一种自适应滤波算法迭代状态的判断方法
文献发布时间:2023-06-19 13:45:04
技术领域
本发明涉及信号处理技术领域,更具体地说是一种自适应滤波算法迭代状态的判断方法。
背景技术
信号处理的主要任务是解决噪声中信号的提取问题,在输入信号受到噪声干扰时,输出端仍需将信号精准重现,同时最大程度的抑制噪声影响,上述问题可通过自适应滤波器解决。自适应滤波器是以最小均方误差为准则的最佳滤波器,能够自动调节其自身单位脉冲响应以达到最。自适应滤波包括滤波器和算法两部分,滤波器为完成滤波任务的硬件平台,算法用于调整滤波器脉冲响应或传递函数。
对于这种自适应滤波系统,需对迭代状态进行实时监测,确认系统是否发散,影响后续进程。现有的迭代状态判断方法仅以迭代误差作为参考,通过误差计算结果判断系统迭代状态。但是,迭代误差大小与期望响应大小高度相关,即系统收敛状态相同的情况下,迭代误差与期望响应的比值相同。若期望响应本身较大,即便系统收敛状态良好,迭代误差仍有可能较大,这将导致系统迭代状态判断的标准难以界定,从而无法准确判断系统迭代状态。
发明内容
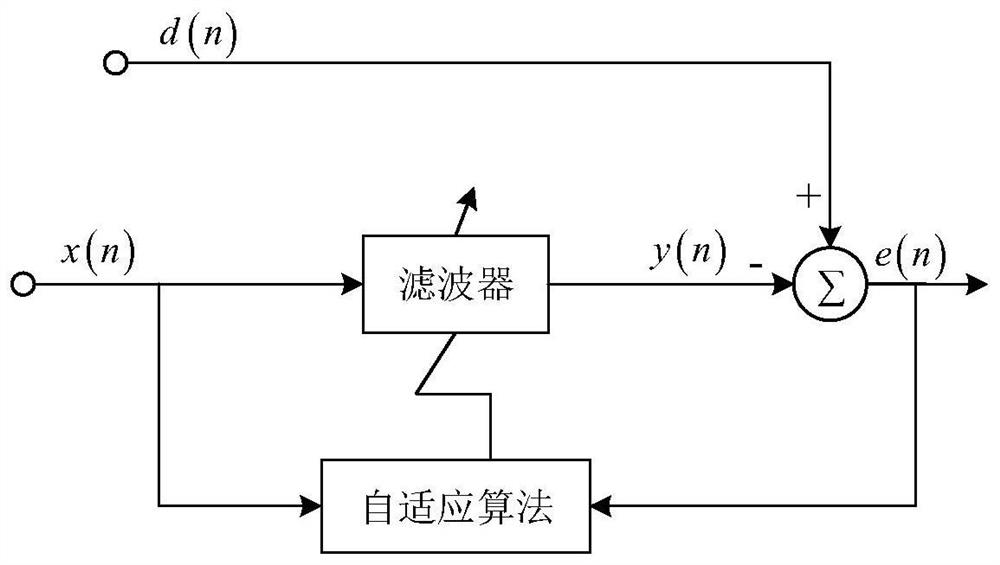
现有自适应滤波系统结构如图1所示,x(n)为输入信号,d(n)为期望响应,y(n)为输出响应,e(n)为迭代误差。
现有的迭代状态判断方法以迭代误差e(n)作为参考,通过误差计算结果判断系统迭代状态。当系统收敛状态相同时,迭代误差e(n)与期望响应d(n)的比值相同。也就是说,当期望响应d(n)较大时,即便系统收敛状态良好,迭代误差e(n)的计算结果仍有可能较大,这将导致系统迭代状态判断的标准难以界定,从而无法准确判断系统迭代状态。
针对上述问题,重新提出一种自适应滤波算法迭代状态的判断方法。
一种自适应滤波算法迭代状态的判断方法,具体如下:
对于某时刻,输入信号为x(n),期望响应为d(n),x(n)经过滤波器后的输出响应为y(n),两者之差e(n)为迭代误差,
设滤波器估计模型为
式(1)中,x(n)=(x(n)…x(n-L+1))
当迭代误差期望为零,即E{e(n)}=0时,有y(n)=d(n),此时滤波器迭代状态达到最佳;
令J(n)=e
令式(2)对
设算法迭代系数为μ,则有
当系统稳定收敛时,
令
对式(5)取矢量二范数,有
对式(6)进行级运算,有
V(n)=10·log
可以通过式(7)的计算结果准确判断系统迭代状态,判断标准如下:
算法迭代稳定后,V(n)<0,则算法收敛,V(n)>0,则算法发散。
式(5)、(6)期望与范数的计算顺序可以交换且判断标准不变。
本发明的技术效果和优点:
1、自适应滤波系统的迭代状态仍可以通过迭代误差判断,本发明提出的方法判断结果更准确,且收敛与发散的界定标准非常明确,误差较小。
2、该判断方法同样适用于其他过程复杂的自适应滤波系统,适应性强。
附图说明
图1为自适应滤波系统框图。
具体实施方式
下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例一
一种自适应滤波算法迭代状态的判断方法,具体如下:
首先,针对自适应滤波算法原理进行梳理。
根据图1,对于某时刻,输入信号为x(n),期望响应为d(n),x(n)经过滤波器后的输出响应为y(n),两者之差e(n)为迭代误差。
设滤波器估计模型为
式(1)中,x(n)=(x(n)…x(n-L+1))
当迭代误差期望为零,即E{e(n)}=0时,有y(n)=d(n),此时滤波器迭代状态达到最佳。
令J(n)=e
令式(2)对
设算法迭代系数为μ,则有
当系统稳定收敛时,
令
对式(5)取矢量二范数,有
对式(6)进行级运算,有
V(n)=10·log
最后,可以通过式(7)的计算结果准确判断系统迭代状态,判断标准如下:
算法迭代稳定后,V(n)<0,则算法收敛,V(n)>0,则算法发散。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种自适应滤波算法迭代状态的判断方法
- 一种基于红外热成像的仓储状态判断系统及判断方法