基于多普勒的速度方向确定
文献发布时间:2023-06-19 18:32:25
技术领域
本发明涉及用于确定车辆的环境中的物体的三维或二维速度矢量的方法。
背景技术
本文论述了通过评估多普勒频移来确定车辆的环境中的物体的速度。
在现有技术中已知有大量的关于通过超声波测量确定物体参数的文献。正因为如此,可以在无需在此解释现有技术中已知的相应方法和设备的情况下给出一些先决条件。
因此,在此可以假定一些能够利用可用的超声波换能器进行这种测量的先决条件。
在本文中,假定可以确定物体的物体位置x
此外,假定在确定二维平面中的坐标的情况下,至少两个超声波换能器在该二维平面中不位于一个点上,并且在确定三维空间中的坐标的情况下,至少三个超声波换能器在该三维空间中既不位于一个点上也不位于一条线上。
每个超声波换能器的超声波测量系统确定多普勒频率f
发明内容
任务
因此,该提案的目的是实现一种用于测量移动物体的速度的大小和方向的方法。
该目的通过根据权利要求的方法实现。
任务的解决方案
在此提出的提案的基本思想是,当物体以速度v
如上所述,在此假定车辆的环境中的物体的位置x
为此,参与本文所述方法的每个超声波换能器都被设置为在与评估系统的交互下确定物体位置x
在本文所述的方法中,N个超声波换能器中的一者仅检测物体的多普勒速度在从物体到相关超声波换能器的方向上的方向分量。
因此,对于相关超声波换能器,相对于该超声波换能器和相关物体之间的视线垂直地移动的物体具有速度v=0m/s。因此,将多个超声波换能器的多个测量值用于确定速度矢量的分量。多个超声波换能器必须彼此间隔开。因此,确保了当物体以相关速度运动时,并非所有检测的物体的多普勒速度的方向分量都同时为0m/s。为了确定物体的速度矢量,N个超声波换能器US
考虑到声速c,基于检测的与初始发射频率f
在此的含义是:
X是具有已知大小的矩阵。该矩阵对各个超声波换能器的位置和取向进行编码。
在下文中,通常仅考虑单个超声波换能器或线性方程组的一行。为此,引入了正整数脚注i,其中,1≤i≤N。
现在,矩阵的每个第i行计算如下,其中,X的第i行由行矢量e
X
e
e
D
在此,第i个旋转矩阵D
D
在这种情况下:
R
R
R
由于通常根据车辆设计固定了车辆上的N个超声波换能器的N个位置x
通过以下公式给出由最小二乘法确定的反射点的速度矢量:
因此,在此提出的方法是一种用于确定车辆的环境中的物体的三维速度矢量的方法。
优选地,车辆具有多个(N个)超声波换能器US
现在,N个超声波换能器US
如上所述,在本文所述的方法中做如下假定:对于N个超声波换能器US
因此,所提出的方法做如下假定:作为该方法的第一步骤,已经成功确定相对于车辆的物体位置x
通常,这些值已经在工厂中以特定于类型的汇总方式进行了预先计算,并被编程到系统中或在设计中另行指定。
作为最后步骤,评估系统通过计算以下公式来估算物体反射点的速度矢量
评估系统例如通过数据接口输出以此方式计算的速度矢量
在此基础上,可以给出一种简单、粗略的方法在车辆自主驾驶时区分活物和死物,但这本身不足以实现可靠的区分。活物和死物之间的区分首先是通过评估系统将移动的物体分类为潜在活物进行的。在这种情况下,所有在可预定的时间段内相对于它们的环境移动的物体都可以被归类为可能的活物。对于有生命/无生命的区分,评估设备通常使用诸如衰减、失真和相移之类的其他参数。在这方面,下文说明的方法仅被理解为用于在车辆自主驾驶时区分活物和死物的部分方法。该部分方法包括以下步骤:
确定在车辆环境中的物体的物体位置x
通过上述两种方法中的一者确定物体运动的速度矢量的值;
如果物体运动的速度矢量的大小低于第一阈值,则增加该物体是活物的概率值;
如果物体运动的速度矢量的大小高于第二阈值,则降低该物体是活物的概率值;
其中,该第二阈值可以等于第一阈值,并且
其中,概率值可以取决于其他参数,
最后,如果该概率值高于第三阈值,则将该物体评估为活物。
优点
本文提出的方法能够更好地将移动物体(例如,人)从静止的环境(例如,Isopol(作为参考障碍物的垂直1m长的DN5 PVC污水管)或墙壁)中区分出来。
然而,优点不限于此。
附图说明
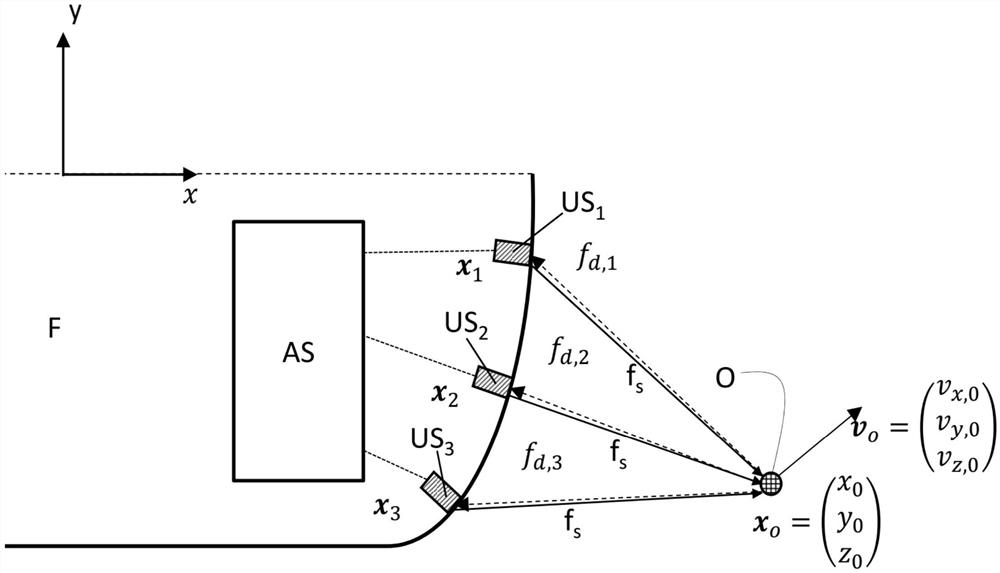
图1
图1说明了测量情况。物体O位于车辆F的车辆环境中,作为示例,该车辆的轮廓部分由加粗线表示。在超声波发射器和/或超声波换能器US
附图标记列表
F 车辆
US
AS 评估系统
O 物体
f
f
β
x
x
c 声速
- 一种基于超声多普勒原理的血流速度方向的测量方法
- 用于产生放大的测量体以基于激光多普勒测速法来确定纺织纤维的结构和/或缠绕速度的方法和装置