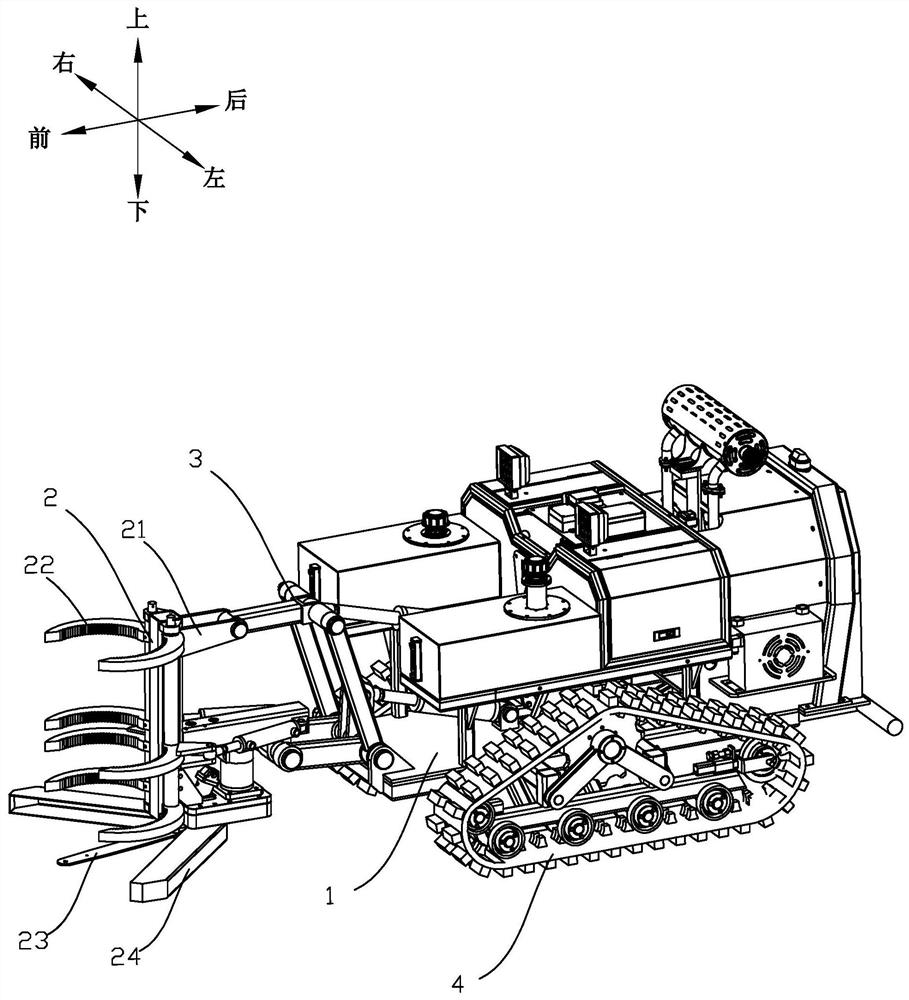
图1为本发明实施例的结构示意图;
图2为本发明实施例的部分结构示意图;
图3为本发明实施例中伐木装置的结构示意图;
图4为本发明实施例中伐木装置的部分结构示意图。
附图标记:车架1、伐木装置2、支架21、活动卡爪22、咬合齿221、切割机构23、导板231、传动链轮232、第一旋转马达233、第二旋转马达234、从动齿轮235、主动齿轮236、隔离罩24、旋转立柱25、动力件26、吊耳27、驱动装置3、第一连杆31、第二连杆32、第三连杆33、第二驱动缸34、第三驱动缸35、第一铰接轴36、摆杆37、第二铰接轴38、履带行走系统4。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个及两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二、第三只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
参照图1,本发明公开一种采伐木材机器人,包括车架1、伐木装置2和驱动装置3。
其中,伐木装置2包括支架21以及安装于支架21上的活动卡爪22和切割机构23,活动卡爪22可搂抱固定树干,起到支撑树干、防止倾倒的作用,切割机构23位于活动卡爪22的下方,切割机构23用于切割树干,使得树干与树根相分离。
驱动装置3设置于车架1的前端并与支架21连接,驱动装置3可驱动支架21前后、升降及旋转运动。
本机器人在采伐作业时,通过车架1移动到树干附近,驱动装置3带动伐木装置2运动至树干处,考虑有些树干的生长倾斜角度,驱动装置3通过支架21合理地调节活动卡爪22和切割机构23的角度,采用活动卡爪22搂抱固定树干并具有短距离向上托起的力量,再使用切割机构23对树干的底部进行切割直至切断,然后运输到放置点,驱动装置3再带动支架21旋转一个角度,类似于低头动作,松开活动卡爪22即可将树干往前方倾倒,整个过程安全可靠,而且效率非常高。
在复杂的山地采伐树干可以采用人工远程遥控操作,在较平缓的山地而且树干直径差异不太大的情况下可以切换成自主工作模式,使用方便,适于进行规模化采伐作业。
进一步参照图3和图4,在本发明的一些实施例中,切割机构23包括锯链、导板231和传动链轮232,传动链轮232转动连接支架21,锯链转动安装于传动链轮232和导板231的边缘导向槽上,能够做切割树干的运动,导板231可围绕传动链轮232的中心左右摆动,使得锯链还能够横向移动以锯断树干,为了防止夹锯,活动卡爪22还可以在搂抱固定树干时施加短距离向上托起树干的作用力。
此外,切割机构23还包括安装在支架21上的第一旋转马达233和第二旋转马达234,第一旋转马达233的输出端与传动链轮232连接,进而带动锯链转动切割,导板231上安装有从动齿轮235,第二旋转马达235的输出端连接有主动齿轮236,主动齿轮236与从动齿轮235相啮合,使得第二旋转马达234能够带动导板231和锯链摆动,其中,由于从动齿轮235的中心轴与传动链轮232的中心轴重合,导板231可围绕传动链轮232的中心左右摆动,可以保证传动链轮232的旋转动作和摆动动作不冲突。
在本发明的一些实施例中,参照图3,为了防止锯链与外来物碰撞损坏,或者误伤操作人员,支架21在导板231的左右两侧均安装有隔离罩24,导板231和锯链可以收纳于任一侧的隔离罩24内。
参照图3,在本发明的一些实施例中,为了增加对树干的搂抱强度和对锯断后的树干支撑力度,活动卡爪22沿上下布置有至少两对,每对活动卡爪22左右分布,左右两侧中同一侧的活动卡爪22共同连接一旋转立柱25,旋转立柱25连接有动力件26,动力件26为旋转立柱25提供旋转动力,其中,动力件26可以是第一驱动缸,具体是液压油缸,动力件26通过吊耳27连接旋转立柱25,两个动力件26同步驱动左右两侧的活动卡爪22,达到搂抱的作用。
此外,每对活动卡爪22的相向一侧上分布有若干咬合齿221,咬合齿221能够辅助咬合树干,增加摩擦作用,防止打滑,辅助支撑树干的重量。
参照图2,在本发明的一些实施例中,驱动装置3包括第一连杆31、第二连杆32、第三连杆33、第二驱动缸34和第三驱动缸35,其中,支架21、第一连杆31、第二连杆32和第三连杆33依次构成平行四边形机构。
具体地,第一连杆31的前端与支架21的下端铰接,后端与第二连杆32的下端共同铰接于车架1的前端,第二连杆32的上端与第三连杆33的后端铰接于第一铰接轴36,第二驱动缸34的前端与第一铰接轴36铰接,后端与车架1铰接,第三驱动缸35的前端直接或间接铰接第一连杆31,后端与车架1铰接,其中,第二驱动缸34和第三驱动缸35可以选用液压油缸。
考虑到如果采用第三驱动缸35直连第一连杆31,可能导致第三驱动缸35与其它部件产生干涉,在本发明的一些实施例中,参照图2,第一连杆31通过摆杆37铰接第三驱动缸35的前端,其中,车架1的前端可旋转地安装有第二铰接轴38,第二连杆32的下端与第二铰接轴38铰接,第一连杆31的后端、摆杆37与第二铰接轴38固定连接。
如图2所示,可以理解的是,第二驱动缸34能够带动第二连杆32围绕第二铰接轴38转动,第三驱动缸35能够带动第一连杆31围绕第二铰接轴38转动。
根据平行四边形原理,当第二驱动缸34保持静止状态,而第三驱动缸35带动第一连杆31围绕第二铰接轴38转动时,由于第二连杆32保持不动,支架21仅做前后及升降运动,而不会翻转,即相当于伐木装置2做靠近或远离树干的平移动作,但是相对树干的角度保持不变;当第三驱动缸35保持静止状态,而第二驱动缸34带动第二连杆32围绕第二铰接轴38转动时,由于第一连杆31保持不动,支架21不仅做前后及升降运动,还会做翻转运动;当同时伸缩第二驱动缸34和第三驱动缸35时,可将伐木装置2伸出车架1外或者收回至车架1内。
在实际的采伐作业时,往往先将伐木装置2伸出车架1外,然后通过伸缩第二驱动缸34以翻转支架21,调整好伐木装置2的姿态,通常将活动卡爪22、导板231和锯链调节至水平状态,以匹配竖直状态的树干,然后再伸缩第三驱动缸35实现靠近或远离树干的动作。而针对一些倾斜的树干,只需微调第二驱动缸34便可达到角度适配的状态,设计巧妙,调节非常方便。
参照图1,在本发明的一些实施例中,车架1的下部两侧对称安装有履带行走系统4,履带行走系统4用于为车架1提供行走动力,最大爬坡角度可达42°,再搭配大功率发动机,动力强劲,机动灵活,而且越野能力强,是山地林木采伐的理想产品。
上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
- 采伐木材机器人
- 用于联合采伐头采伐木材测量的方法及设备