一种快速全自动无心磨送料机
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及研磨设备技术领域,尤其涉及一种快速全自动无心磨送料机。
背景技术
无心磨也叫无心磨削,是磨削加工的一种;无心磨砂轮是安装在无心磨床上使用的一款砂轮,它与拖链、抓料机构相互作用,组成的一种磨削方式,被加工的工件经抓料机构抓紧悬挂,由拖链带动抓料机构向无心磨方向移动而旋转机构带动工件旋转时由无心砂轮磨削。目前工作人员在进行工件的磨削时,产生大量的废屑,需要花费大量人力清理废屑,浪费人力资源。
发明内容
本发明的目的在于提供一种快速全自动无心磨送料机,旨在解决现有技术中的工作人员在进行工件的磨削时,产生大量的废屑,需要花费大量人力清理废屑,浪费人力资源的技术问题。
为实现上述目的,本发明采用的一种快速全自动无心磨送料机,包括操作台、研磨板、收集盒、控制组件、研磨轮、挡框、移动组件和刮杆,所述操作台上具有槽体,所述收集盒与所述操作台滑动连接,并位于所述槽体内,所述研磨板与所述操作台固定连接,并位于所述收集盒的上方,所述控制组件与所述操作台固定连接,所述研磨轮与所述控制组件固定连接,并位于所述研磨板的上方,所述挡框与所述控制组件固定连接,所述移动组件与所述操作台固定连接,并位于所述操作台的上方,所述刮杆的一端与所述移动组件固定连接,并与所述研磨板贴合。
其中,所述移动组件包括电动丝杆和套筒,所述电动丝杆与所述操作台固定连接,并位于所述操作台的上方,所述套筒与所述电动丝杆的输出端固定连接,所述刮杆的一端与所述套筒固定连接,并位于所述套筒的外侧壁。
其中,所述控制组件包括控制器和机械手本体,所述控制器与所述操作台固定连接,并位于所述操作台的外侧壁,所述控制器与所述机械手本体电性连接,所述机械手本体的一端与所述操作台固定连接,并位于所述操作台的上方,所述机械手的另一端与所述研磨轮固定连接。
其中,所述研磨板上具有多个均匀分布的通孔。
其中,所述快速全自动无心磨送料机还包括限位支架,所述限位支架与所述收集盒固定连接,并与所述槽体相适配。
其中,所述快速全自动无心磨送料机还包括把手,所述把手与所述收集盒固定连接,并位于所述收集盒的外侧壁。
本发明的有益效果体现在:通过当操作人员使用所述快速全自动无心磨送料机研磨工件时,将待研磨的工件放置于所述研磨板上,并操作所述控制组件,驱动所述挡框向下移动,使得所述研磨轮对工件进行研磨,研磨完毕后,操作控制组件,驱动所述挡框向上移动,使得研磨完毕后的工件露出,操作人员可取出研磨完毕后的工件,若所述研磨板上堆积的废屑影响下一个工件研磨时,操作人员控制所述移动组件运作,所述移动组件驱动所述刮杆在所述研磨板上来回移动,在所述刮杆在移动过程中,所述研磨板上的废屑通过所述槽体,被刮进所述收集盒内,实现了避免需要花费大量人力清理工件磨削时,产生的废屑,造成人力资源的浪费。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
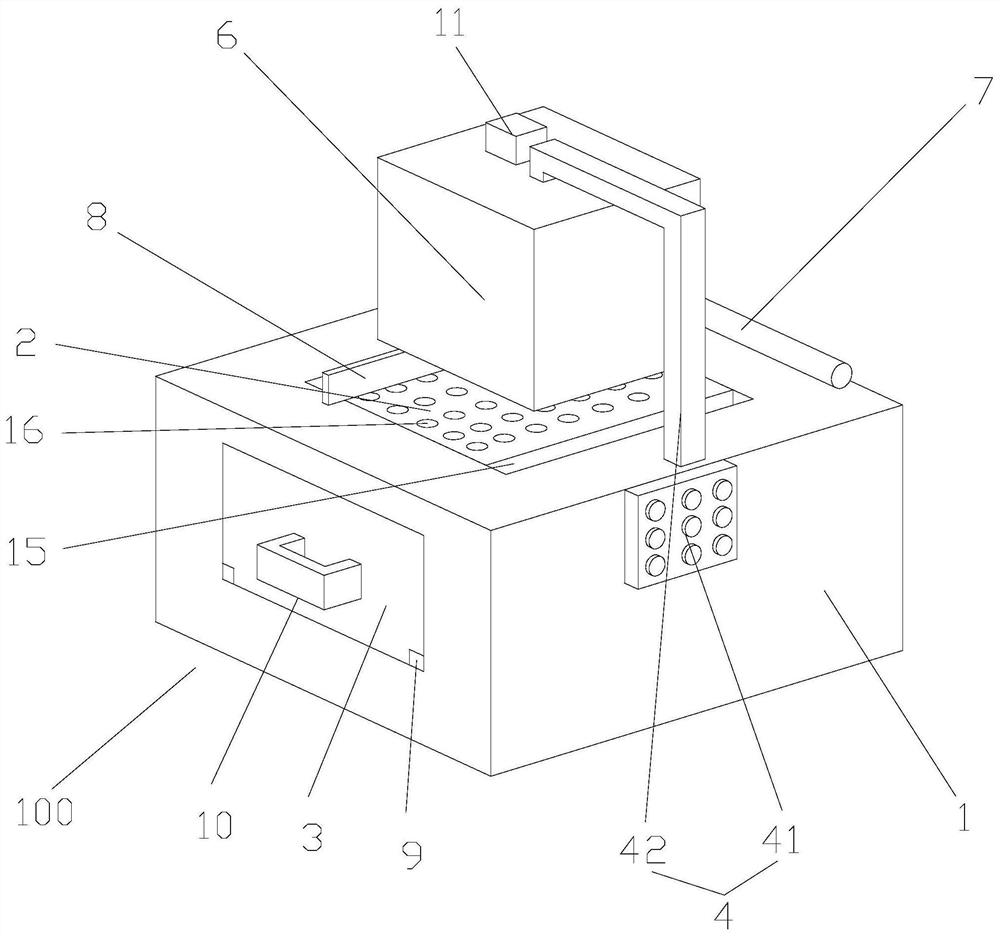
图1是本发明的快速全自动无心磨送料机的结构示意图。
图2是本发明的快速全自动无心磨送料机的正视图。
图3是本发明的图2的A-A线结构剖视图。
图4是本发明的图3的B处局部结构放大图。
100-快速全自动无心磨送料机、1-操作台、2-研磨板、3-收集盒、4-控制组件、5-研磨轮、6-挡框、7-移动组件、8-刮杆、9-限位支架、10-把手、11-推动组件、12-连接杆、13-框体、14-刮条、15-槽体、16-通孔、41-控制器、42-机械手本体、71-电动丝杆、72-套筒、111-气缸、112-推杆。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
请参阅图1至图4,本发明提供了一种快速全自动无心磨送料机100,包括操作台1、研磨板2、收集盒3、控制组件4、研磨轮5、挡框6、移动组件7和刮杆8,所述操作台1上具有槽体15,所述收集盒3与所述操作台1滑动连接,并位于所述槽体15内,所述研磨板2与所述操作台1固定连接,并位于所述收集盒3的上方,所述控制组件4与所述操作台1固定连接,所述研磨轮5与所述控制组件4固定连接,并位于所述研磨板2的上方,所述挡框6与所述控制组件4固定连接,所述移动组件7与所述操作台1固定连接,并位于所述操作台1的上方,所述刮杆8的一端与所述移动组件7固定连接,并与所述研磨板2贴合。
在本实施方式中,当操作人员使用所述快速全自动无心磨送料机100研磨工件时,将待研磨的工件放置于所述研磨板2上,并操作所述控制组件4,驱动所述挡框6向下移动,使得所述研磨轮5对工件进行研磨,研磨完毕后,操作控制组件4,驱动所述挡框6向上移动,使得研磨完毕后的工件露出,操作人员可取出研磨完毕后的工件,若所述研磨板2上堆积的废屑影响下一个工件研磨时,操作人员控制所述移动组件7运作,所述移动组件7驱动所述刮杆8在所述研磨板2上来回移动,在所述刮杆8在移动过程中,所述研磨板2上的废屑通过所述槽体15,被刮进所述收集盒3内,实现了避免需要花费大量人力清理工件磨削时,产生的废屑,造成人力资源的浪费。
进一步地,所述移动组件7包括电动丝杆71和套筒72,所述电动丝杆71与所述操作台1固定连接,并位于所述操作台1的上方,所述套筒72与所述电动丝杆71的输出端固定连接,所述刮杆8的一端与所述套筒72固定连接,并位于所述套筒72的外侧壁。
在本实施方式中,若所述研磨板2上堆积的废屑影响下一个工件研磨时,操作人员控制所述电动丝杆71运作,所述套筒72在所述电动丝杆71的输出端上来回移动,并驱动所述刮杆8在所述研磨板2上来回移动,在所述刮杆8在移动过程中,所述研磨板2上的废屑通过所述槽体15,被刮进所述收集盒3内进行收集。
进一步地,所述控制组件4包括控制器41和机械手本体42,所述控制器41与所述操作台1固定连接,并位于所述操作台1的外侧壁,所述控制器41与所述机械手本体42电性连接,所述机械手本体42的一端与所述操作台1固定连接,并位于所述操作台1的上方,所述机械手的另一端与所述研磨轮5固定连接。
在本实施方式中,当操作人员使用所述快速全自动无心磨送料机100研磨工件时,将待研磨的工件放置于所述研磨板2上,操控所述控制器41,所述控制器41控制所述机械手本体42做出相应动作,驱动所述挡框6向下移动,使得所述研磨轮5对工件进行研磨,研磨完毕后,操控所述控制器41,所述控制器41控制所述机械手本体42做出相应动作,驱动所述挡框6向上移动,使得研磨完毕后的工件露出,操作人员可取出研磨完毕后的工件。
进一步地,所述研磨板2上具有多个均匀分布的通孔16。
在本实施方式中,当工件在进行研磨时,产生的废屑掉落至所述研磨板2上,有的废屑可通过所述通孔16直接掉落至所述收集盒3内进行收集。
进一步地,所述快速全自动无心磨送料机100还包括限位支架9,所述限位支架9与所述收集盒3固定连接,并与所述槽体15相适配。
进一步地,所述快速全自动无心磨送料机100还包括把手10,所述把手10与所述收集盒3固定连接,并位于所述收集盒3的外侧壁。
在本实施方式中,当所述收集盒3内废屑的数量过多时,操作人员可手握所述把手10,并施加拉力,将所述收集盒3抽出,并清理所述收集盒3内的废屑,所述限位支架9与所述槽体15相适配,清理完毕后,操作人员手持所述把手10,将所述限位支架9对准所述槽体15,并施加推力,安装好所述收集盒3,即可继续进行研磨工作。
进一步地,所述快速全自动无心磨送料机100还包括推动组件11、连接杆12、框体13和刮条14,所述推动组件11与所述挡框6固定连接,并位于所述挡框6的上方,且所述推动组件11贯穿所述挡框6的外侧壁,所述连接杆12与所述推动组件11固定连接,所述框体13与所述连接杆12固定连接,所述刮条14与所述框体13固定连接,并位于所述框体13的下方。
进一步地,所述推动组件11包括气缸111和推杆112,所述气缸111与所述挡框6固定连接,并位于所述挡框6的上方,且所述气缸111的输出端贯穿所述挡框6的外侧壁,所述推杆112的一端与所述气缸111的输出端固定连接,所述推杆112的另一端与所述连接杆12固定连接。
在本实施方式中,工件在研磨过程中,所述挡框6挡住废屑,避免废屑四溅,但在所述挡框6的内侧壁上,会粘附废屑,操作人员可控制所述气缸111运作,所述气缸111驱动所述推杆112向下移动,带动所述连接杆12向下移动,此时在所述框体13下方的所述刮条14,在所述挡框6的内侧壁上移动,并将所述挡框6的内侧壁上的废屑进行刮除,避免所述挡框6的内侧壁上粘附的废屑过多,对研磨工作造成影响。
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
- 一种快速全自动无心磨送料机
- 一种快速全自动无心磨送料机