一种自动化堆垛机的安全保护系统
文献发布时间:2023-06-19 12:14:58
技术领域
本发明属于仓储设备运输技术领域,具体是一种自动化堆垛机的安全保护系统。
背景技术
仓储物流的发展非常迅速,特别是大物件仓库物流,为了尽可能利用仓库面积,所以仓库的货架都是大型且高度较高的货架,为了从高层货架上存取货物,则采用堆垛机进行搬运。
在现有的技术中,堆垛机在工作过程中,往往会出现堆垛机碰撞、超速以及存取冲突等问题,从而使得堆垛机在工作的过程中存在安全隐患,同时易对货物造成损伤,造成不必要的经济损失,而一般在面对堆垛机超速问题时,往往也只是单纯的依靠设置固定的速度阈值,来判断是否超速,无法动态调整速度阈值,为了解决上述问题,现提供一种自动化堆垛机的安全保护系统。
发明内容
本发明的目的在于提供一种自动化堆垛机的安全保护系统。
本发明所要解决的技术问题为:如何根据堆垛机在不同的使用状态中,动态调整堆垛机的速度阈值,从而降低堆垛机在使用过程中的安全隐患。
本发明的目的可以通过以下技术方案实现:一种自动化堆垛机的安全保护系统,包括控制中心、数据库、信息录入模块、信息采集终端、数据分析模块、安全保护模块、预警模块;所述数据分析模块用于进行水平方向速度分析、垂直方向速度分析、过载分析以及限位分析;
数据分析模块对水平方向速度分析的具体过程包括以下步骤:
步骤S1:实时获取堆垛机的水平运行速度DSv、堆垛机上的载物重量DZv以及堆垛机的所在位置;
步骤S2:当堆垛机的位置未在减速预警段或停止预警段时,则通过公式
步骤S3:当CX≤0时,则判定堆垛机的水平运行速度为正常状态;当CX>0时,则判定堆垛机的水平运行速度为超速状态;当堆垛机的水平运行速度为超速状态时,则将堆垛机的实时数据信息发送至安全保护模块;
步骤S4:当堆垛机的位置处于减速预警段或停止预警段时,则通过安全保护模块对堆垛机进行安全防护措施;
数据分析模块对垂直方向速度分析的具体过程包括以下步骤:
步骤C1:实时获取堆垛机的垂直运行速度DCv、堆垛机上的载物重量DZv以及堆垛机上的载物高度DZh;
步骤C2:通过公式
步骤C3:当DCv>DXv时,则判定堆垛机的垂直运行速度超速;当DCv≤DXv时,则判定堆垛机的垂直运行速度正常;
数据分析模块对过载分析的具体过程包括以下步骤:
步骤Z1:获取堆垛机上的载物重量DZv以及堆垛机在垂直方向的加速度Ca;
步骤Z2:通过公式DZs=DZv×(Ca+g)/g获得堆垛机上的测量载物重量DZs,其中g为重力加速度;
步骤Z3:当DZs≥1.15VC
数据分析模块对限位分析的具体过程包括以下步骤:
步骤X1:通过在载货台上设置若干个光电超限检测单元,获取载货台上的货物的尺寸;通过存储位内的限位单元获得存储位可存储的最大尺寸;
步骤X2:将获得的货物尺寸与存储位可存储的最大尺寸进行匹配;若货物尺寸超出存储位可存储的最大尺寸,则判定货物超限;若货物尺寸未超出存储位可存储的最大尺寸,则判定货物未超限;
步骤X3:对存储架上的空闲存储位进行标记,并将未超限的货物输送至空闲存储位内;
通过数据分析模块进行水平方向速度分析、垂直方向速度分析、过载分析以及限位分析,从而实现堆垛机的安全防护功能。
进一步地,所述信息录入模块用于对堆垛机的基本参数和工作区域的基本信息进行信息录入,并将堆垛机的基本参数和工作区域的基本信息上传至数据库中进行保存。
进一步地,所述信息采集终端包括堆垛机上的速度采集单元、称重单元以及堆垛机定位单元;所述信息采集终端还包括载货台上的高度采集单元、承重采集单元以及载物台定位单元,通过信息采集终端实时获取信息,所述信息采集终端还包括存储架上的限位单元。
进一步地,所述安全保护模块用于对堆垛机进行安全防护,所述安全防护包括行走保护、起升保护、过载保护以及货台保护。
进一步地,所述行走保护的具体内容为在巷道的两端设置有减速预警段和停止预警段,减速预警段内设置有强迫换速开关,停止预警段内设置有终端限位开关;堆垛机进入减速预警段内时,通过强迫换速开关对堆垛机进行降速;堆垛机进入停止预警段内时,通过终端限位开关,断开堆垛机电源,并通过预警模块向控制中心发出预警;当堆垛机未进入减速预警段或停止预警段时,且堆垛机的水平运行速度处于超速状态,则自动降低堆垛机的水平运行速度。
进一步地,所述起升保护的具体内容为在堆垛机设置有升降超速保护装置,升降超速保护装置由限速器和制动夹紧装置共同组成,当堆垛机的垂直运行速度超速时,则通过限速器与制动夹紧装置降低堆垛机的升降速度。
进一步地,所述过载保护的具体内容为当堆垛机处于超载状态时,则触发预警模块进行报警,同时堆垛机整体机构停止运转。
进一步地,所述货台保护的具体内容为载货台上的光电超限检测单元获取货物的尺寸,当货物尺寸超限时,则预警模块发出警报,并不予进入存储位;当货物尺寸未超限时,则获取闲置存储位,并将货物送至闲置存储位内,同时当发现存储位内存在货物时,立即停止送货,同时预警模块发出警报。
本发明的有益效果:
1、本发明通过设置有数据分析模块,对堆垛机进行水平方向速度分析、垂直方向速度分析、过载分析以及限位分析,在进行水平方向速度分析和垂直方向速度分析时,通过设置超速系数CX和垂直许可运行速度DXv,从而使得堆垛机能够根据所承载的货物重量,动态调整速度阈值,大大提高堆垛机在使用过程中的安全性能;同时消除了堆垛机在加速和减速的过程中,因为惯性的作用,会导致货台的承载重量的检测值与实际值出现偏差,从而造成误报警的问题。
2、本发明设置有信息采集终端,通过信息采集终端对堆垛机的基本参数进行实时采集,然后将实时采集到的参数信息通过数据分析模块进行分析,并将数据分析模块的分析结果发送至安全保护模块,通过安全保护模块根据数据分析模块的分析结果进行安全防护:行走保护:在巷道的两端设置有减速预警段和停止预警段,减速预警段内设置有强迫换速开关,停止预警段内设置有终端限位开关;堆垛机进入减速预警段内时,通过强迫换速开关对堆垛机进行降速;堆垛机进入停止预警段内时,通过终端限位开关,断开堆垛机电源,并通过预警模块向控制中心发出预警;当堆垛机未进入减速预警段或停止预警段时,且堆垛机的水平运行速度处于超速状态,则自动降低堆垛机的水平运行速度,从而确保设备和人员安全;
起升保护:堆垛机设置有升降超速保护装置,升降超速保护装置由限速器和制动夹紧装置共同组成,当堆垛机的垂直运行速度超速时,则通过限速器与制动夹紧装置降低堆垛机的升降速度,能够避免在升降的过程中因为超速,而造成安全事故;
过载保护:当堆垛机处于超载状态时,则触发预警模块进行报警,同时堆垛机整体机构停止运转,从而能够避免堆垛机因为超载而存在安全隐患;
货台保护:载货台上的光电超限检测单元获取货物的尺寸,当货物尺寸超限时,则预警模块发出警报,并不予进入存储位;当货物尺寸未超限时,则获取闲置存储位,并将货物送至闲置存储位内,同时当发现存储位内存在货物时,立即停止送货,同时预警模块发出警报,避免出现双重入库的情况发生。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
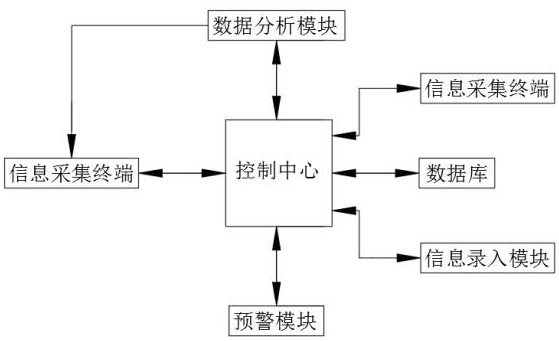
图1为一种自动化堆垛机的安全保护系统的原理框图。
具体实施方式
如图1所示,一种自动化堆垛机的安全保护系统,包括控制中心、数据库、信息录入模块、信息采集终端、数据分析模块、安全保护模块、预警模块;
所述信息录入模块用于对堆垛机的基本参数和工作区域的基本信息进行信息录入,堆垛机的基本参数包括额定起升重量、货箱尺寸、水平运行速度、起升速度、货叉伸缩速度、水平加速度、垂直加速度、整机高度、货叉形式、导电方式、通讯方式、出入库作业方式、定位方式以及定位精度;所述工作区域的基本信息包括巷道所处区域、巷道长度以及载货台位置,还包括存储架的所在位置、存储架的存储位数量以及位置;并将堆垛机的基本参数和工作区域的基本信息上传至数据库中进行保存。
所述信息采集终端包括堆垛机上的速度采集单元、称重单元以及堆垛机定位单元;所述信息采集终端还包括载货台上的高度采集单元、承重采集单元以及载物台定位单元,通过信息采集终端实时获取信息,所述信息采集终端还包括存储架上的限位单元;具体过程包括以下内容:
通过速度采集单元获取堆垛机在地轨上的水平运行速度以及垂直运行速度,并将堆垛机在地轨上的水平运行速度以及垂直运行速度分别标记为DSv和DCv;通过称重单元实时获取堆垛机上的载物重量,并标记为DZv;通过承重采集单元获得载物台上的载物重量,并标记为ZZv;通过堆垛机定位单元对堆垛机的位置进行定位以及通过载物台定位单元对载物台的位置进行定位;所述地轨的两端均分别设置有减速预警段和停止预警段;
定位过程具体包括以下步骤:
步骤D1:以堆垛机所在地轨的一端为原点,建立三维坐标系;
步骤D2:实时获取堆垛机的所在位置以及货叉的所在位置,并生成对应的三维坐标点;
步骤D3:对存储架上的每个存储位进行标记,并生成三维坐标点位;
步骤D4:将步骤D1-D3获得的数据上传至数据库中进行保存;
所述数据分析模块用于对信息采集终端获取到的数据进行分析,具体分析过程包括以下步骤:
水平方向速度分析
步骤S1:实时获取堆垛机的水平运行速度DSv、堆垛机上的载物重量DZv以及堆垛机的所在位置;
步骤S2:当堆垛机的位置未在减速预警段或停止预警段时,则通过公式
步骤S3:当CX≤0时,则判定堆垛机的水平运行速度为正常状态;当CX>0时,则判定堆垛机的水平运行速度为超速状态;当堆垛机的水平运行速度为超速状态时,则将堆垛机的实时数据信息发送至安全保护模块;
步骤S4:当堆垛机的位置处于减速预警段或停止预警段时,则通过安全保护模块对堆垛机进行安全防护措施。
垂直方向速度分析
步骤C1:实时获取堆垛机的垂直运行速度DCv、堆垛机上的载物重量DZv以及堆垛机上的载物高度DZh;
步骤C2:通过公式
步骤C3:当DCv>DXv时,则判定堆垛机的垂直运行速度超速;当DCv≤DXv时,则判定堆垛机的垂直运行速度正常。
过载分析
步骤Z1:获取堆垛机上的载物重量DZv以及堆垛机在垂直方向的加速度Ca;
步骤Z2:通过公式DZs=DZv×(Ca+g)/g获得堆垛机上的测量载物重量DZs,其中g为重力加速度;
步骤Z3:当DZs≥1.15VC
限位分析
步骤X1:通过在载货台上设置若干个光电超限检测单元,获取载货台上的货物的尺寸;通过存储位内的限位单元获得存储位可存储的最大尺寸;
步骤X2:将获得的货物尺寸与存储位可存储的最大尺寸进行匹配;若货物尺寸超出存储位可存储的最大尺寸,则判定货物超限;若货物尺寸未超出存储位可存储的最大尺寸,则判定货物未超限;
步骤X3:对存储架上的空闲存储位进行标记,并将未超限的货物输送至空闲存储位内。
所述安全保护模块用于对堆垛机进行安全防护,所述安全防护包括行走保护、起升保护、过载保护以及货台保护;
行走保护:在巷道的两端设置有减速预警段和停止预警段,减速预警段内设置有强迫换速开关,停止预警段内设置有终端限位开关;堆垛机进入减速预警段内时,通过强迫换速开关对堆垛机进行降速;堆垛机进入停止预警段内时,通过终端限位开关,断开堆垛机电源,并通过预警模块向控制中心发出预警;当堆垛机未进入减速预警段或停止预警段时,且堆垛机的水平运行速度处于超速状态,则自动降低堆垛机的水平运行速度,从而确保设备和人员安全;
起升保护:堆垛机设置有升降超速保护装置,升降超速保护装置由限速器和制动夹紧装置共同组成,当堆垛机的垂直运行速度超速时,则通过限速器与制动夹紧装置降低堆垛机的升降速度;
过载保护:当堆垛机处于超载状态时,则触发预警模块进行报警,同时堆垛机整体机构停止运转;
货台保护:载货台上的光电超限检测单元获取货物的尺寸,当货物尺寸超限时,则预警模块发出警报,并不予进入存储位;当货物尺寸未超限时,则获取闲置存储位,并将货物送至闲置存储位内,同时当发现存储位内存在货物时,立即停止送货,同时预警模块发出警报,避免出现双重入库的情况发生。
工作原理:信息录入模块用于对堆垛机的基本参数和工作区域的基本信息进行信息录入,然后将堆垛机的基本参数和工作区域的基本信息上传至数据库中进行保存;通过信息采集终端包括堆垛机上的速度采集单元、称重单元以及堆垛机定位单元;信息采集终端还包括载货台上的高度采集单元、承重采集单元以及载物台定位单元,通过信息采集终端实时获取信息,所述信息采集终端还包括存储架上的限位单元;通过速度采集单元获取堆垛机在地轨上的水平运行速度以及垂直运行速度,通过称重单元实时获取堆垛机上的载物重量,通过承重采集单元获得载物台上的载物重量;通过堆垛机定位单元对堆垛机的位置进行定位以及通过载物台定位单元对载物台的位置进行定位;在地轨的两端均分别设置有减速预警段和停止预警段;
数据分析模块根据信息采集终端获取到的数据分别进行水平方向速度分析、垂直方向速度分析、过载分析、限位分析,最后通过安全保护模块根据数据分析的结构对堆垛机进行安全防护:
行走保护:在巷道的两端设置有减速预警段和停止预警段,减速预警段内设置有强迫换速开关,停止预警段内设置有终端限位开关;堆垛机进入减速预警段内时,通过强迫换速开关对堆垛机进行降速;堆垛机进入停止预警段内时,通过终端限位开关,断开堆垛机电源,并通过预警模块向控制中心发出预警;当堆垛机未进入减速预警段或停止预警段时,且堆垛机的水平运行速度处于超速状态,则自动降低堆垛机的水平运行速度,从而确保设备和人员安全;
起升保护:堆垛机设置有升降超速保护装置,升降超速保护装置由限速器和制动夹紧装置共同组成,当堆垛机的垂直运行速度超速时,则通过限速器与制动夹紧装置降低堆垛机的升降速度;
过载保护:当堆垛机处于超载状态时,则触发预警模块进行报警,同时堆垛机整体机构停止运转;
货台保护:载货台上的光电超限检测单元获取货物的尺寸,当货物尺寸超限时,则预警模块发出警报,并不予进入存储位;当货物尺寸未超限时,则获取闲置存储位,并将货物送至闲置存储位内,同时当发现存储位内存在货物时,立即停止送货,同时预警模块发出警报,避免出现双重入库的情况发生。
上述公式均是去除量纲取其数值计算,公式是由采集大量数据进行软件模拟得到最接近真实情况的一个公式,公式中的预设参数和预设阈值由本领域的技术人员根据实际情况设定或者大量数据模拟获得。
以上内容仅仅是对本发明结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围,此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
- 一种自动化堆垛机的安全保护系统
- 一种自动化立体库中的堆垛机平衡装置及自动化立体库