一种基于实时目标机的三维虚拟仿真实验系统及方法
文献发布时间:2023-06-19 12:10:19
技术领域
本发明涉及虚拟仿真技术领域,尤其涉及一种基于实时目标机的三维虚拟仿真实验系统及方法。
背景技术
国家现在推行虚拟仿真实验教学,教学实验中的三维虚拟仿真软件一般基于Unity等三维引擎建立,其本身不具备仿真计算能力,非常简陋。科研上使用的的虚拟仿真工具(如Matlab/Simulink/Labview等)具备较强的仿真计算能力,但制作和运行难度较高,不适合实验教学。
本发明将实时仿真计算与三维虚拟仿真进行结合,提供更为准确和友好的虚拟仿真实验教学。
发明内容
有鉴于此,本发明目的是提供一种基于实时目标机的三维虚拟仿真实验系统及方法,
一种基于实时目标机的三维虚拟仿真实验系统,包括云端库、上位机以及下位机;
所述云端库包括三维模型库和机理模型库;
所述三维模型库和机理模型库是软件库;
所述机理模型库包括数学模型和模型配置文件。
进一步地,所述模型配置文件包含了数学模型的输入和输出参数。
进一步地,所述数学模型的输入参数与三维模型中的可调部位相对应。
进一步地,所述数学模型的输出参数与三维模型中的状态动作相对应。
进一步地,所述上位机为PC机,上位机包含一个实验运行模块。
进一步地,所述所述下位机为实时目标机,为高性能计算机或半实物仿真机。
一种基于实时目标机的三维虚拟仿真实验方法,应用于任一项所述的一种基于实时目标机的三维虚拟仿真实验系统,包括以下步骤:
S1、用户在上位机上启动实验任务,上位机从三维模型库和机理模型库中分别下载实验任务需要的模型及配置文件;
S2、上位机实验运行模块将三维模型与机理模型配置文件进行绑定,从而将三维虚拟仿真的输入输出与机理模型进行绑定;
S3、将绑定关系加载至虚拟仿真实验界面;
S4、上位机将机理模型按下位机要求进行打包,并下载至下位机;
S5、用户启动实验;
S6、下位机负责运行机理模型,并返回输出参数;
S7、上位机将收到的输出参数展示在三维模型上;
S8、用户在上位机上的三维模型中,调节输入参数,上位机将调整后的参数输送至下位机运行,重复S6和S7,直至用户在上位机中关闭实验。
本发明提供的技术方案带来的有益效果是:本发明将实时仿真运算和三维虚拟实验教学进行了结合,有效的改进了传统虚拟仿真实验中仿真不准确和计算延时问题,从而提供了体验更佳的虚拟仿真实验教学。
附图说明
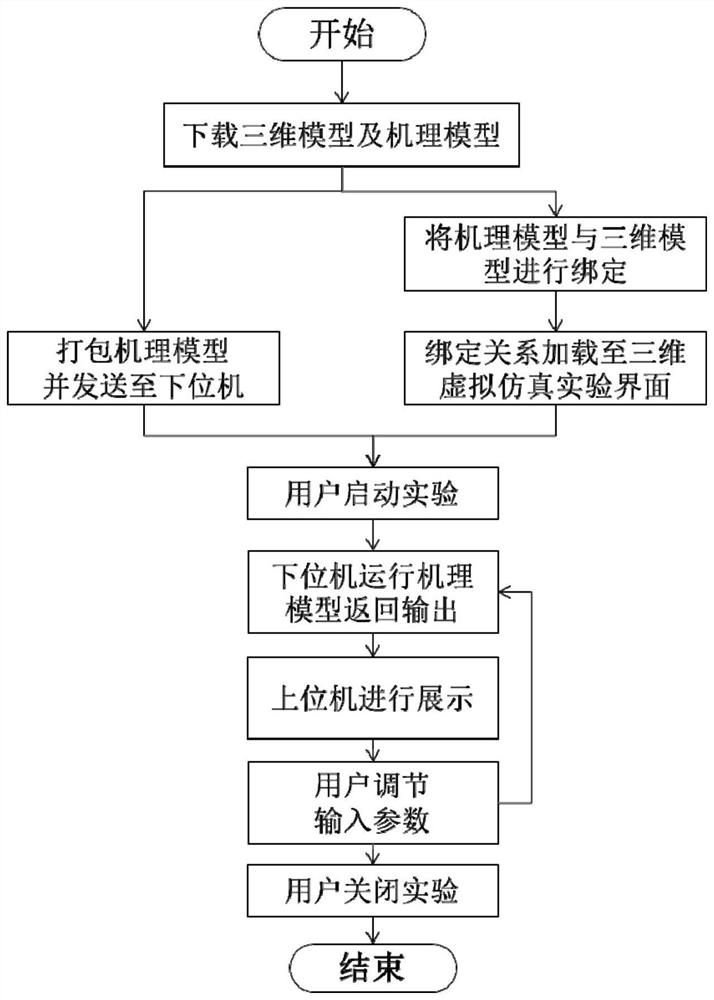
图1是本发明一种基于实时目标机的三维虚拟仿真实验系统及方法流程图;
图2是本发明一种基于实时目标机的三维虚拟仿真实验系统及方法结构图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地描述。
请参考图2,本发明提供了一种基于实时目标机的三维虚拟仿真实验系统及方法;
一种基于实时目标机的三维虚拟仿真实验系统,包括云端库、上位机以及下位机;
所述云端库包括三维模型库和机理模型库;
所述三维模型库和机理模型库是软件库;
所述机理模型库包括数学模型和模型配置文件;
所述模型配置文件包含了数学模型的输入和输出参数;
所述数学模型的输入参数与三维模型中的可调部位相对应;
所述数学模型的输出参数与三维模型中的状态动作相对应。
所述上位机为PC机,上位机包含一个实验运行模块;
所述下位机为实时目标机,为高性能计算机或半实物仿真机。
请参考图1,一种基于实时目标机的三维虚拟仿真实验方法,应用于任一项所述的一种基于实时目标机的三维虚拟仿真实验系统,包括以下步骤:
S1、用户在上位机上启动实验任务,上位机从三维模型库和机理模型库中分别下载实验任务需要的模型及配置文件;
S2、上位机实验运行模块将三维模型与机理模型配置文件进行绑定,从而将三维虚拟仿真的输入输出与机理模型进行绑定;
S3、将绑定关系加载至虚拟仿真实验界面;
S4、上位机将机理模型按下位机要求进行打包,并下载至下位机;
S5、用户启动实验;
S6、下位机负责运行机理模型,并返回输出参数;
S7、上位机将收到的输出参数展示在三维模型上;
S8、用户在上位机上的三维模型中,调节输入参数,上位机将调整后的参数输送至下位机运行,重复S6和S7,直至用户在上位机中关闭实验。
以一个典型的电机拖动实验为例,机理模型包括电机以及电机控制单元。学生可以在三维模型中调整电机负载,电机及电机控制单元机理模型在下位机中进行实时运算,做出相应输出,控制电机运转。电机控制单元的输出和电机运转状态均被返回到上位机中,学生可以在上位机三维模型中观察到电机运行状态的变化。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种基于实时目标机的三维虚拟仿真实验系统及方法
- 基于Unity3D的高自由度实验类三维虚拟仿真方法和系统