基于协方差矩阵的参考点邻域特征匹配方法
文献发布时间:2023-06-19 12:10:19
技术领域
本发明涉及叶片检测领域,具体涉及一种基于协方差矩阵的参考点邻域特征匹配方法。
背景技术
叶片作为航空发动机的核心部件,其型面精度将直接影响到整机的能量转换效率与工作可靠性。因此,叶片型面的精确检测一直以来都是叶片制造过程中的关键环节。近年来,因具有良好的效率与柔性等特点,基于光学测量的叶片检测方法受到了广泛关注。
专利号为202011134900.7的中国发明专利中公布了一种基于叶片局部前缘曲线特征标定转动中心的方法,该方法直接利用检测平台的运动参数,可有效完成多视场点云数据的配准,但配准过程中不同视角采集的数据并非一一对应关系,在特征匹配时无法实现均匀采样,不能对匹配的特征点作更精准的描述,影响坐标系的标定和检测结果的误差,导致最终叶片检测的可靠性差。
发明内容
本发明的目的在于一种基于协方差矩阵的参考点邻域特征匹配方法,该方法实现了叶片多视场点云数据配准,并提高叶片检测精度与可靠性。
为实现上述目的,本发明采用如下技术方案:
基于协方差矩阵的参考点邻域特征匹配方法,包括如下步骤:
(1)获取转动前后两次叶片的前缘局部特征点云数据集M和
(2)以点
(3)以点
公式(Ⅰ)中,
(4)以第k个采样圆的圆弧分别与连线
(5)采用公式(Ⅱ)构建点A的邻域点特征数据集S的协方差矩阵
公式(Ⅱ)中,
(6)在点云数据集
(7)计算出候选参考数据集
(8)采用公式(Ⅲ)计算出点A的邻域点特征数据集
公式(Ⅲ)中,
进一步地,步骤(2)中所述采样圆的数量
本发明提出一种基于协方差矩阵的参考点邻域特征匹配算法,可快速完成多视场下测量数据之间的最佳对应点搜索,算法计算复杂度小。
附图说明
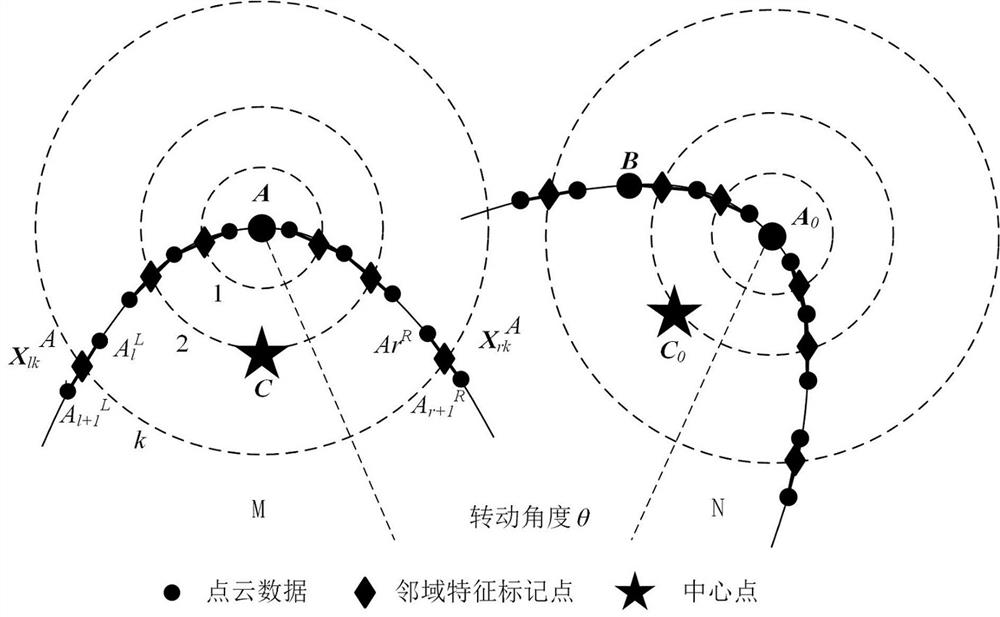
图1为本发明搜索最佳对应点的示意图。
图2为本发明计算邻域特征标记点的示意图。
具体实施方式
本实施例提供的一种基于协方差矩阵的参考点邻域特征匹配方法包括如下步骤:
(1)获取转动前后两次叶片的前缘局部特征点云数据集
(2)以点
(3)以点
公式(Ⅰ)中,
(4)以第
(5)采用公式(Ⅱ)构建点A的邻域点特征数据集
公式(Ⅱ)中,
(6)在点云数据集
(7)计算出候选参考数据集
(8)采用公式(Ⅲ)计算出点A的邻域点特征数据集
公式(Ⅲ)中,
具体是将中心点
将线激光传感器采集的叶片前缘局部特征点云数据集通过转动矩阵平移到同一坐标下进行叶片目标轮廓的重构数据,对比CAD设计模型得出偏差,即可完成叶片的检测。
以上所述仅是本发明优选的实施方式,但本发明的保护范围并不局限于此,任何基于本发明所提供的技术方案和发明构思进行的改造和替换都应涵盖在本发明的保护范围内。
- 基于协方差矩阵的参考点邻域特征匹配方法
- 一种基于邻域推断的图像特征匹配方法及系统