一种六足软体机器人的结构装置
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及一种六足软体机器人的结构装置,属于特殊地形运输设备领域。
背景技术
随着科技技术的发展,机器人广泛运用于医疗服务、工业生产、救援勘察、货物运输等多种领域。从使用的基础材料来看,现在的机器人可以分成刚体机器人和软体机器人两大类。大多数刚体机器人是由刚性材料制成的,输出力量大、速度快和精度高,但刚体机器人的结构复杂、体积大、灵活性差,这限制了刚性机器人在动态、未知、非结构化的复杂环境领域的应用,从而限制了其使用领域。从而越来越多的研究人员向软体机器人这一方向进行研究发展,近几年在软体机器人的领域中也取得了不错的成绩。
近年来,工业制造自动化的发展飞快,机器人在各个领域的需求增加,同时要求也有相应的提高, 相较于传统机器人,软体机器人采用柔软、具有弹性的材料制作,可以有更好的自由度,人机交互性,以及环境适应能力,能够在动态的,非结构化的环境中应用,同时也可以满足高精度工厂对工件损伤的最小化。在科技飞速发展的今天,对软体机器人的研究将成为智能制造领域的一种新趋势。
在特殊地形运输设备领域内,刚体机器人很难在一些特殊地形进行作业,技术人员很难对其进行操作控制。并且对刚体机器人的损耗也很大,需要经常更换部位零件,成本较高。软体机器人由于其使用的基础材料为柔性材料,可以很好的适应地形的变化、可操作空间大、成本低等优势,是一个不错的选择。
发明内容
本发明的目的在于提供一种成本低廉、使用方便、容易制作、组装的六足软体机器人的结构装置。实现在特殊地形进行物体的运输,图像传输等功能。
本发明为了实现上述目的,采用如下技术方案:
一种六足软体机器人的结构装置,它包括驱动控制模块、执行模块、载体模块和连接模块;
所述的驱动控制模块包括气源控制端、气泵和控制组件;
所述连接模块包括若干根气管和分流器,分流器用于若干根气管之间的连接,连接模块用于进行气体的传输,并且通过连接模块与控制模块、执行模块、载体模块之间的连接;
气源控制端连接着气泵用于提供中断驱动气体,控制组件安装在连接模块中的气管上;
所述执行模块它包括六只独立的软体足;每个软体足里设有多个通孔的腔室结构;六只独立的软体足与载体模块和连接模块连接;
所述载体模块包括载体平台和摄像头,摄像头设置在载体平台的前端;
进一步的,载体平台上面有与执行模块配合的位置孔和与运输载体配合的位置孔。
进一步的,控制组件通过两位三通电磁阀对若干根气管进行单独控制气体的通断以及排气。
进一步的,六只独立的软体足由若干根气管一一对应让其软体足内空腔充气膨胀达到弯曲效果,排出气体恢复直立状态。
所述的气泵为气体发生装置,为装置提供了驱动气体。气源控制端控制着气泵电流的通断,气泵通电工作时,压缩空气对装置进行气体供给。
所述的执行模块包括六足独立的软体足,软体足内设有多个相通的气腔,六个独立的软体足依次规律的排列并且连接在载体模块指定的位置处。
六个独立的气管为六个独立的软体足供断气体,充气时候软体足的内部空腔膨胀使得软体足弯曲,排气时内部空腔回到原有状态,软体足重新回到直立状态。通过每个软体足之间有规律的弯曲直立,使得结构装置能进行规律运动。
载体模块包含有载体平台和摄像头,摄像头安装在载体平台的前端, 将载体平台上的摄像头打开用于接收画面。将运你们那输的目标物体放置固定于载体平台上,软体机器人的运动带动目标物体的移动,实现物体的运输。
本发明的有益效果:
本发明在工作过程中对所运载的目标物体有着缓冲的保护作用;因为执行模块为六个独立的软体足,软体足底部能够有一定量的形变,能够适合特定的地形,可以在特定的地形里进行作业;整个结构装置主要以气动为驱动方式,提高了操作者在操作本结构装置时的安全性;该结构装置还具有成本低、结构简单合理、组装简易的特点,能够便于携带,可以节省工作前所需要的人力、物力以及时间。该结构装置若可以进行进一步的推广和应用,将在特殊场景物体运输领域里有着很大的收益。
附图说明
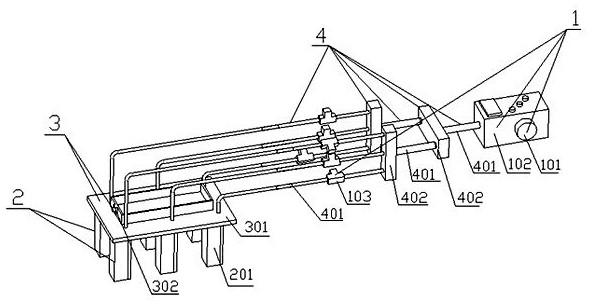
图1为本发明的结构示意图;
图2为本发明的执行模块中软体足立面的结构示意图;
图3为本发明的执行模块中软体足充气弯曲状态时的示意图;
图4为本发明的载体模块中的立面结构示意图;
图5为本发明的载体模块中的俯视角度结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1至图5,本发明实施例中:
一种六足软体机器人的结构装置,它包括驱动控制模块1、执行模块2、载体模块3和连接模块4;
所述的驱动控制模块1包括气源控制端101、气泵102和控制组件103;
所述连接模块4包括若干根气管401和分流器402,分流器402用于若干根气管401之间的连接,连接模块4用于进行气体的传输,并且通过连接模块4与控制模块1、执行模块2、载体模块3之间的连接;
气源控制端101连接着气泵102用于提供中断驱动气体,控制组件103安装在连接模块4中的气管401上;
所述执行模块2它包括六只独立的软体足201;每个软体足201里设有多个通孔的腔室结构;六只独立的软体足201与载体模块3和连接模块4连接;
所述载体模块3包括载体平台301和摄像头302,摄像头302设置在载体平台301的前端;
进一步的,载体平台301上面有与执行模块2配合的位置孔和与运输载体配合的位置孔。
进一步的,控制组件103通过两位三通电磁阀对若干根气管401进行单独控制气体的通断以及排气。
进一步的,六只独立的软体足201由若干根气管401一一对应让其软体足201内空腔充气膨胀达到弯曲效果,排出气体恢复直立状态。
所述的气泵为气体发生装置,为装置提供了驱动气体。气源控制端控制着气泵电流的通断,气泵通电工作时,压缩空气对装置进行气体供给。
所述的执行模块包括六足独立的软体足,软体足内设有多个相通的气腔,六个独立的软体足依次规律的排列并且连接在载体模块指定的位置处。
六个独立的气管为六个独立的软体足供断气体,充气时候软体足的内部空腔膨胀使得软体足弯曲,排气时内部空腔回到原有状态,软体足重新回到直立状态。通过每个软体足之间有规律的弯曲直立,使得结构装置能进行规律运动。
载体模块包含有载体平台和摄像头,摄像头安装在载体平台的前端, 将载体平台上的摄像头打开用于接收画面。将运你们那输的目标物体放置固定于载体平台上,软体机器人的运动带动目标物体的移动,实现物体的运输。
执行模块2和载体模块3之间通过螺栓连接以及胶合连接作为整个结构装置的主要机体。其中载体模块3上安装有可以更换不同尺寸大小的载体平台301、一个小型的高清摄像头302。执行模块2中的六只独立软体足201规律排序和安装在载体301底部。
连接模块4中的气管401为气体的输送载体,执行模块2和载体模块3构成的机体通过气管401与驱动控制模块1连接,组成完整的装置结构。其中每个模块与气管401相连接口处通过密封圈、密封胶等密封材料进行密封。每次工作前,将接口处放入水中检查气密性,达到无气泡产生标准后可以进行工作。
气泵102通电压缩空气为结构装置供给气体,通过连接模块4中若干的气管401传输驱动气体。通过控制面板控制两位三通电磁阀对每个独立的软体足201进行规律的充气排气,使六个独立的软体足201各自发生有规律的形变并且之间相互配合让装置实现运动。
驱动控制模块控制继电器模块、电磁阀。来实现充气的时序达到充气实现腿部的弯曲的目的。其中充气的时序控制着腿部运动的顺序;充气的时间控制着软体足形变的角度,充气越多,形变角度越大,步伐越大。
软体足201内部空腔充气膨胀,多个空腔膨胀,让软体足201实现向壁厚的那一向弯曲。空腔排气后软体足201回复初始直立状态。
结构装置在工作时,通过对独立软体足201规律的充气与排气, 达到软体足201规律的在弯曲和直立两种状态里变化,六个独立的软体足201之间相互配合,使得整个结构装置进行运动,带动目标物体的移动,实现物体的运输。
一种六足软体机器人的结构装置的使用方法为:
首先,将每个连接处进行密封处理防止结构装置工作时气体泄漏。其次气源控制端使气泵通电压缩空气为结构装置供给气体,随后输出气管经过分流器分为六根独立的输出气管,并且经过控制组件两位三通电磁阀再与六个独立的软体足连接。
再次,通过控制两位三通电磁阀对每个独立的软体足的充气、排气进行控制,来达到软体足的弯曲和直立的目的,并且通过对两位三通电磁阀的有规律控制来使软体足能有规律的弯曲直立。六根独立软体足之间的配合从而达到结构装置的运动。
最后将运输的目标物体放置固定于载体平台上,通过结构装置的运动带动目标物体移动,实现物体运输。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种六足软体机器人的结构装置
- 一种带双六足推进器和双三足支撑器的全自动TBM掘进装置