一种工业机器人的数字孪生实训方法及系统
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及智能设备及机器人技术领域,尤其是涉及一种工业机器人的数字孪生实训方法及系统。
背景技术
在工业机器人市场已呈现出蓬勃发展的产业态势,在汽车制造、机床上下料、毛坯制造(冲压、压铸、锻造等)、机械加工、焊接、热处理、表面涂覆、装配、检测及仓库堆垛等作业中应用越来越广泛,工业机器人将成为一种标准设备而得到广泛应用。各个领域对工业机器人的需求不断增长,需求量逐年递增。随着工业机器人向更深更广方向的发展以及机器人智能化水平的提高,机器人的应用范围还在不断扩大,使用工业机器人的企业越来越多,但是熟悉工业机器人现场编程、机器人安装调试、维护等方面的人才严重不足,预计未来3-5年,工业机器人的增速达到25%,高技能人才缺口将逐年增大。
工业机器人操作与运维技能培训是培养工业机器人技术技能型人才的重要手段,但是工业机器人系统昂贵,实训设备维护成本高,目前面临培训设备不足、师资短缺、培训设备多元化等问题,难以满足工业机器人产业对技能型人才的需求。
发明内容
针对上述技术问题,本发明提供了一种工业机器人的数字孪生实训方法及系统,利用数字孪生技术,仿真运行工业机器人操作与运维的实操,并将虚拟操作结果转接至机器人实物操作,实现虚实融合式实习实训,使数字培训平台与实体工业机器人协调一致。所述技术方案如下:
本发明实施例提供了一种工业机器人的数字孪生实训方法,步骤包括:
向实训台控制器发送用于控制实训台控制器和工业机器人控制器的操作指令,同时获取实训台控制器和工业机器人控制器的实时数据;
将所述实时数据输入至实训虚拟模型进行运算;
接收所述实训虚拟模型运算所得的仿真结果。
作为优选方案,所述实训虚拟模型可通过以下步骤实现:
根据实训台和工业机器人本体的各个组成部分进行三维建模;
通过定义各个所述组成部分的属性、事件以及各个所述组成部分的事件相互之间的逻辑关系,构建虚拟场景。
作为优选方案,所述根据实训台和工业机器人本体的各个组成部分进行三维建模,具体为:
获取测量零部件所得的几何尺寸后,添加零部件的几何关系,以生成仿真零部件;
调用多个所述仿真零部件,并对多个所述仿真零部件进行装配。
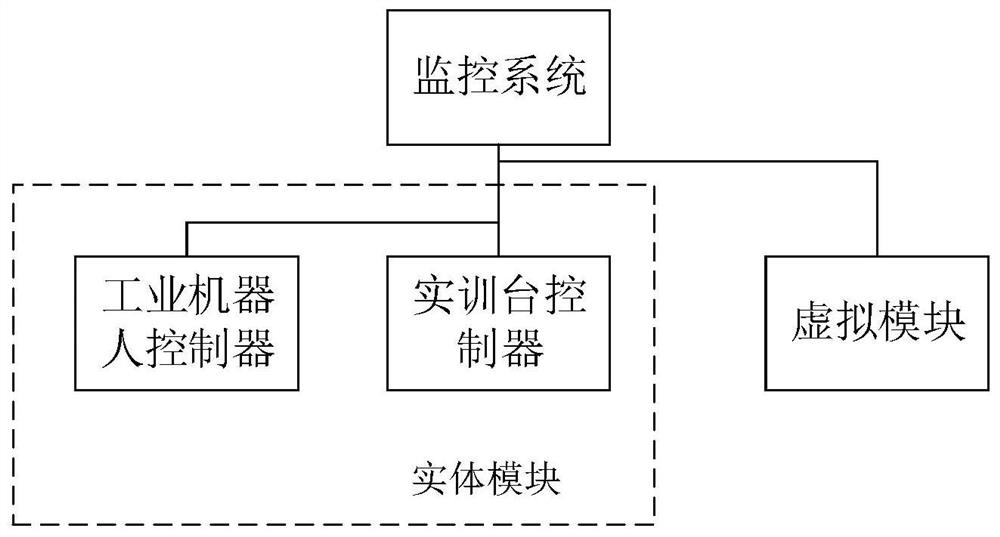
为了解决相同的技术问题,本发明实施例提供了一种工业机器人的数字孪生实训系统,包括监控模块、虚拟模块、实体模块;
所述虚拟模块,用于运行实训虚拟模型;
所述实体模块包括实训台控制器和工业机器人控制器,用于控制实训台和工业机器人本体;
所述监控模块,用于:
向实训台控制器发送用于控制实训台控制器和工业机器人控制器的操作指令,同时获取实训台控制器和工业机器人控制器的实时数据;
将所述实时数据输入至实训虚拟模型进行运算;
接收所述实训虚拟模型运算所得的仿真结果。
作为优选方案,所述实训虚拟模型可通过以下步骤实现:
根据实训台和工业机器人本体的各个组成部分进行三维建模;
通过定义各个所述组成部分的属性、事件以及各个所述组成部分的事件相互之间的逻辑关系,构建虚拟场景。
作为优选方案,所述根据实训台和工业机器人本体的各个组成部分进行三维建模,具体为:
获取测量零部件所得的几何尺寸后,添加零部件的几何关系,以生成仿真零部件;
调用多个所述仿真零部件,并对多个所述仿真零部件进行装配。
作为优选方案,所述实训台还包括滑台、送料单元、加工单元、入库单元;
所述实训台控制器与所述工业机器人控制器通过以太网接口连接进行数据交换,所述实训台控制器通过profinet网络分别连接所述滑台、所述送料单元、所述加工单元、所述入库单元的执行机构以对应控制所述滑台、所述送料单元、所述加工单元、所述入库单元同时进行数据交换。
作为优选方案,所述实体模块还包括若干个传感器;所述若干个传感器可分为内部传感器和外部传感器;
所述内部传感器,用于检测所述工业机器人本体的状态,并将检测到的机器人状态数据输入至所述工业机器人控制器,以协助所述工业机器人控制器根据所述机器人状态数据控制所述工业机器人本体完成规定的运动和功能;
所述外部传感器,用于检测所述工业机器人工作环境的状态,并将检测到的环境状态数据输入至所述监控系统,以协助所述监控系统制定发送给所述工业机器人控制器的操作指令。
相比于现有技术,本发明实施例具有如下有益效果:
本方案提供一种工业机器人的数字孪生实训方法及系统,在本方案中,操作人员通过向工业机器人控制器发送操作指令可以控制工业机器人执行相关工作,并且工业机器人在执行相关工作时会产生实时数据;将所述实时数据输入至实训虚拟模型进行运算,一方面,实训虚拟模型跟随所述实时数据变化而变化,从而使实训虚拟模型更逼真;另一方面,所述实时数据输入至所述实训虚拟模型后,所述实训虚拟模型在虚拟的工业机器人应用环境中规划工业机器人的运动路径,动态模拟工业机器人的运动过程,观察其运动结果,验证程序的正确性和工艺的可行性,继而运算出仿真结果,完成仿真实训,既节约设备成本,又节约场地、时间,弥补了机器人教学资源不足的问题,同时缩短工业机器人的编程和调试周期,提高学生学习工业机器人的效率。
另外,由于仿真结果可反馈至监控系统,然后操作员可以根据仿真结果生成操作指令,从而控制所述工业机器人控制器、控制工业机器人,完成现实场景中的工业机器人的操作与运维的实际操作,进而实现了虚拟系统和物理系统的同步运动的虚实融合式实习实训。
附图说明
图1是本发明实施例中的一种工业机器人的数字孪生实训方法的具体流程图;
图2是本发明实施例中的一种工业机器人的数字孪生实训方法的建立实训虚拟模型的流程图;
图3是本发明实施例中的一种工业机器人的数字孪生实训方法的定义零部件的流程图;
图4是本发明实施例中的一种工业机器人的数字孪生实训方法的零部件建模的流程图;
图5是本发明实施例中的一种工业机器人的数字孪生实训方法的装配零部件的流程图;
图6是本发明实施例中的一种工业机器人的数字孪生实训系统的模块架构图;
图7是本发明实施例中的一种工业机器人的数字孪生实训系统的数据流向示意图;
图8是本发明实施例中的一种工业机器人的数字孪生实训系统内部各部分的控制信号、实时数据流向的示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参见图1,本方案提供一种示例性实施例,一种工业机器人的数字孪生实训方法,步骤包括:
向实训台控制器发送用于控制实训台控制器和工业机器人控制器的操作指令,同时获取实训台控制器和工业机器人控制器的实时数据;
将所述实时数据输入至实训虚拟模型进行运算;
接收所述实训虚拟模型运算所得的仿真结果。
可以理解的是,所述实训虚拟模型是对物理模型真实的数字化镜像,能展示物理对象的外形结构、几何尺寸、运动状态,在数据的传输驱动下,虚拟模型跟随物理对象运转,可高效、准确的评估、预测、优化实体模型并能为实体模型赋予智能。
可以理解的是,所述实时数据是实训台上的真实数据和工业机器人运行过程中的数据,这些数据随着工作台上物料的移动及机器人的运动在不断变化,工作台上的数据一般包括,启动、停止、物料到位信号、传输带运行方向、传输带运行速度、传输带位置、电机运行状态、气缸张开/加紧状态、气缸伸出/缩回状态、送料到位、入库位置号等等;工业机器人相关数据一般包括夹具加紧/张开状态、机器人的位置、角度、速度、角速度、加速度、距离等等数据。
在本实施例中,操作员通过监控系统人机界面发出操作指令,实训台接收到指令后执行相应的动作。可以理解的是,操作员可以根据所述实训虚拟模型运算所得的仿真结果进行操作,所述仿真结果至少包括虚拟实训台和虚拟工业机器人的形状、大小、运行方向、速度、位置,零部件与零部件之间的连接关系、该零部件运动的驱动事件等。
虚拟模型接收实训台的数据和工业机器人的数据,更新虚拟模型中零部件的属性和运动参数,进一步驱动模型运行,使虚拟系统和实体系统保持一致。
监控系统组态软件随时接收实训台的数据和工业机器人的数据,实时监控实训台和工业机器人的运行状态,当遇到意外情况立即停止执行,将损失减少到最低;将最新数据保存在数据库中,形成历史数据,进行数据分析,成为生产工艺流程改进的依据。
请参见图2,本方案提供一种优选实施例,所述实训虚拟模型可通过以下步骤实现:
根据实训台和工业机器人本体的各个组成部分进行三维建模;可以理解的是,三维建模完成后还需要进行模型渲染。
通过定义各个所述组成部分的属性、事件以及各个所述组成部分的事件相互之间的逻辑关系,构建虚拟场景。
在本实施例中,所述模型渲染,即三维模型创建完成后,SolidWork导出为Stl格式文件,利用3ds Max软件导入Stl格式文件,将材质、灯光与模型贴合、融合在一起,让它呈现出实物般、照片质量的图像。
请参见图3,定义零部件的属性,如形状、大小、运行方向、速度等;定义零部件的事件,则分为简单事件、较复杂事件、复杂事件,设置或定义零部件的事件,简单的事件只需要设置,如“传输带”运行条件的事件是启动按钮按下;较复杂的事件需要设置逻辑关系,如“物料”到位开启加工工序的事件是夹具加紧且物料到位二个信号同时有效;复杂的事件需要在Unity3D中用脚本语言编写特定的事件函数。通过零部件的事件来控制虚拟模型的运动。
在本实施例中,所述根据实训台和工业机器人本体的各个组成部分进行三维建模,具体为:
获取测量零部件所得的几何尺寸后,添加零部件的几何关系,以生成仿真零部件;可以理解的是,测量实训台和工业机器人本体的各零部件的几何尺寸、相对位置等。
调用多个所述仿真零部件,并对多个所述仿真零部件进行装配。
请参见图4,三维建模,采用SolidWork软件设计模型,包括零部件的建模和装配。零部件的建模包括包括工作台、操作面板、夹具、送料单元、加工单元、装配单元、入库单元等建模,每个零部件的建模就是单个零部件的造型设计。
请参见图5,装配是将设计的零部件按实际装配要求进行组装,如送料单元的建模过程,分别对支架、出料气缸、顶料气缸、电机、传输皮带、滚轮、料仓等进行造型设计;支架装配、传输皮带及滚轮装配、气缸装配;然后将它们装配成送料单元的实体模型。
请参见图6,本方案提供一种示例性实施例,一种工业机器人的数字孪生实训系统,包括监控模块、虚拟模块、实体模块;
所述虚拟模块,用于运行实训虚拟模型;可以理解的是,所述实训虚拟模型是对物理模型真实的数字化镜像,能展示物理对象的外形结构、几何尺寸、运动状态,在数据的传输驱动下,虚拟模型跟随物理对象运转,可高效、准确的评估、预测、优化实体模型并能为实体模型赋予智能。
所述实体模块包括实训台控制器和工业机器人控制器,用于控制实训台和工业机器人本体;
所述监控模块,用于:
向实训台控制器发送用于控制实训台控制器和工业机器人控制器的操作指令,同时获取实训台控制器和工业机器人控制器的实时数据;
将所述实时数据输入至实训虚拟模型进行运算;
接收所述实训虚拟模型运算所得的仿真结果。
请参见图7,在实体模块、虚拟模块、监控模块之间进行数据交互的通信连接,是实训设备和实训虚拟模型数据交互的通道。实训设备通过TCP协议实时将采集的物理对象的数据传输到虚拟模型,驱动虚拟模型实现同步运动。
本方案提供一种优选实施例,所述实训虚拟模型可通过以下步骤实现:
根据实训台和工业机器人本体的各个组成部分进行三维建模;可以理解的是,三维建模完成后还需要进行模型渲染。
通过定义各个所述组成部分的属性、事件以及各个所述组成部分的事件相互之间的逻辑关系,构建虚拟场景。
在本实施例中,所述模型渲染,即三维模型创建完成后,SolidWork导出为Stl格式文件,利用3ds Max软件导入Stl格式文件,将材质、灯光与模型贴合、融合在一起,让它呈现出实物般、照片质量的图像。
在本实施例中,所述根据实训台和工业机器人本体的各个组成部分进行三维建模,具体为:
获取测量零部件所得的几何尺寸后,添加零部件的几何关系,以生成仿真零部件;可以理解的是,测量实训台和工业机器人本体的各零部件的几何尺寸、相对位置等。
调用多个所述仿真零部件,并对多个所述仿真零部件进行装配。
所述实训系统包括物理实体模型、虚拟模型、监控系统、数据及各部分之间与数据进行交互的通信连接。
所述监控系统由触摸屏计算机组成,其功能通过监控系统组态软件实现。能与物理系统和虚拟系统进行实时通信,监控系统组态软件通过操作界面向物理系统发送指令,控制物理系统执行工作;监控系统组态软件随时接收实训台的数据和工业机器人的数据,监控实训台和工业机器人的运行状态,当遇到意外情况立即停止执行,将损失减少到最低;将实训台和工业机器人的最新数据保存在数据库中,形成历史数据,进行数据分析,成为生产工艺流程改进的依据;虚拟系统实时读取监控系统数据库中的数据,实时更新零部件的属性和参数,使虚拟系统和实体系统保持一致。
所述工业机器人本体包括机座和执行机构、臂部、腕部和手部等,本实训系统采用IRB120 ABB工业机器人,所述工业机器人本体的核心是工业机器人控制器,包括输入接口、输出接口、通信接口,输入接口连接内部传感器,输出接口连接驱动器、继电器、指示灯等。
所述实训台控制器包括操作面板、控制单元;所述操作面板包括实训台的启动按钮、停止按钮、急停按钮,以及送料单元、加工单元、入库单元的启动按钮、停止按钮。所述控制单元,主要由S7-1200PLC控制器及IO模块组成,包括64路输入通道和48路输出通道,输入通道连接开关、按钮等设备,输出通道连接继电器、电磁阀等设备。
请参见图8,本方案还提供一个优选实施例,所述实训台还包括滑台、送料单元、加工单元、入库单元;
所述实训台控制器与所述工业机器人控制器通过以太网接口连接进行数据交换,所述实训台控制器通过profinet网络分别连接所述滑台、所述送料单元、所述加工单元、所述入库单元的执行机构以对应控制所述滑台、所述送料单元、所述加工单元、所述入库单元同时进行数据交换。
具体地,所述实训台还包括工作台。
所述工作台用铝型材和钢板焊接组成。
所述滑台由滚珠丝杠和直线导轨组成,通过执行机构控制导轨移动,完成机器人在送料单元、加工单元、入库单元之间的位置移动。其对应的执行机构主要包括交流伺服驱动器和交流伺服电动机。
所述送料单元主要由传送装置、执行机构、夹爪工具、待加工的原料等组成。待加工的原料放置在料库内,按启动按钮后,S7-1200PLC通过执行机构控制传送带将原料运送到机器人抓取原料位置后传送带停止,S7-1200PLC通过滑台的执行机构控制滑台沿导轨将工业机器人运送到送料单元位置处,此时将到位信号发送给机器人控制器,启动工业机器人更换夹爪工具,并移动到原料抓取位置,抓取原料。其对应的执行机构主要由交流步进驱动器和交流步进电动机构成。
所述加工单元主要由切割机、打磨机、抛光机、执行机构、夹爪工具、废料储存台等组成。机器人抓取原料后,S7-1200PLC通过滑台的执行机构控制滑台沿导轨将工业机器人运送到加工单元位置处,机器人松开夹具放下原料,当PLC控制器检测到原料到位信号后,启动机器人更换切割工具,S7-1200PLC通过加工单元的执行机构控制切割机工作,机器人将原料旋转使切割机完成切割,之后机器人将原料放到原料台,机器人更换打磨工具,S7-1200PLC通过加工单元的执行机构控制打磨机工作,完成打磨后,S7-1200PLC通过加工单元的执行机构控制抛光机工作,完成物料加工。其对应的执行机构主要由交流步进驱动器和交流步进电动机构成。
所述入库单元,主要由立式仓位等组成。S7-1200PLC通过滑台的执行机构控制滑台沿导轨将工业机器人运送到入库单元位置,仓位是立式结构,有3行3列共9个位置号,最下层为第1行,最上层为第3行,每行从左到右编号,第1行编号为1,2,3,第2行编号为4,5,6,第3行编号为7,8,9,每个仓位有一个占位信号,当有物料时该位置为1信号,否则为0。机器人完成物料加工后,更换夹具,抓取物料沿导轨移动到入库单元,PLC控制器检测仓库物料放置的目标位置,检测从1号位到9号位哪个位置是空的,这个物料就放入编号小的空余仓位,放入物料后,检测到该位信号为1,则入库成功。机器人回原点。其对应的执行机构主要由交流步进驱动器和交流步进电动机构成。
本方案还提供一个优选实施例,所述实体模块还包括若干个传感器;所述若干个传感器可分为内部传感器和外部传感器;
所述内部传感器,用于检测所述工业机器人本体的状态,并将检测到的机器人状态数据输入至所述工业机器人控制器,以协助所述工业机器人控制器根据所述机器人状态数据控制所述工业机器人完成规定的运动和功能;
所述外部传感器,用于检测所述工业机器人工作环境的状态,并将检测到的环境状态数据输入至所述监控系统,以协助所述监控系统制定发送给所述工业机器人控制器的操作指令。
可以理解的是,传感器检测作业对象及环境与机器人的联系,包括内部传感器和外部传感器,内部传感器用来检测机器人本身状态,如检测位置和角度的传感器。外部传感器用来检测机器人所处环境,如是什么物体,离物体的距离有多远,物体的状况如抓取的物体是否滑落,有物体识别传感器、物体探伤传感器、接近传感器、距离传感器、力觉传感器,听觉传感器等。传感器的输出能反映实训台的工作状态,随时监测物理对象的实时运行状态。
在本实施例中,所述内部传感器和所述外部传感器对应两级控制系统。
一级控制系统由控制器、驱动器、执行器、内部传感器组成,这是机器人的本体控制系统。内部传感器输出的数据包括位置、角度、速度、角速度、加速度等信息,这些数据接入控制器,控制器连接驱动器,控制器根据机器人的作业指令以及从传感器反馈回来的信号,支配机器人的执行机构去完成规定的运动和功能。机器人在执行动作的过程中位置、速度等数据不断发生变化,控制器根据数据的变化调节输出给驱动器、执行器,传感器将机器人的运动输出信号反馈回控制器形成局部闭环控制,从而更加精确的控制机器人在空间的运动。
二级控制系统由一级控制系统、监控系统、外部传感器、操作环境组成,这是实训系统的控制系统。操作环境通过外部传感器与监控系统相连,监控系统收到操作人员的作业指令后,监控系统软件进行分析后转换指令发送给控制器能接收的命令,控制器确定机器人的运动参数,这些参数输出到驱动器,作为执行系统的给定信号,驱动机器人执行运动。传感器的数据输出到监控系统,监控物理对象的实时运行状态。
本方案还提供一种具体实施例,一种工业机器人的数字孪生实训方法及系统,具体的操作步骤如下:
1)准备,所有设备已通电,准备工作就绪,待加工的原料已在料库内。
2)在监控系统软件中选择全流程实训,按启动按钮,此命令传送给实训台,送料单元开始工作;
3)监控系统组态软件随时接收实训台的数据和工业机器人的数据,实时监控实训台和工业机器人的运行状态,有意外情况时有声光报警并在计算机上弹出报警窗口;虚拟模型实时接收实训台的数据和工业机器人的数据,更新虚拟模型中零部件的属性和运动参数,进一步驱动模型运行,使虚拟系统和实体系统保持一致。
以下各步骤中实训台和工业机器人的运行状态数据实时在监控系统软件中显示,并实时发送给虚拟系统,驱动虚拟系统模型运行。
4)S7-1200PLC控制传送带将原料运送到机器人抓取原料位置;
5)S7-1200PLC通过滑台的执行机构控制滑台沿导轨将工业机器人运送到送料单元位置;
6)启动工业机器人更换夹爪工具,并移动到原料抓取位置,抓取原料;
7)S7-1200PLC通过滑台的执行机构控制滑台沿导轨将工业机器人运送到加工单元位置;
8)机器人松开夹具放下原料,更换切割工具,S7-1200PLC控制器控制切割机工作,机器人将原料旋转使切割机完成切割;
9)机器人将原料放到原料台,机器人更换打磨工具,S7-1200PLC控制器控制打磨机工作,完成打磨;
10)S7-1200PLC控制器控制抛光机工作,完成物料加工;
11)S7-1200PLC控制器控制滑台沿导轨将工业机器人运送到入库单元位置;
12)PLC控制器检测仓库物料放置的目标位置,若无空位,则在监控系统软件界面以报警方式通知操作员挪出仓储空位,当监测到有空位后报警窗口自动关闭;
13)机器人在空位处放入物料;
14)检测物料入库是否成功,成功后机器人回原点。
本实训系统不仅能进行虚拟仿真实训,也可进行物理实体实训,更可以进行虚实结合的实训。
本实训系统不仅能进行工业机器人的认知及使用、示教器的使用及编程、坐标系的转换、关节运动控制、直线运动控制、圆弧运动控制的实训,而且能进行工业机器人生产应用的实训,如送料单元运行控制、加工单元运行控制、仓储单元运行控制实训,以及在此基础上的功能扩展实训。
本实训系统不仅可以进行各单元的独立实训,或者几个的组合实训,也可以进行全流程的综合应用实训。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
- 一种工业机器人的数字孪生实训方法及系统
- 基于数字孪生的工业机器人制造系统可重构系统与方法