一种协同康复训练机器人
文献发布时间:2023-06-19 13:51:08
技术领域
本发明涉及医疗器械技术领域,尤其是一种协同康复训练机器人。
背景技术
随着我国的出生率与死亡率的逐年降低,社会的老龄化持续加剧,老年人的健康问题引起广泛的社会的关注。其中得了中风即脑卒中的老年人经常会出现很多关于神经功能的缺损的表现。在其中的缺损表现中,偏瘫后遗症和运动障碍后遗症又是最为常见的。这个时候患者的手功能障碍的临床表现往往是手部的屈曲挛缩,由于手的屈肌张力是占优势的,而导致指间的关节和掌指的关节伸展很困难,所以患者就容易丧失握持、侧捏、和对掌及对指等精细的运动功能。但是得了中风的这些老年人中的绝大部分都是可以训练恢复的。在中风的初期如果对老年人就已经采取了康复训练的话,是可以大大的增加他们的自理能力,并且可以更好的降低成为手部残疾的风险。
因此在初期中风患者中,患者的家人大多选择主动帮助患者进行辅助康复训练,对于传统人工辅助康复训练,由于康复医师无法量化手指的康复训练的程度,往往通过经验对病人进行康复训练,因此治疗的时间长;效果有限等。而目前为止由于社会市场上十分的缺乏康复医疗的设备和资源,并且手部功能康复机器人康复训练运动模式及训练过程比较的单一。
因此设计一款可以帮助手指/手腕康复的训练机器人,协助中风患者或者手指手腕不灵活的人进行手指手腕的康复训练。
发明内容
本发明要解决的技术问题是:提供一种能够在一定程度上让患者摆脱运动范围的限制,对于患者来说是非常具有安全性的,腕部分具有三自由度的辅助运动机构,满足要求手腕康复训练要求的协同康复训练机器人。
本发明解决其技术问题所采用的技术方案是:一种协同康复训练机器人,用于手指和/或腕部的协同康复训练,辅助回复手部功能的康复机器人,包括底座,底座上安装有升降机构,其上安装有手腕康复训练机构,用以驱动手指康复训练机构和手腕康复训练机构上下方向调节和左右方向调节,手指康复训练机构,用以穿戴在患者手部,通过牵引式的手指完成杆机构带动手指运动,手腕康复训练机构,其上安装有手指康复训练机构,用以放置腕部,并带动腕部在三个自由度上进行辅助运动,训练者面对训练机器人坐在座椅上,将手指和腕部放置在手指康复训练机构和手腕康复训练机构,调节升降机构和手指康复训练机构,开始进行手指、腕部协调康复训练。
进一步的,手指康复训练机构包括手指完成杆机构、手指凸轮推杆滑轨机构以及手板,所述手板为前后空心结构,手板的左侧或右侧板面上开设有供大拇指伸出的开孔,该开孔的开设方向根据左、右手确定,手板的板面上安装有手指凸轮推杆滑轨机构,手指凸轮推杆滑轨机构根据手型分布,手指凸轮推杆滑轨机构的前端安装有手指完成杆机构。
进一步的,手腕康复训练机构包括前腕节、旋转腕、皮带电机轮机构、第二自由度电机以及第三自由度电机,所述皮带电机轮机构安装在横板上,横板为带弧形卡头的横板,横板通过弧形卡槽连接有旋转腕,旋转腕的下部通过销钉安装有旋转腕底板,第二自由度电机的输出端上从右往左依次安装有第二腕节和前腕节,前腕节的左侧安装有第一腕节,前腕节与旋转腕之间通过第一腕节和第二腕节连接,第二自由度电机驱动前腕节与第一腕节和第二腕节作相对旋转运动,旋转角度为0~90°;皮带电机轮机构转动,驱动前腕节和旋转腕旋转,用以控制手腕的旋转,旋转角度为180°;皮带电机轮机构通过第一横梁吊装在升降机构的横杆上,第三自由度电机通过旋横梁安装在升降机构的横杆上,第三自由度电机的输出端安装皮带电机轮机构,第三自由度电机转动,驱动整个手腕康复训练机构旋转,旋转角度为0~360°。
进一步的,升降机构包括型材箱体组件、安装在所述型材箱体组件内的滚珠丝杠机构,滚珠丝杠机构的两侧安装有导轨,型材箱体组件的箱体表面开设有与导轨相对应设置的滑槽,滚珠丝杠机构上的滑块上安装有升降台组件,滚珠丝杠机构的丝杠上安装有手轮,并通过手轮驱动滚珠丝杠机构上下移动;升降台组件上穿插有横杆,横杆上安装有手腕康复训练机构和手指康复训练机构,横杆上开设有若干第二调节孔,手腕康复训练机构通过销孔配合手动调节左右方向。
进一步的,手指完成杆机构包括指套、连杆、曲连杆以及弧形架,所述指套与训练者的手指相连套合,指套通过连杆与曲连杆的一端连接,曲连杆的另一端安装有弧形架,弧形架的另一端与手指凸轮推杆滑轨机构连接。
进一步的,手指凸轮推杆滑轨机构包括滑轨组件、第一电机以及凸轮,所述滑轨组件上安装有在其上移动的固定板,固定板的上方安装有方形轨道,第一电机安装在固定板的下方,第一电机的输出端安装有凸轮,方形轨道内安装有顶杆,顶杆位于凸轮的上方,第一电机驱动凸轮转动,带动顶杆上下移动,顶杆上安装有上顶杆,上顶杆与手指完成杆机构中的弧形架连接。
进一步的,皮带电机轮机构包括第一自由度电机、安装在所述横板上的动力轮,所述第一自由度电机安装在横板上,第一自由度电机的输出端安装有电机皮带轮,电机皮带轮与动力轮之间通过皮带连接,动力轮与旋转腕接触,第一自由度电机转动,驱动动力轮带动旋转腕和旋转腕旋转。
进一步的,曲连杆的杆面上开设有若干第一调节孔,弧形架套设在曲连杆上,并通过销安装,用以通过销孔配合手动调节曲连杆和弧形架的配合位置以调节手指置放的长度。
进一步的,底座的底面四角上均安装有万向轮。
进一步的,手板的前端板面上安装有连接件,弧形架的中间段通过轴连接,轴的两端与连接件之间均安装有轴承。
本发明的有益效果是,解决了背景技术中存在的缺陷,
1、本发明的忽略指套带动指尖的时候远指端关节运动幅度将五根手指均等同看为大拇指,省略其他手指一个自由度,采用相同的手指完成杆机构与手指凸轮推杆滑轨机构结合的手指康复训练机构;
2、本发明的手指康复训练机构主要由手指完成杆机构与手指凸轮推杆滑轨机构组合的机构组成,能够在一定程度上让患者摆脱运动范围的限制,对于患者来说是非常具有安全性的,在结构上十分有特点;
3、本发明中的指套和患者的手指相连套合,然后第一电机驱动手指完成杆机构对手指进行训练运动,此外对于手指部分的控制都是每根手指需要一个微型电机独立控制,功能需求上都能满足对手指进行恢复;
4、本发明中的手指完成杆机构可以调节手指长度,还可以和前面的连杆、指套配合以来实现更大的弯曲角度,通过仿真,机构能达到的角度是0~60°,比正常人的手指弯曲程度角度小,但是考虑到如果在康复训练中强制达到最大化,会损伤人的手手指近指端关节;
5、本发明中的手腕部分具有三自由度的辅助运动机构,首先是第一个自由度,手腕第一自由度可以旋转180°,控制手腕的旋转;第二个自由度是前腕节在前腕节旁边第二自由度电机控制下与两个腕节进行相对旋转运动,可以旋转的角度是0~90°,手腕正是放在前腕节与腕节处,控制手腕的上摆动;手腕的第三个自由度通过旋转前面的整体以来控制第三个自由度,需要先进行第二自由度的调节,使腕节前腕节顺时针旋转0~90°中的一定角度,然后再在第三自由度控制电机的控制下,进行控制,能旋转的角度是0~360°,满足要求手腕康复训练要求;
6、本发明中的指套和连杆配合轴,轴套是用来防止轴的轴向窜动,轴套的固定是通过销与指套固定,轴套相对指套静止,但指套还是可以和连杆相对转动的;
7、本发明中的手指和手腕康复训练机构可通过摇手旋转控制滚珠丝杠机构带动和滑块固定在一起的升降台上下移动,用经过打孔等处理过的横杆通过销轴进行手动调节左右方向,可以满足不同身高、臂长等人群,具有适应范围广的特性;底座下安装的可自锁万向轮上,移动很方便,使万向轮锁住,康复训练时具有稳定性。
附图说明
下面结合附图和实施例对本发明进一步说明。
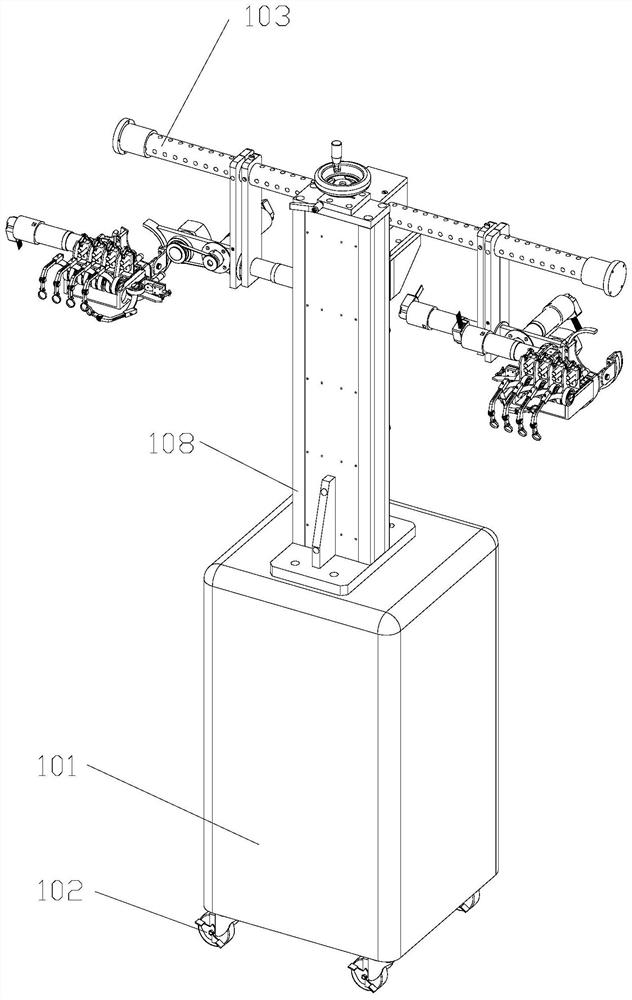
图1是本发明的优选实施例的结构示意图;
图2是图1另一方向的结构示意图;
图3是本发明手指康复训练机构与手腕康复训练机构装配后的结构示意图;
图4是本发明手指康复训练机构的结构示意图;
图5是本发明手指完成杆机构的结构示意图;
图6是本发明手指凸轮推杆滑轨机构的结构示意图;
图7是本发明手腕康复训练机构的结构示意图;
图8是本发明皮带电机轮机构的结构示意图;
图9是本发明升降机构的剖视图;
图中:101.底座;102.万向轮;103.横杆;106.手轮;108.型材箱体组件;109.升降台组件;110.滚珠丝杆机构;111.导轨;112.滑块;115.第二调节孔;
21.手指完成杆机构;211.指套;212.连杆;213.曲连杆;214.销;215.弧形架;216.第一调节孔;
22.手指凸轮推杆滑轨机构;221.顶杆;222.上顶杆;223-轴套;224.方形轨道;225.固定板;226.凸轮;227.滑轨挡板;228.导轨里柱;229.滑轨;230.第一电机;231.滑轮;
23.手板;
301.前腕节;302.旋转腕;303.第一腕节;304.旋转腕底板;305.第二腕节;311.第三自由度电机,312.横板,313.第一自由度电机,314.动力轮,315.电机皮带轮。
具体实施方式
现在结合附图和优选实施例对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
当手指康复机器人穿戴于人手上时,手指指向的方向为前,手掌部所在的方向为后,小指所在侧为左,拇指所在侧为右,掌背侧为上,掌心侧为下。
如图1~9所示的一种协同康复训练机器人,用于手指和/或腕部的协同康复训练,辅助回复手部功能的康复机器人,包括底座101,底座101的底面四角上均安装有万向轮102,底座101上安装有升降机构,升降机构的两侧均安装有:手腕康复训练机构,用以驱动手指康复训练机构和手腕康复训练机构上下方向调节和左右方向调节,
手指康复训练机构,用以穿戴在患者手部,通过牵引式的手指完成杆机构带动手指运动,
手腕康复训练机构,其上安装有手指康复训练机构,用以放置腕部,并带动腕部在三个自由度上进行辅助运动,
训练者面对训练机器人坐在座椅上,将手指和腕部放置在手指康复训练机构和手腕康复训练机构,调节升降机构和手指康复训练机构,开始进行手指、腕部协调康复训练。
如图4~6所示,手指康复训练机构包括手指完成杆机构21、手指凸轮推杆滑轨机构22以及手板23,所述手板23为前后空心结构,手板23的左侧或右侧板面上开设有供大拇指伸出的开孔,该开孔的开设方向根据左、右手确定,手板23的板面上安装有手指凸轮推杆滑轨机构22,手指凸轮推杆滑轨机构22根据手型分布,手指凸轮推杆滑轨机构22的前端安装有手指完成杆机构21,机构能达到的角度是0~60°。
手板23前后空心,手板23区分左右,左手左侧打有大拇指的孔,右手右侧打有大拇指的孔,右手手板23大拇指孔边设置有一个手指完成杆机构21与手指凸轮滑轨机构22,
如图5所示,手指完成杆机构21包括指套211、连杆212、曲连杆213以及弧形架215,所述指套211与训练者的手指相连套合,指套211通过连杆212与曲连杆213的一端连接,曲连杆213的另一端安装有弧形架215,弧形架215的另一端与手指凸轮推杆滑轨机构22连接。
指套211和连杆213是通过中间穿过的轴配合轴套固定防止轴的轴向窜动,轴套是用来防止轴的轴向窜动,轴套的固定是通过销与指套固定,轴套相对指套静止,但指套还是可以和连杆相对转动的;同理,连杆212和曲连杆213也是如此。
同指套211与连杆213配合轴的轴套固定一样;弧形架215与上顶杆222配合轴,也是通过销与弧形架215固定,轴套相对弧形架215静止,但弧形架还是可以和顶上杆相对转动的。
如图6所示,手指凸轮推杆滑轨机构22包括滑轨组件、第一电机230以及凸轮226,所述滑轨组件上安装有在其上移动的固定板225,固定板225的上方安装有方形轨道224,第一电机230安装在固定板225的下方,第一电机230的输出端安装有凸轮226,方形轨道224内安装有顶杆221,顶杆221位于凸轮226的上方,第一电机230驱动凸轮226转动,带动顶杆221上下移动,顶杆221上安装有上顶杆222,上顶杆222与手指完成杆机构21中的弧形架215连接。
第一电机230转动时,通过键使凸轮226转动,凸轮226推动顶杆221上下运动,顶杆221和上顶杆222通过轴和轴套连接传递运动,最后上顶杆222与手指完成杆机构21中的弧形架215也是通过轴连接传递动力,同时,为了防止电第一电机230的轴向窜动,所以在该电机减速器的退刀槽配合处加了销钉以来限制。
同时,滑轨组件安装在手板23的板面上,包括滑轨229、安装在滑轨229两端的滑轨挡板227,滑轨229的两侧分别安装有一导轨里柱228,两导轨里柱228上均连接有滑轮231,滑轮231安装在固定板225上。
另外,手板23的前端板面上安装有连接件,弧形架215的中间段通过轴连接,轴的两端与连接件之间均安装有轴承,外边的是固定轴承外圈防止轴向窜动的盖,盖分上下,用销钉连接,方便轴承安装。
曲连杆213的杆面上开设有若干第一调节孔216,弧形架215套设在曲连杆213上,并通过销214安装,用以通过销孔配合手动调节曲连杆213和弧形架215的配合位置以调节手指置放的长度。
如图7~8所示,手腕康复训练机构包括前腕节301、旋转腕302、皮带电机轮机构、第二自由度电机307以及第三自由度电机311,所述皮带电机轮机构安装在横板312上,横板312为带弧形卡头的横板,横板312通过弧形卡槽连接有旋转腕302,旋转腕302的下部通过销钉安装有旋转腕底板304,
第二自由度电机307的输出端上从右往左依次安装有第二腕节305和前腕节301,前腕节301的左侧安装有第一腕节303,前腕节301与旋转腕302之间通过第一腕节303和第二腕节305连接,第二自由度电机307驱动前腕节301与第一腕节303和第二腕节305作相对旋转运动,旋转角度为0~90°;
如图1右侧所示,皮带电机轮机构转动,驱动前腕节301和旋转腕302旋转,用以控制手腕的旋转,旋转角度为180°;
皮带电机轮机构通过第一横梁308吊装在升降机构的横杆103上,第三自由度电机311通过旋横梁310安装在升降机构的横杆103上,第三自由度电机311的输出端安装皮带电机轮机构,第三自由度电机311转动,驱动整个手腕康复训练机构旋转,旋转角度为0~360°。
如图8所示,皮带电机轮机构包括第一自由度电机313、安装在所述横板312上的动力轮314,所述第一自由度电机313安装在横板312上,第一自由度电机313的输出端安装有电机皮带轮315,电机皮带轮315与动力轮314之间通过皮带连接,动力轮314与旋转腕302接触,第一自由度电机313转动,驱动动力轮314带动旋转腕302和旋转腕302旋转。
如图1、2、9所示,升降机构包括型材箱体组件108、安装在所述型材箱体组件108内的滚珠丝杠机构110,滚珠丝杠机构110的两侧安装有导轨111,型材箱体组件108的箱体表面开设有与导轨111相对应设置的滑槽,滚珠丝杠机构110上的滑块上安装有升降台组件109,滚珠丝杠机构110的丝杠上安装有手轮106,并通过手轮106驱动滚珠丝杠机构110上下移动;
升降台组件109上穿插有横杆103,横杆103上安装有手腕康复训练机构和手指康复训练机构,横杆103上开设有若干第二调节孔115,手腕康复训练机构通过销孔配合手动调节左右方向。
升降台组件109的控制是滚珠丝杠机构110,通过手轮106旋转控制滚珠丝杠机构110带动和滑块112固定在一起的升降台组件109上下移动,达到调节手指与腕部训练机构的高度,以适应训练者身高。
工作过程:
步骤1:训练时,训练者面对手指手腕协同康复训练机器人坐在椅子上,把手臂稍向前伸到放着比较舒适的位置,然后放下,记下位置;
步骤2:手动调节手指康复训练机构和手腕康复训练机构在横杆103的位置通过销轴固定使左右机械手移到人左右手舒适位置正上方;
步骤3:手动调节升降台,使左右手指康复训练机构和手腕康复训练机构到达人左右手舒适的位置;
步骤4:需要进行康复训练的人把左右手放入手指康复训练机构和手腕康复训练机构中,调节机械手指长度固定。
步骤5:开始进行恢复训练,手指和手腕康复训练互不干扰。
以上说明书中描述的只是本发明的具体实施方式,各种举例说明不对本发明的实质内容构成限制,所属技术领域的普通技术人员在阅读了说明书后可以对以前所述的具体实施方式做修改或变形,而不背离发明的实质和范围。