一种管道内翻边铲平设备及管道内翻边铲平方法
文献发布时间:2023-06-19 13:30:50
技术领域
本发明属于管道施工领域,具体涉及一种管道内翻边铲平设备及管道内翻边铲平方法。
背景技术
在市政工程领域,各种化学建材管道(如:聚乙烯管、聚丙烯管等)被广泛应用,管道的连接方式主要有法兰连接、热熔连接等,其中热熔连以其优良的连接效果,应用最为普遍。热熔对接连接后,连接处有沿管节圆周平滑对称的内外翻边。对于外翻边,可以直接使用切削工具进行切削即可,但是对于内翻边,目前市面上,却缺少相应的处理装置,导致无法实现有效的切削。
发明内容
本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种管道内翻边铲平设备,解决了难以对管道内翻边进行有效切削的问题。本发明还提出了一种管道内翻边铲平方法。
根据本发明第一方面实施例的管道内翻边铲平设备,包括:
行走机构,用于在管道内行走;
主体结构,设置于所述行走机构上;
转动机构,与所述主体机构连接,所述转动机构具有多个转动部,多个所述转动部共同用于带动所述主体结构在所述管道内转动;
切削装置,设置于所述转动机构上,用于切削所述管道的内翻边;
驱动装置,设置于所述主体结构中,用于驱动所述行走机构行走、驱动所述转动机构转动和驱动所述切削装置切削;
寻位装置,用于辅助确定所述管道的内翻边位置;
本地控制单元,设置于所述主体结构内,分别与所述驱动装置、所述寻位装置电性连接,并用于与遥控装置进行无线数据交互。
根据本发明实施例的管道内翻边铲平设备,至少具有如下技术效果:行走机构可以实现在管道内行走,通过转动机构可以实现在管道内转动,从可以让切削装置一次性完成对整个内翻边切除。通过寻位装置可以便于实现对内翻边位置的确定,从而可以避免对非内翻边区域的误切削,同时也可以保证对翻边区域的平整切削。通过遥控装置可以对本地控制单元远程无线控制,从而可以让用户直观的控制整个管道内翻边铲平设备的行走、转动和切削。本发明实施例的管道内翻边铲平设备解决了难以对管道内翻边部位切除的问题,且整体操作简单,方便,适合进行产业化推广。
根据本发明的一些实施例,所述行走机构包括:
行走固定座,用于承载所述主体结构;
多个行走轮,设置于所述行走固定座的下表面,用于在所述驱动装置的驱动下转动。
根据本发明的一些实施例,所述转动机构包括:
主动臂,其一端与所述主体结构连接,另一端设置有主动轮组;所述主动轮组用于在所述驱动装置的驱动下转动;
两个从动臂,每个所述从动臂的一端与所述主体结构连接,另一端上皆设置有从动轮组;所述主动臂和两个所述从动臂共同用于支撑所述主体结构在管道内转动。
根据本发明的一些实施例,所述主动轮组包括两个主动轮,两个所述主动轮同轴设置,用于在所述驱动装置的驱动下转动;
所述切削装置包括:
刀片底座,与所述主动轮组同轴设置且位于两个所述主动轮之间,用于在所述驱动装置的驱动下转动;所述刀片底座上设置有多个刀片固定部;
多个刀片,分别通过多个所述刀片固定部设置在所述刀片底座上;
刀盘基座,设置于所述主动臂上,用于转动支撑所述刀片底座、所述主动轮组。
根据本发明的一些实施例,所述刀片固定部为设置于所述刀片底座上的固定螺孔,所述刀片上设置有安装通孔;所述刀片通过螺栓、所述固定螺孔和所述安装通孔可拆卸固定在所述刀片底座上。
根据本发明的一些实施例,每个所述从动臂皆包括:
从动主臂,其一端与所述主体结构连接,其内具有伸缩槽;
伸缩臂,其一端设置于所述伸缩槽内,用于在所述驱动装置的驱动下实现伸缩;
所述从动轮组,设置于所述伸缩臂的另一端。
根据本发明的一些实施例,所述寻位装置包括:
光源,设置于所述主体结构上,并与所述本地控制单元电性连接;
影像采集装置,设置于所述主体结构上,并与所述本地控制单元电性连接。
根据本发明的一些实施例,所述遥控装置包括:
无线通讯模块,与所述本地控制单元无线连接;
显控单元,与所述无线通讯模块电性连接。
根据本发明第二方面实施例的管道内翻边铲平方法,包括以下步骤:
启动行走机构、寻位装置;
通过寻位装置确定管道的内翻边位置;
使所述行走机构持续前行,直至所述切削装置对准所述管道的内翻边位置;
控制转动机构和所述切削装置将所述管道的内翻边位置切削平整;
停止所述寻位装置,控制所述行走机构持续后退,直至退出所述管道。
根据本发明实施例的管道内翻边铲平方法,至少具有如下技术效果:通过启动并控制行走机构和寻位装置可以实现在管道内行走以及确定需要具体进行内翻边切除的部位,在确定内翻边位置后,进而可以通过控制转动机构和切削装置一次性完成对整个内翻边切除。本发明实施例的管道内翻边铲平方法解决了难以对管道内翻边部位切除的问题,且整体操作简单,方便,适合进行产业化推广。
根据本发明的一些实施例,所述寻位装置包括光源和影像采集装置:所述光源设置于所述主体结构上并与所述本地控制单元电性连接;所述影像采集装置设置于所述主体结构上,并与所述本地控制单元电性连接;
所述通过寻位装置确定管道的内翻边位置,包括以下步骤:
开启所述光源,以使得所述影像采集装置可以采集管道内的管道影像,其中,所述影像采集装置采集的所述管道影像会传输到本地控制单元;
获取所述本地控制单元接收的所述管道影像,以使得用户可以根据所述管道影像确认所述管道的内翻边位置。
本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
本发明的上述或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
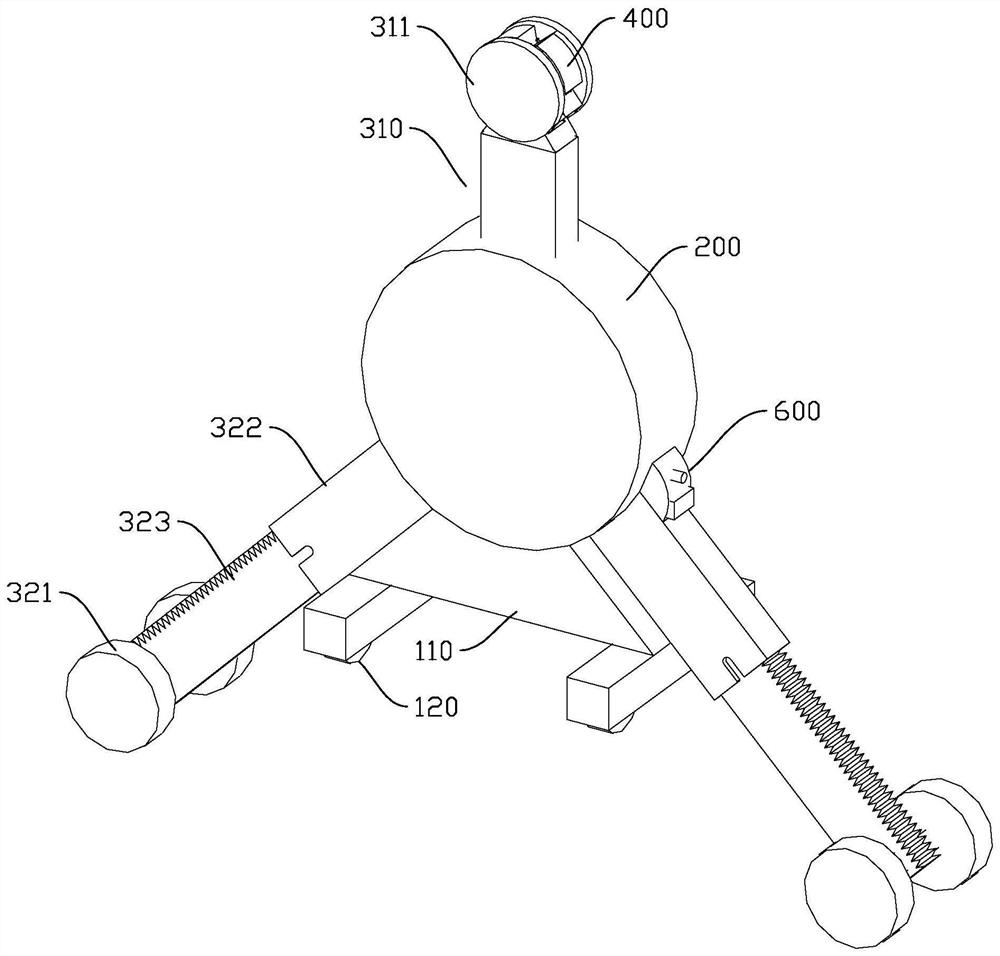
图1是本发明实施例的管道内翻边铲平设备的立体结构简图;
图2是本发明实施例的切削装置的结构示意图;
图3是本发明实施例的管道内翻边铲平设备的工作示意图;
图4是本发明实施例的管道内翻边铲平设备的电气系统框图。
附图标记:
行走机构100、行走固定座110、行走轮120、
主体结构200、
转动机构300、主动臂310、主动轮组311、从动臂320、从动轮组321、从动主臂322、伸缩臂323、
切削装置400、刀片底座410、刀片420、刀盘基座430、
驱动装置500、
寻位装置600、
本地控制单元700、
遥控装置800。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
下面参考图1至图4描述根据本发明第一方面实施例的管道内翻边铲平设备。
根据本发明实施例的管道内翻边铲平设备,包括行走机构100、主体结构200、转动机构300、切削装置400、驱动装置500、寻位装置600、本地控制单元700。
行走机构100,用于在管道内行走;
主体结构200,设置于行走机构100上;
转动机构300,与主体机构连接,转动机构300具有多个转动部,多个转动部共同用于带动主体结构200在管道内转动;
切削装置400,设置于转动机构300上,用于切削管道的内翻边;
驱动装置500,设置于主体结构200中,用于驱动行走机构100行走、驱动转动机构300转动和驱动切削装置400切削;
寻位装置600,用于辅助确定管道的内翻边位置;
本地控制单元700,设置于主体结构200内,分别与驱动装置500、寻位装置600电性连接,并用于与遥控装置800进行无线数据交互。
参考图1至图4,主体结构200设置在行走机构100上,进而可以通过行走机构100带动主体结构200在管道内前行和后退。主体结构200是安装基础,转动机构300、驱动装置500、寻位装置600、本地控制单元700都可以通过主体结构200实现安装固定,切削装置400则依托转动机构300实现安装。
转动机构300设置在主体结构200上,并具有多个转动部,多个转动部之间存在足够的角度,通常角度要大于90度。当转动部设置为3个时,3个转动部之间的角度设置为120度为宜,从而可以保证的转动稳定性。
切削装置400设置在转动机构300上,可以执行切削动作,从而可以实现对内翻边进行有效的切削。在转动机构300开始转动时,同步启动切削装置400,则可以实现对管道内翻边进行整圈的切除。
管道通常较为狭小且黑暗,因此通过人力很难直接看到管道内翻边位置,通过寻位装置600可以确定管道内翻边位置,从而使得切削装置400可以准确对管道内翻边进行切削。
遥控装置800可以发出多种操作指令到本地控制单元700,例如:前进、后退、工作等等。本地控制单元700在接收到操作指令后,便会执行相应的操作,以实现对行走机构100、转动机构300、切削装置400、寻位装置600的远程控制。此外,需要说明,驱动装置500是驱动行走机构100、转动机构300、切削装置400进行工作的基础,用于提供动力来源。
根据本发明实施例的管道内翻边铲平设备,行走机构100可以实现在管道内行走,通过转动机构300可以实现在管道内转动,从可以让切削装置400一次性完成对整个内翻边切除。通过寻位装置600可以便于实现对内翻边位置的确定,从而可以避免对非内翻边区域的误切削,同时也可以保证对翻边区域的平整切削。通过遥控装置800可以对本地控制单元700远程无线控制,从而可以让用户直观的控制整个管道内翻边铲平设备的行走、转动和切削。本发明实施例的管道内翻边铲平设备解决了难以对管道内翻边部位切除的问题,且整体操作简单,方便,适合进行产业化推广。
在发明的一些实施例中,参考图1、图3,行走机构100包括:行走固定座110、多个行走轮120。行走固定座110,用于承载主体结构200;多个行走轮120,设置于行走固定座110的下表面,用于在驱动装置500的驱动下转动。通过行走固定座110可以实现对主体结构200的安装固定,从而可以通过行走轮120带动基于主体结构200进行安装的所有结构的行走。
在发明的一些实施例中,参考图1、图3,转动机构300包括:主动臂310、两个从动臂320。主动臂310,其一端与主体结构200连接,另一端设置有主动轮组311;主动轮组311用于在驱动装置500的驱动下转动;两个从动臂320,每个从动臂320的一端与主体结构200连接,另一端上皆设置有从动轮组321;主动臂310和两个从动臂320共同用于支撑主体结构200在管道内转动。主动臂310和两个从动臂320构成了稳定的转动结构,每两个臂之间的角度都需要大于90度,通常会设置在120度为宜。主动臂310上的主动轮组311可以在驱动装置500的驱动下实现主动转动,从而可以带动两个从动臂320上的从动轮组321实现被动转动,最终可以带动整个主体结构200进行同步转动。这里需要说明,为了保证能够实现平稳的转动,主动轮组311和从动轮组321中轮子在伸展到管道内翻边位置时,会分布在内翻边的两侧。
在发明的一些实施例中,参考图1、图2,主动轮组311包括两个主动轮,两个主动轮同轴设置,用于在驱动装置500的驱动下转动;切削装置400包括:刀片底座410、刀盘基座430、多个刀片420。刀片底座410,与主动轮组311同轴设置且位于两个主动轮之间,用于在驱动装置500的驱动下转动;刀片底座410上设置有多个刀片固定部;多个刀片420,分别通过多个刀片固定部设置在刀片底座410上;刀盘基座430,设置于主动臂310上,用于转动支撑刀片底座410、主动轮组311。刀盘基座430设置在主动臂310上,可以为刀片底座410和主动轮提供转动基础,进而使得刀片底座410和主动轮可以在驱动装置500的驱动下实现转动,从而能够完成在管道内的转动,同时也可以带动刀片420进行切削。
在发明的一些实施例中,参考图2,刀片固定部为设置于刀片底座410上的固定螺孔,刀片420上设置有安装通孔;刀片420通过螺栓、固定螺孔和安装通孔可拆卸固定在刀片底座410上。刀片底座410上设置固定螺孔,刀片420上开设安装通孔,进而可以使用螺栓直接将刀片420固定在固定螺孔上。在需要进行刀片420更换时,通过螺栓螺孔固定结构,也可以实现快速的更换。
在发明的一些实施例中,参考图1、图3,每个从动臂320皆包括:从动主臂322、伸缩臂323、从动轮组321。从动主臂322,其一端与主体结构200连接,其内具有伸缩槽;伸缩臂323,其一端设置于伸缩槽内,用于在驱动装置500的驱动下实现伸缩;从动轮组321,设置于伸缩臂323的另一端。伸缩臂323的伸缩控制由驱动装置500实现,可以采用丝杆伸缩结构完成对伸缩臂323的伸缩控制,也可以直接采用伸缩电机完成对伸缩臂323的伸缩控制。在对伸缩臂323进行伸缩控制时,可以设置弹簧机构完成辅助伸缩。从动轮组321设置在伸缩臂323远离主体结构200的一端,从而可以在伸缩臂323伸展后与管道内壁进行稳定接触。从动轮组321同样包括两个从动轮,两个从动轮进行同轴设置,且两者之间的间距需要大于内翻边的宽度,以保证能够稳定完成转动,同理,主动轮组311中的两个主动轮的宽度也需要大于内翻边的宽度。
这里需要说明,如图1、图3所示,在需要使用行走机构100进行行走时,可以将伸缩臂323收缩,在行走到内翻边位置时,再控制伸缩臂323进行伸展即可。这样设置皆可以保证行走的需求,同样也可以保证切削的需求,且不会导致行走机构100和转动机构300之间相互干扰。
在发明的一些实施例中,寻位装置600包括:光源、影像采集装置。光源,设置于主体结构200上,并与本地控制单元700电性连接;影像采集装置,设置于主体结构200上,并与本地控制单元700电性连接。光源可以保证管道的亮度,从而使得影像采集装置可以采集到清晰的管道影像,通过本地控制单元700可以进一步将管道影像传输到遥控装置800进行实时显示,从而便于施工人员根据管道影像完成对内翻边的切削。
在发明的一些实施例中,寻位装置600还可以采用磁场强度检测传感器和磁场发射装置。磁场强度检测传感器设置在主体结构200上并与本地控制单元700电性连接,磁场发射装置通过施工人员直接布置在管道外表面并与管道内翻边位置对应。在行走机构100前行时,通过磁场强度检测传感器可以检测到磁场强度的变化,在行走至管道内翻边位置时,所检测到的磁场强度是最大的,从而完成切削装置400与管道内翻边位置的对应,以便切削装置400实现切削。这里需要说明的是,采用磁场强度检测传感器和磁场发射装置进行寻位,可以实现更好的实现的自动化定位管道内翻边位置,且本地控制单元700需要传输的数据量较小,可以有效的降低成本。
在发明的一些实施例中,寻位装置600还可以采用红外摄像头和热源。红外摄像头设置在主体结构200上并与本地控制单元700电性连接,热源通过施工人员直接布置在管道外表面并与管道内翻边位置对应。红外摄像头在采集红外影像时,热源会是一个十分突出的亮点,从而只需要确定亮点在红外影像的位置,即可确定是否行走到内翻边位置。具体的,假设红外影像中,亮点处于最中间时,切削装置400对转内翻边位置,则只需要控制行走机构100前行至红外影像为该状态即可完成切削装置400与管道内翻边位置的对应,以便切削装置400实现切削。这里需要说明的是,采用红外摄像头和热源进行寻位,同样可以实现更好的实现的自动化定位管道内翻边位置,且本地控制单元700需要传输的数据量相较于可将光图像而言更小,可以有效的降低成本,保证数据处理的速度。
这里需要说明,主体机构200上可以始终安装影像采集装置,便于在遥控装置800一侧查看实际的内翻边切除效果。
在发明的一些实施例中,遥控装置800包括:无线通讯模块、显控单元。无线通讯模块,与本地控制单元700无线连接;显控单元,与无线通讯模块电性连接。无线通讯模块可以实现与本地控制单元700的无线通信,为了实现无线通讯,会在本地控制单元700一侧安装与遥控装置800内无线通信模块型号相同的无线通信模块。显控单元可以采用平板电脑,或者采用控制器、显示屏、按键组合的结构实现可视化操作。在发明的一些实施例中,无线通讯模块可以采用WiFi模块、ZigBee模块或蓝牙模块等等。
在发明的一些实施例中,本地控制单元700的核心控制单元可以采用单片机、DSP或ARM。具体采用什么类型的处理器,可以根据实际需要传输的管道影像的数据量来进行确定。在影像数据传输量较大时,可以采用DSP作为核心控制单元。
这里需要说明,驱动装置500中包括了蓄电池单元、以及多种传动机构。从而可以利用蓄电池中的电能,并通过多种传动机构分别驱动行走机构100、转动机构300、切削装置400工作,并可以为寻位装置600、本地控制单元700进行供电。
根据本发明第二方面实施例的管道内翻边铲平方法,包括以下步骤:
启动行走机构100、寻位装置600;
通过寻位装置600确定管道的内翻边位置;
使行走机构100持续前行,直至切削装置400对准管道的内翻边位置;
控制转动机构300和切削装置400将管道的内翻边位置切削平整;
停止寻位装置600,控制行走机构100持续后退,直至退出管道。
参考图1至图4,主体结构200设置在行走机构100上,进而可以通过行走机构100带动主体结构200在管道内进行前行和后退。主体结构200是安装基础,转动机构300、驱动装置500、寻位装置600、本地控制单元700都可以通过主体结构200实现安装固定,切削装置400则依托转动机构300实现安装。转动机构300设置在主体结构200上,并具有多个转动部,多个转动部之间存在足够的角度,通常角度差要大于90度。当转动部设置为3个时,3个转动部之间的角度设置为120度为宜,从而可以最好的保证的转动稳定性。切削装置400设置在转动机构300上,可以执行切削动作,从而可以实现对内翻边进行有效的切削。在转动机构300开始转动时,同步启动切削装置400,则可以实现对管道内翻边进行整圈的切除。管道通常较为狭小且黑暗,因此通过人力很难直接看到管道内翻边位置,通过寻位装置600则可以提供确定管道内翻边位置的基础,从而使得切削装置400可以准确对管道内翻边进行切削。
在需要进行内翻边铲平时,会通过遥控装置800发送前进操作指令到本地控制单元700,从而通过本地控制单元700启动行走机构100、寻位装置600;通过寻位装置600检测到内翻边位置后,便可以通过遥控装置800发送工作操作指令到本地控制单元700,从而启动切削装置400进行切削。切削完成后,通过遥控装置800控制行走机构100后退,完成一次内翻边切削。
根据本发明实施例的管道内翻边铲平方法,通过启动并控制行走机构100和寻位装置600可以实现在管道内行走以及确定需要具体进行内翻边切除的部位,在确定内翻边位置后,进而可以通过控制转动机构300和切削装置400一次性完成对整个内翻边切除。本发明实施例的管道内翻边铲平方法解决了难以对管道内翻边部位切除的问题,且整体操作简单,方便,适合进行产业化推广。
在本发明的一些实施例,寻位装置600包括光源和影像采集装置:光源设置于主体结构200上并与本地控制单元700电性连接;影像采集装置设置于主体结构200上,并与本地控制单元700电性连接;
通过寻位装置600确定管道的内翻边位置,包括以下步骤:
开启光源,以使得影像采集装置可以采集管道内的管道影像,其中,影像采集装置采集的管道影像会传输到本地控制单元700;
获取本地控制单元700接收的管道影像,以使得用户可以根据管道影像确认管道的内翻边位置。
通过将影像采集装置采集的管道内的管道影像传输到遥控装置800一端,从而可以让遥控装置800一端的施工人员观察当前位置,从而可以让切削装置400最终能够对准内翻边位置,便于后续进行切除。
在发明的一些实施例中,寻位装置600还可以采用磁场强度检测传感器和磁场发射装置。磁场强度检测传感器设置在主体结构200上并与本地控制单元700电性连接,磁场发射装置通过施工人员直接布置在管道外表面并与管道内翻边位置对应。
在需要使用磁场强度检测传感器和磁场发射装置进行内翻边位置确定时,可以通过以下步骤实现:
将磁场发射装置布置在管道外表面并与管道内翻边位置对应;
本地控制单元700在接收到遥控装置800发送的寻位指令后,启动行走机构100和磁场强度检测传感器;
通过磁场强度检测传感器持续检测持续采集管道内磁场强度值,并将该磁场强度值传输到遥控装置800一端进行显示;
确定待切削管道区间内的磁场强度值最大时的目标位置,将控制行走机构100停止在目标位置。
这里需要说明,磁场强度检测传感器越靠近磁场发射装置则磁场强度值越大,因此,在行走机构100前行过程中,会经历一个磁场由小至大并由大至小的过程,最大时,则是对应管道内翻边位置。这里需要说明的是,采用磁场强度检测传感器和磁场发射装置进行寻位,可以实现更好的实现的自动化定位管道内翻边位置,且本地控制单元700需要传输的数据量较小,可以有效的降低成本。
在发明的一些实施例中,寻位装置600还可以采用红外摄像头和热源。红外摄像头设置在主体结构200上并与本地控制单元700电性连接,热源通过施工人员直接布置在管道外表面并与管道内翻边位置对应。
在需要使用红外摄像头和热源进行内翻边位置确定时,可以通过以下步骤实现:
将热源布置在管道外表面并与管道内翻边位置对应;
本地控制单元700在接收到遥控装置800发送的寻位指令后,启动行走机构100和红外摄像头;
通过红外摄像头持续检测持续采集管道内红外图像,并将该红外图像传输到遥控装置800一端进行显示;
根据管道内红外图像确定行走机构100的停止行走位置。
红外摄像头在采集红外影像时,热源会是一个十分突出的亮点,从而只需要确定亮点在红外影像的位置,即可确定是否行走到内翻边位置。具体的,假设红外影像中,亮点处于最中间时,切削装置400对转内翻边位置,则只需要控制行走机构100前行至红外影像为该状态即可完成切削装置400与管道内翻边位置的对应,以便切削装置400实现切削。这里需要说明的是,采用红外摄像头和热源进行寻位,同样可以实现更好的实现的自动化定位管道内翻边位置,且本地控制单元700需要传输的数据量相较于可将光图像而言更小,可以有效的降低成本,保证数据处理的速度。这里需要说明,主体机构200上可以始终安装影像采集装置,便于在遥控装置800一侧查看实际的内翻边切除效果。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
尽管上述结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
- 一种管道内翻边铲平设备及管道内翻边铲平方法
- 食用菌塑料袋内套袋自动翻边器及翻边方法