无轨道式水下隧洞、巡检装置和系统
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及水下隧洞巡检技术领域,具体而言,涉及一种无轨道式水下隧洞、巡检装置和系统。
背景技术
目前已建的引水隧洞,多采用圆形、马蹄形或城门洞形断面,在开挖与支护施工时较为方便。然而随着引水隧洞长年运行,水下光滑的隧洞断面在检修维护阶段的弊端逐渐显露出来,传统的巡检方式均采用放空后人工巡检,存在成本高、效率低、风险大等主要难题,部分隧洞为斜井段,人工无法进行巡检。随着近年来信息与测绘技术的发展,尤其是快速发展的人工智能技术,使得机器替人进行水下隧洞巡检成为当前巡检的有效方式。目前各隧洞运营管理单位与科研单位正全力开展机器人在水下隧洞中的应用研究,取得了较为丰硕的研究成果与示范效益。然而水下机器人巡检技术要求高、难度大,对复杂隧洞结构与水下恶劣环境适应性低,同时机器人在长隧洞中的定位精度不高,同时机器人需要专业人员控制,操控复杂,在常规运营管理单位推广难度大,也不利于水下隧洞的高频次巡检。
针对上述问题,相关研究人员曾尝试在隧洞中铺设轨道,采用轨道机器人进行巡检,但由于引水隧洞长年带水运行,容易造成钢轨锈蚀而无法正常往返,且铺设轨道容易影响正常过水断面,因此在水下隧洞中铺设轨道的方式较难实现。
发明内容
本发明的目的包括提供了一种无轨道式水下隧洞、巡检装置和系统,其不需要在隧洞中安装钢轨,不会影响过水断面,也利于巡检装置准确定位,并且巡检操作简单方便,更利于推广应用。
本发明的实施例可以这样实现:
第一方面,本发明提供一种无轨道式水下隧洞,无轨道式水下隧洞包括:
异形隧洞,异形隧洞的顶部开设有缺口凹槽,缺口凹槽沿异形隧洞的长度方向延伸;
两个限位部,设置在缺口凹槽的开口内、且位于缺口凹槽的相对两侧,限位部用于将巡检装置的部分限制在缺口凹槽内、以使巡检装置沿异形隧洞的长度方向滑动。
在可选的实施方式中,限位部的顶面为斜面,斜面从连接缺口凹槽壁面的一端向靠近缺口凹槽中心的一端高度逐渐降低。
第二方面,本发明提供一种无轨道式水下隧洞巡检装置,无轨道式水下隧洞巡检装置应用于前述实施方式的无轨道式水下隧洞,无轨道式水下隧洞巡检装置包括:
水平运动车,用于设置在缺口凹槽内、且支撑在限位部上;
竖向连接杆,竖向连接杆的一端铰接于水平运动车;
巡检舱体,铰接于竖向连接杆的另一端。
在可选的实施方式中,水平运动车包括:
水平支架;
至少两个水平车轮,安装在水平支架的相对两端,水平车轮用于沿缺口凹槽的壁面滑动;
至少两个竖向车轮,安装在水平支架的相对两端,竖向车轮用于支撑在限位部上、且沿限位部滑动。
在可选的实施方式中,水平运动车还包括:
驱动电机,安装在水平支架上,驱动电机与竖向车轮传动连接,驱动电机用于驱动竖向车轮转动。
在可选的实施方式中,水平运动车还包括:
弹性部,水平车轮通过弹性部安装到水平支架上,弹性部用于改变相对两侧的水平车轮的间距。
在可选的实施方式中,巡检舱体具有电动门,无轨道式水下隧洞巡检装置还包括:
绕线机,设置在巡检舱体内;
抵近机器人,放置在巡检舱体内,抵近机器人通过线缆连接到绕线机,打开电动门,可控制抵近机器人驶出巡检舱体。
在可选的实施方式中,竖向连接杆为电动伸缩杆。
在可选的实施方式中,无轨道式水下隧洞巡检装置还包括:
光源,安装在巡检舱体的外侧,光源用于照亮无轨道式水下隧洞;
摄像头,安装在巡检舱体的外侧,摄像头用于拍摄无轨道式水下隧洞内的画面;
三维声呐,安装在巡检舱体的外侧,三维声呐用于检测无轨道式水下隧洞的断面形状。
第三方面,本发明提供一种无轨道式水下隧洞系统,无轨道式水下隧洞系统包括:
前述实施方式的无轨道式水下隧洞;
前述实施方式的无轨道式水下隧洞巡检装置,无轨道式水下隧洞巡检装置用于巡检无轨道式水下隧洞。
本发明实施例提供的无轨道式水下隧洞、巡检装置和系统的有益效果包括:
1.在异形隧洞的顶部开设有缺口凹槽,并在缺口凹槽的开口内设置限位部,使巡检装置的部分限制在缺口凹槽内,并沿异形隧洞的长度方向滑动,不需要安装钢轨,不会影响过水断面,又能在隧洞有水或无水状态下巡检,不受隧洞运行状况影响,且能保证巡检过程的安全;
2.采用巡检装置沿缺口凹槽的长度方向滑动,有利于机器巡检的准确定位,稳定性与安全性更高;
3.使用范围更广,对于斜井段等异形隧洞也能适用,并且巡检操作简单方便,更利于推广应用。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
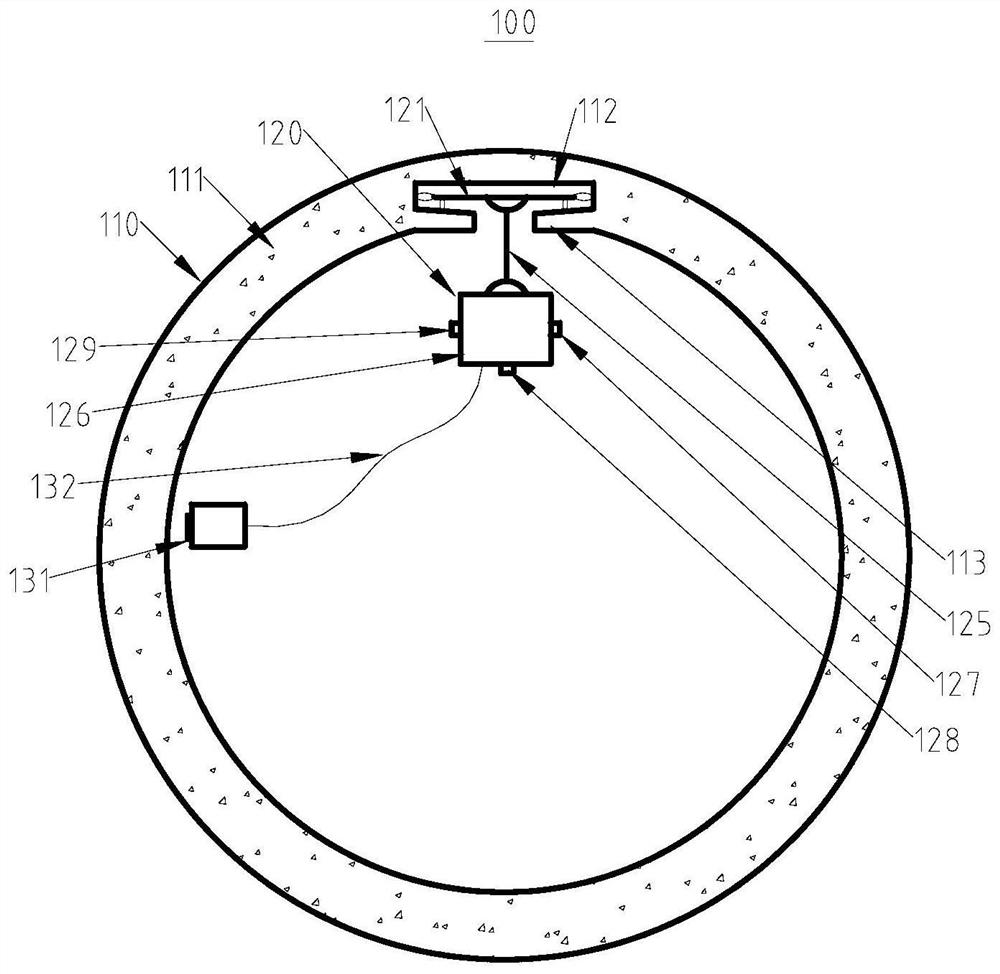
图1为本发明实施例提供的无轨道式水下隧洞系统的结构示意图;
图2为图1中无轨道式水下隧洞的结构示意图;
图3为水平运动车在缺口凹槽中的装配示意图;
图4为巡检舱体的内部结构示意图。
图标:100-无轨道式水下隧洞系统;110-无轨道式水下隧洞;111-异形隧洞;112-缺口凹槽;113-限位部;120-无轨道式水下隧洞巡检装置;121-水平运动车;122-水平支架;123-水平车轮;124-竖向车轮;125-竖向连接杆;126-巡检舱体;127-光源;128-摄像头;129-三维声呐;130-绕线机;131-抵近机器人;132-线缆。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
在本发明的描述中,需要说明的是,若出现术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,若出现术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
需要说明的是,在不冲突的情况下,本发明的实施例中的特征可以相互结合。
请参考图1,本实施例提供了一种无轨道式水下隧洞系统100(以下简称:“系统”),系统包括无轨道式水下隧洞110和无轨道式水下隧洞巡检装置120(以下简称:“巡检装置”),其中,巡检装置用于巡检无轨道式水下隧洞110。
请参阅图1和图2,无轨道式水下隧洞110包括异形隧洞111和两个限位部113,其中,异形隧洞111可以是斜井段,也可以是平井段,异形隧洞111的顶部开设有缺口凹槽112,缺口凹槽112沿异形隧洞111的长度方向延伸。其中,缺口凹槽112可以通过在隧洞施工建造过程中预留形成。
两个限位部113设置在缺口凹槽112的开口内、且位于缺口凹槽112的相对两侧,具体的,缺口凹槽112与两个限位部113可以形成T形槽。
限位部113用于将巡检装置的部分限制在缺口凹槽112内、以使巡检装置沿异形隧洞111的长度方向滑动。
优选地,限位部113的顶面为斜面,斜面从连接缺口凹槽112壁面的一端向靠近缺口凹槽112中心的一端高度逐渐降低。具体的,斜面相对于水平面的倾斜角度可以为3°~10°。这样,将限位部113的顶面设置为斜面,可以防止碎石或其它杂质卡持在缺口凹槽112内,避免巡检装置沿缺口凹槽112的运动受限。
在其它实施例中,缺口凹槽112与两个限位部113还可以形成L形槽,只要能够悬挂住巡检装置即可。
本实施例提供的无轨道式水下隧洞110的有益效果至少包括:
1.在异形隧洞111的顶部预留缺口凹槽112,再通过设置限位部113,形成巡检装置运动的通道,不需要安装钢轨,既能实现机器巡检的准确定位与高频次巡检,也不影响过水断面,又能在隧洞有水或无水状态下巡检,不受隧洞运行状况影响,且能保证巡检过程的安全;
2.使用范围更广,对于斜井段等异形隧洞111也能适用,并且巡检操作简单方便,更利于推广应用。
请参阅图1,巡检装置包括水平运动车121、竖向连接杆125和巡检舱体126,其中,水平运动车121用于设置在缺口凹槽112内、且支撑在限位部113上。竖向连接杆125的一端铰接于水平运动车121,巡检舱体126铰接于竖向连接杆125的另一端。
其中,竖向连接杆125的两端分别采用铰接的形式与水平运动车121和巡检舱体126连接,可以在水平运动车121的过程中,使巡检舱体126保持原本的水平状态。
竖向连接杆125可以选用电动伸缩杆。这样,通过控制电动伸缩杆的长度,可以调整巡检舱体126在洞内的高度,以便更加高效地利用巡检舱体126检测洞内的缺陷。
巡检舱体126的外侧还安装有光源127、摄像头128和三维声呐129,其中,光源127用于照亮无轨道式水下隧洞110,摄像头128用于拍摄无轨道式水下隧洞110内的画面,三维声呐129用于检测无轨道式水下隧洞110的断面形状。这样,利用光源127、摄像头128和三维声呐129可以对隧洞内部的整体环境进行初步扫描,发现隧洞结构异常位置与淤积情况。
请参阅图1和图3,水平运动车121包括水平支架122、至少两个水平车轮123和至少两个竖向车轮124,其中,至少两个水平车轮123安装在水平支架122的相对两端,水平车轮123用于沿缺口凹槽112的壁面滑动,至少两个竖向车轮124安装在水平支架122的相对两端,竖向车轮124用于支撑在限位部113上、且沿限位部113滑动。其中,水平车轮123和竖向车轮124可以均采用防水橡胶车轮,减少对缺口凹槽112的壁面和限位部113的磨损。
水平运动车121还包括驱动电机(图中未示出),驱动电机安装在水平支架122上,驱动电机与竖向车轮124传动连接,驱动电机用于驱动竖向车轮124转动。这样,采用竖向车轮124作为主动轮,可以利用巡检装置的重力,使竖向车轮124保持与限位部113接触,增大竖向车轮124与限位部113之间的摩擦力,保证竖向车轮124不会打滑或空转,能够稳定驱动水平运动车121运动。
驱动电机的电源可以利用搭载的电池或电缆提供,水平运动车121可以设置匀速运动模式,这样,根据运动的时长就可以准确计算出巡检装置的位置。
水平运动车121还包括弹性部(图中未示出),水平车轮123通过弹性部安装到水平支架122上,弹性部用于改变相对两侧的水平车轮123的间距。因为缺口凹槽112的宽度的精度并不高,水平运动车121在沿缺口凹槽112移动的过程中,相对两侧的水平车轮123可能难以同时接触到缺口凹槽112的壁面,或者,缺口凹槽112的宽度突然变小,可能导致相对两侧的水平车轮123卡滞在缺口凹槽112内,通过设置弹性部,能够改变相对两侧的水平车轮123的间距,使相对两侧的水平车轮123能够适应缺口凹槽112中宽度变化的路段,也使水平运动车121顺利通过缺口凹槽112中宽度变化的路段,提高运行的稳定性。
请参阅图4,巡检装置还包括绕线机130和抵近机器人131,其中,绕线机130设置在巡检舱体126内,巡检舱体126具有电动门,抵近机器人131放置在巡检舱体126内,抵近机器人131通过线缆132连接到绕线机130,打开电动门,可控制抵近机器人131驶出巡检舱体126。
请参阅图1,当需要抵近机器人131对无轨道式水下隧洞110内的情况进行详察时,控制巡检舱体126的电动门打开,控制抵近机器人131从巡检舱体126中驶出,到达缺陷位置进行详察。抵近机器人131可以采用在水中浮游的机器人,从而适应水下附着、无光、遮挡等复杂环境,实现高精度地信息采集。
本实施例提供的无轨道式水下隧洞110、巡检装置和系统的有益效果包括:
1.在异形隧洞的顶部开设有缺口凹槽112,并在缺口凹槽112的开口内设置限位部113,使巡检装置的部分限制在缺口凹槽112内,并沿异形隧洞111的长度方向滑动,不需要安装钢轨,不会影响过水断面,又能在隧洞有水或无水状态下巡检,不受隧洞运行状况影响,且能保证巡检过程的安全;
2.采用巡检装置沿缺口凹槽112的长度方向滑动,有利于机器巡检的准确定位,稳定性与安全性更高;
3.使用范围更广,对于斜井段等异形隧洞111也能适用,并且巡检操作简单方便,更利于推广应用;
4.巡检装置在水下巡检的过程中,可以采用抵近机器人131近距离测量与识别洞内的缺陷,巡检效果更佳。
以上,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
- 无轨道式水下隧洞、巡检装置和系统
- 无轨道式水下隧洞、巡检装置和系统