一种马铃薯种薯智能切块工作站
文献发布时间:2023-06-19 18:34:06
技术领域
本发明属于农业机械领域,特别涉及一种马铃薯种薯智能切块工作站。
背景技术
马铃薯是我国四大主粮作物之一,其种植面积逐年增加,薯农往往采用切块种植,实际生产加工中,马铃薯种薯切块工作主要依靠人工完成,存在劳动力短缺、效率低、成本高等问题。在现有技术中,马铃薯种薯切块机在识别芽眼位置信息的基础上使用成型刀具,一次性完成种薯的切割工作,不可避免造成误切、错切,从而导致切块效果不佳。
发明内容
本发明目的是提供一种马铃薯种薯智能切块工作站,其能够识别种薯的芽眼位置和选择切刀的角度以及循环多次完成切块工作,以代替人工马铃薯种薯切块工作,提高切块效率和质量,降低劳动强度。
为达到上述目的,本发明采用以下技术方案;
一种马铃薯种薯智能切块工作站,包括工作台、进料输送机、马铃薯种薯智能切块单元、转弯输送机、入库单元、送料输送机及导向拨盘,所述进料输送机设置在所述工作台的上方,用于输送马铃薯种薯;所述马铃薯种薯智能切块单元设置在所述工作台的上方并位于所述进料输送机的出料端,用于称重、切割马铃薯种薯及检测马铃薯种薯芽眼和分离马铃薯种薯块;所述转弯输送机设置在所述工作台的上方并位于所述马铃薯种薯智能切块单元的出料端,用于输送待加工的马铃薯种薯块;所述入库单元设置在所述工作台的上方并位于所述转弯输送机的出料端,用于输送待加工和已加工的马铃薯种薯块;所述送料输送机设置在所述工作台的上方,分别与所述马铃薯种薯智能切块单元和所述入库单元对齐连接,用于输送马铃薯种薯块;所述导向拨盘分别设置在所述进料输送机、马铃薯种薯智能切块单元、转弯输送机、入库单元上,用于改变已加工和待加工的马铃薯种薯(种薯块)的位置。
优选的,所述马铃薯种薯智能切块单元包括但不限于第一切块单元、第二切块单元且第一切块单元与第二切块单元的结构、功能、作用相同,不同的地方在于所述第一切块单元设置在所述工作台上并位于所述进料输送机的出料端,所述第二切块单元设置在所述工作台上并位于所述第一切块单元的出料端。
优选的,所述第一切块单元包括称重输送机、检测平台、切块平台及薯块分离输送机,所述称重输送机设置在所述工作台上并位于所述进料输送机的出料端,用于获取马铃薯种薯(种薯块)的重量,所述检测平台设置在所述工作台上并位于所述称重输送机的出料端,用于检测马铃薯种薯的芽眼位置及种薯高度,所述切块输送机设置在所述工作台上并位于所述检测平台的出料端,用于切割马铃薯种薯(种薯块),所述薯块分离输送机设置在所述工作台上并位于所述切块平台的出料端,用于分离待加工和已加工的马铃薯种薯块。
优选的,所述检测平台包括透明皮带输送机、检测平台支架、底部横梁、顶部横梁、底部摄像头、顶部摄像头、红外测距传感器,所述透明皮带输送机设置在所述工作台上并位于所述称重输送机的出料端,用于放置和传输马铃薯种薯(种薯块),所述检测平台支架设置在所述工作台上并位于所述透明输送带的中间,所述底部横梁设置在所述检测平台支架的底部并位于所述检测平台支架的中间,且所述底部横梁与所述检测平台支架的底部固定连接,用于放置底部摄像头,所述顶部横梁设置在所述检测平台支架的顶部并位于所述检测平台支架的顶部,与所述顶部横梁和所述底部横梁在同一垂直面,且所述顶部横梁与所述检测平台支架的顶部固定连接,用于放置所述顶部摄像头,所述底部摄像头设置在所述底部横梁上并位于所述底部横梁的中间,且所述底部摄像头与所述底部横梁固定连接,用于获取马铃薯种薯(种薯块)底部的芽眼信息,所述顶部摄像头设置在所述顶部横梁上并位于所述顶部横梁的中间,且所述顶部摄像头与所述顶部横梁固定连接,用于获取马铃薯种薯(种薯块)顶部的芽眼信息,所述红外测距传感器设置在所述顶部横梁上并位于所述顶部摄像头前端,且所述红外测距传感器与所述顶部横梁固定连接,用于获取马铃薯种薯(种薯块)的高度。
优选的,所述切块平台包括切块输送机、切块平台支架、切块机械手臂、压紧装置、外形检测摄像头,所述切块输送机设置在所述工作台上并位于所述称重输送机的出料端,所述切块平台支架设置在所述工作台上并位于所述切块输送机的中间,所述切块机械手臂的底部与所述切块平台支架的顶部固定连接,所述压紧装置设置在所述切块平台支架上并位于所述切块平台支架的两侧,用于固定马铃薯种薯(种薯块),所述外形检测摄像头与所述切块平台支架的横梁固定连接,用于检测马铃薯种薯(种薯块)的大小。
优选的,所述切块输送机包括切块皮带输送机、切块板,所述切块板设置在所述切块皮带输送机上并位于所述切块皮带输送机的输送带的中间,用于支撑切块时的作用力。
优选的,所述切块平台支架包括支架、顶盖、压紧横梁,所述支架设置在所述工作台上并位于所述切块输送机的中间,所述顶盖设置在所述支架上并位于所述支架的顶部且所述顶盖与所述支架固定连接,用于固定和支撑所述切块机械手臂,所述压紧横梁包括左侧压紧横梁和右侧压紧横梁,分别设置在所述支架上并位于所述支架的两侧,且所述压紧横梁与所述支架固定连接。
优选的,所述切块机械手臂包括5自由度机械手臂、切块气缸装置,所述5自由度机械手臂设置在所述顶盖上并位于所述顶盖的中间,所述切块气缸装置设置在所述5自由度机械手臂的末端并与所述5自由度机械手臂的末端固定连接。
优选的,所述切块气缸装置包括舵机法兰盘、气缸法兰盘、气缸、刀片联轴器、刀片,所述舵机法兰盘设置在所述5自由度机械手臂的末端,所述气缸法兰盘与所述舵机法兰盘固定连接,所述气缸与所述气缸法兰盘固定连接,所述刀片联轴器与所述气缸的活塞轴固定连接,所述刀片与所述刀片联轴器固定连接并在所述气缸的带动下沿竖直方向运动,用于执行切块动作。
优选的,所述压紧装置包括左侧压紧装置、右侧压紧装置,所述左侧压紧装置与所述右侧压紧装置在结构和功能上完全相同,不同的地方在于所述左侧压紧装置位于所述左侧压紧横梁的中间,且所述左侧压紧装置与所述左侧压紧横梁固定连接,所述右侧压紧装置位于所述右侧压紧横梁的中间,且所述右侧压紧装置与所述右侧压紧横梁固定连接。
优选的,所述左侧压紧装置包括左压紧装置支架、左气缸支架、左压紧气缸、左压紧片,所述左压紧装置支架设置在所述左压紧横梁上,并位于所述左压紧横梁的中间且所述左压紧装置支架与所述左压紧横梁固定连接,所述左气缸支架与所述左压紧装置支架固定连接,所述左压紧气缸与所述左气缸支架固定连接,所述左压紧片与所述左压紧气缸的活塞轴固定连接并能够在所述压紧气缸的带动下沿竖直方向运动,用于固定马铃薯种薯(种薯块)。
优选的,所述入库单元包括入库输送机、入库检测平台、入库箱,所述入库输送机设置在所述工作台上并位于所述转弯输送机的出料端,所述入库检测平台设置在所述工作台上并位于所述入库箱的前端,用于检测马铃薯种薯块是否合格,所述入库箱设置在所述工作台上并位于所述入库输送机的出料端。
优选的,所述入库检测平台包括入库检测支架、入库检测横梁、入库检测摄像头,所述入库检测支架与所述工作台固定连接且所述入库检测支架位于所述入库箱的前端,所述入库检测横梁与所述入库检测支架固定连接且位于所述入库检测支架的顶部,所述入库检测摄像头与所述入库检测横梁固定连接且位于所述入库检测横梁的中间,用于检测种薯块是否满足种薯要求。
优选的,所述送料输送机包括但不限于第一送料输送机、第二送料输送机、第三送料输送机,所述第一送料输送机设置在所述工作台上并位于所述第一切块单元的另一侧的进料端,用于输送待加工的马铃薯种薯块,所述第二送料输送机设置在所述工作台上并位于所述第一切块单元的另一侧的出料端,用于输送已加工的马铃薯种薯块,所述第三送料输送机设置在所述工作台上并位于所述第二切块单元的另一侧的出料端,用于输送已加工的马铃薯种薯块。
优选的,所述导向拨盘包括进料导向拨盘、薯块分离导向拨盘、待加工导向拨盘、入库导向拨盘、送料导向拨盘,所述进料导向拨盘设置在所述进料输送机上并位于所述进料输送机的两侧分为左进料导向拨盘和右进料导向拨盘,用于改变马铃薯种薯的初始位置,所述薯块分离导向拨盘包括但不限于第一薯块分离导向拨盘、第二薯块分离导向拨盘、第三薯块分离导向拨盘,所述第一薯块分离导向拨盘设置在所述第一切块单元的薯块分离输送机上并位于所述第二送料输送机的另一侧,用于分离所述第一切块单元已加工完成的马铃薯种薯块,所述第二薯块分离导向拨盘设置在所述第二单元的薯块分离输送机上并位于所述第三送料输送机的另一侧,用于分离所述第二切块单元已加工完成的马铃薯种薯块,所述第三薯块分离导向拨盘设置在所述第一送料输送机上并位于所述入库箱的另一侧,用于分离所述第二切块单元待加工的马铃薯种薯块到达所述第一切块单元进行再次加工,所述待加工导向拨盘设置在所述转弯输送机上并位于所述第三送料输送机的另一侧,用于引导需要再次加工的马铃薯种薯块到达所述第三薯块分离导向拨盘位置,所述入库导向拨盘包括第一入库导向拨盘、第二入库导向拨盘,所述第一入库导向拨盘设置在所述入库输送机上并位于所述第二送料输送机的另一侧,所述第二入库导向拨盘设置在所述入库输送机上并位于所述第三送料输送机的另一侧,用于引导已加工的马铃薯种薯块到达所述入库箱中,所述送料导向拨盘设置在所述进料输送机上,并位于所述第一送料输送机的另一侧,用于引导待加工马铃薯种薯块进入所述第一切块单元进行二次加工,直至种薯块合格。
优选的,所述左进料导向拨盘、右进料导向拨盘、第一薯块分离导向拨盘、第二薯块分离导向拨盘、第三薯块分离导向拨盘、待加工导向拨盘、第一入库导向拨盘、第二入库导向拨盘、送料导向拨盘均具有相同的结构和功能。
优选的,所述送料导向拨盘包括拨盘底座、旋转气缸、拨盘,所述拨盘底座与所述进料输送机和所述第一送料输送机固定连接,所述旋转气缸与所述拨盘底座固定连接,所述拨盘与所述旋转气缸的活塞固定连接并在所述旋转气缸的带动下做摇摆运动,用于改变种薯块的位置。
本发明具有以下有益效果:
本发明提供的一种马铃薯种薯智能切块工作站,通过多个功能不同的输送机、多个作用不同的摄像头、多个位置不同的导向拨盘及多个切块机械手臂组成的一个马铃薯种薯智能切块工作站,其能够识别马铃薯种薯的芽眼位置,选择不同的下刀角度及循环多次完成切块工作,以满足不同大小、外形的马铃薯种薯的智能切块,提高了切块效率和质量,降低了劳动强度,真正代替了人工切块时边看边切的操作。
附图说明
附图大体上通过举例而不是限制的方式示出各种实施例,并且与说明书以及权利要求书一起用于对所发明的实施例进行说明。在适当的时候,在所有附图中使用相同的附图标记指代同一或相似的部分。这样的实施例是例证性的,而并非旨在作为本装置或方法的穷尽或排他实施例。
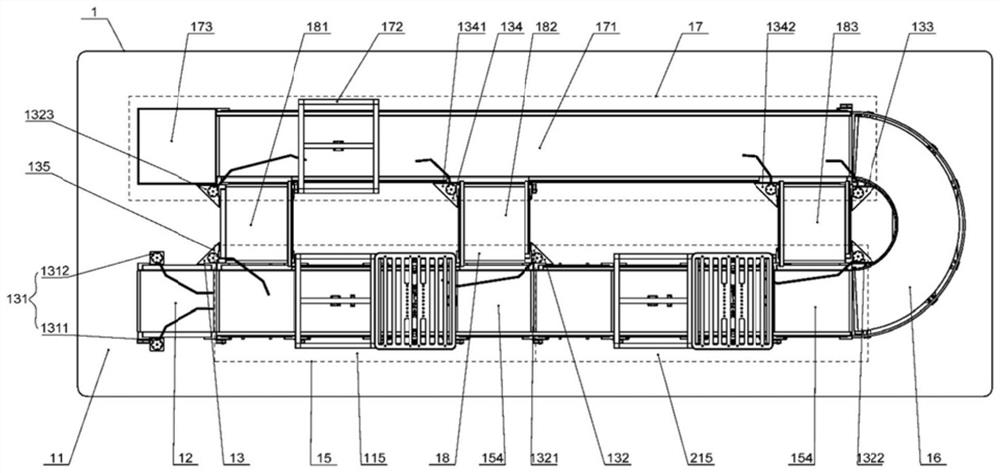
图1为本发明的整体结构示意图;
图2为本发明中的马铃薯种薯智能切块单元的轴测图;
图3为本发明中的检测平台的结构示意图;
图4为本发明中的检测支架结构示意图;
图5为本发明中的切块平台结构示意图;
图6为本发明中的切块平台支架示意图;
图7为本发明中的切块输送机示意图;
图8为本发明中的切块机械手臂结构示意图;
图9为本发明中的压紧装置结构示意图;
图10为本发明中的入库检测平台支架结构示意图;
图11为本发明中的导向拨盘的结构示意图。
图中:1-马铃薯种薯智能切块工作站;11-工作台;12-进料输送机;13-导向拨盘;15-马铃薯种薯智能切块单元;16-转弯输送机;17-入库单元;18-送料输送机;115-第一切块单元;215-第二切块单元;151-称重输送机;152-检测平台;153-切块平台;154-薯块分离输送机;1521-透明皮带输送机;1522-检测平台支架;1523-底部横梁;1524-顶部横梁;1525-底部摄像头;1526顶部摄像头;1527-红外测距传感器;1531-切块输送机;1532-切块平台支架;1533-切块机械手臂;534-压紧装置;1535-外形检测摄像头;15311-切块皮带输送机;15312-切块板;15321-支架;15322-顶盖;15323、15324-压紧横梁;15331-5自由度机械手臂;15332-切块气缸装置;153321-舵机法兰盘;153322-气缸法兰盘;153323-气缸;153324-刀片联轴器;153325-刀片;1534-左侧压紧装置;2534-右侧压紧装置;15341-左压紧装置支架;15342-左气缸支架;15343-左压紧气缸;15344-左压紧片;171-入库输送机;172-入库检测平台;173-入库箱;1721-入库检测支架;1722-入库检测横梁;1723-入库检测摄像头;181-第一送料输送机;182-第二送料输送机;183-第三送料输送机;131-进料导向拨盘;132-薯块分离导向拨盘;133-待加工导向拨盘;134-入库导向拨盘;135-送料导向拨盘;1312-左进料导向拨盘;1311-右进料导向拨盘;1321-第一薯块分离导向拨盘;1322-第二薯块分离导向拨盘;1323-第三薯块分离导向拨盘;1341-第一入库导向拨盘;1342-第二入库导向拨盘;1351-拨盘底座;1352-旋转气缸;1353-拨盘。
具体实施方式
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
参见图1至图11,本实施例提供了一种马铃薯种薯智能切块工作站,其能够识别马铃薯种薯的芽眼位置,选择不同的下刀角度,并多次循环切块动作,直至完成切块任务。
本实施例提供的马铃薯种薯智能切块工作站1,包括工作台11、进料输送机12、马铃薯种薯智能切块单元15、转弯输送机16、入库单元17、送料输送机18及导向拨盘13,进料输送机12设置在工作台11上方,用于输送马铃薯种薯,马铃薯种薯智能切块单元15设置在工作台11的上方并位于进料输送机12的出料端,用于称重、切割马铃薯种薯及检测马铃薯种薯芽眼和分离马铃薯种薯块,转弯输送机16设置在工作台11的上方并位于所述马铃薯种薯智能切块单元15的出料端,用于输送待加工的马铃薯种薯块,入库单元17设置在工作台11的上方并位于转弯输送机16的出料端,用于输送待加工和已加工的马铃薯种薯块,送料输送机18设置在工作台11的上方,分别与马铃薯种薯智能切块单元15和入库单元17对齐连接,用于传输马铃薯种薯块,导向拨盘13分别设置在进料输送机12、马铃薯种薯智能切块单元15、转弯输送机16、入库单元17上,用于改变已加工和待加工的马铃薯种薯(种薯块)的位置。
需要说明的是,本实施例中马铃薯种薯智能切块单元15包括但不限于第一切块单元115、第二切块单元215且第一切块单元115与第二切块单元215的结构、功能、作用相同,不同的地方在于第一切块单元115设置在工作台11上并位于进料输送机12的出料端,第二切块单元215设置在工作台11上并位于第一切块单元115的出料端。
在本实施例中,第一切块单元115包括称重输送机151、检测平台152、切块平台153及薯块分离输送机154,称重输送机151设置在工作台11上并位于进料输送机12的出料端,用于获取马铃薯种薯(种薯块)的重量,检测平台152设置在工作台11上并位于称重输送机151的出料端,用于检测马铃薯种薯的芽眼位置和种薯高度,切块平台153设置在工作台11上并位于检测平台152的出料端,用于切割马铃薯种薯(种薯块),薯块分离输送机154设置在工作台11上并位于切块平台153的出料端,用于分离待加工和已加工的马铃薯种薯块。
检测平台152包括透明皮带输送机1521、检测平台支架1522、底部横梁1523、顶部横梁1524、底部摄像头1525、顶部摄像头1526、红外测距传感器1527,透明皮带输送机1521设置在工作台11上并位于称重平台151的出料端,用于放置和传输马铃薯种薯(种薯块),检测平台支架1522设置在工作台11上并位于透明皮带输送机1521的中间,底部横梁1523设置在检测平台支架152的底部并位于检测平台支架1522的中间,且底部横梁1524与检测平台支架1522的底部固定连接,用于放置底部摄像头,顶部横梁1524设置在检测平台支架1522的顶部并位于检测平台支架1522的顶部,与顶部横梁1524和底部横梁1523在同一垂直面上,且顶部横梁1524与检测平台支架1522的顶部固定连接,用于放置顶部摄像头,底部摄像头1525设置在底部横梁1523上并位于底部横梁1523的中间,且底部摄像头1525与底部横梁1523固定连接,用于获取马铃薯种薯(种薯块)底部的芽眼信息,顶部摄像头1526设置在顶部横梁1524上并位于顶部横梁1524的中间,且顶部摄像头1526与顶部横梁1524固定连接,用于获取马铃薯种薯(种薯块)顶部的芽眼信息,红外测距传感器1527设置在顶部横梁1524上并位于顶部摄像头1526的前端,且红外测距传感器1527与顶部横梁1524固定连接,用于获取马铃薯种薯(种薯块)的高度。
切块平台153包括切块输送机1531、切块平台支架1532、切块机械手臂1533、压紧装置1534,外形检测摄像头1535,切块输送机1531设置在工作台11上并位于称重输送机151的出料端,切块平台支架1532设置在工作台11上并位于切块输送机1531的中间,切块机械手臂1533的底部与切块平台支架1522的顶部固定连接,压紧装置1534设置在切块平台支架1522上并位于切块平台支架1522的两侧,用于固定马铃薯种薯(种薯块),外形检测摄像头1535与切块平台支架1532的横梁固定连接,用于检测马铃薯种薯块的大小。
切块输送机1531包括切块皮带输送机15311、切块板15312,切块板15312设置在切块皮带输送机15311上并位于切块皮带输送机15311的输送带的中间,用于支撑切块时的作用力。
切块平台支架1532包括支架15321、顶盖15322、压紧横梁15323、15324、支架15321设置在工作台11上并位于切块输送机1531的中间,顶盖15322设置在支架15321上并位于支架15321的顶部且顶盖15322与支架15321固定连接,用于固定和支撑切块机械手臂1533,压紧横梁15323包括左侧压紧横梁15323和右侧压紧横梁15324,分别设置在支架15321上并位于支架15321的两侧,且压紧横梁15323、15324与支架15321固定连接。
切块机械手臂1533包括5自由度机械手臂15331、切块气缸装置15332,5自由度机械手臂15331设置在顶盖15322上并位于顶盖15322的中间,切块气缸装置15332设置在5自由度机械手臂15331的末端并于5自由度机械手臂15331的末端固定连接。
切块气缸装置15332包括舵机法兰盘153321、气缸法兰盘153322、气缸153323、刀片联轴器153324、刀片153325,舵机法兰盘153321设置在5自由度机械手臂15331的末端,气缸法兰盘153323与舵机法兰盘153321固定连接,气缸153323与气缸法兰盘153322固定连接,刀片联轴器153324与气缸153323的活塞轴固定连接,刀片153325与刀片联轴器153324固定连接并在气缸153323的带动下沿竖直方向运动,用于执行切块动作。
需要说明的是,本实施例中压紧装置534包括左侧压紧装置1534、右侧压紧装置2534,左压紧装置1534与右压紧装置2534在结构和功能上完全相同,不同的地方在左侧压紧装置1534位于左侧压紧横梁15323的中间,且左侧压紧装置1534与左侧压紧横梁15323固定连接,右侧压紧装置2534位于右侧压紧横梁15324的中间,且右侧压紧装置2534与右侧压紧横梁15324固定连接。
左侧压紧装置1534包括左压紧装置支架15341、左气缸支架15342、左压紧气缸15343、左压紧片15344,左压紧装置支架15341设置在左侧压紧横梁15323上,并位于左侧压紧横梁15323的中间且左压紧装置支架15341与左侧压紧横梁15323固定连接,左气缸支架15342与左压紧装置支架15341固定连接,左压紧气缸15343与左气缸支架15342固定连接,左压紧片15344与左压紧气缸15343的活塞轴固定连接并能够在左压紧气缸15343的带动下沿竖直方向运动,用于固定马铃薯种薯(种薯块)。
入库单元17包括入库输送机171、入库检测平台172、入库箱173,入库输送机171设置在工作台11上并位于转弯输送机16的出料端,入库检测平台172设置在工作台11上并位于入库箱173的前端,用于检测马铃薯种薯块是否合格,入库箱173设置在工作台11上并位于入库输送机171的出料端。
入库检测平台172包括入库检测支架1721、入库检测横梁1722、入库检测摄像头1723,入库检测支架1721与工作台11固定连接且入库检测支架1721位于入库箱173的前端,入库检测横梁1722与入库检测支架1721固定连接且位于入库检测支架1721的顶部,入库检测摄像头1723与入库检测横梁1722固定连接且位于入库检测横梁1722的中间,用于检测薯块是否满足种植要求。
需要说明的是,本实施例中送料输送机18包括但不限于第一送料输送机181、第二送料输送机182、第三送料输送机183,第一送料输送机181设置在工作台11上并位于第一切块单元115的另一侧的进料端,用于输送待加工的马铃薯种薯块,第二送料输送机182设置在工作台11上并位于第一切块单元115的另一侧的出料端,用于输送已加工的马铃薯种薯块,第三送料输送机183设置在工作台11上并位于第二切块单元215的另一侧的出料端,用于输送已加工的马铃薯种薯块。
导向拨盘13包括进料导向拨盘131、薯块分离导向拨盘132、待加工导向拨盘133、入库导向拨盘134、送料导向拨盘135,进料导向拨盘131设置在进料输送机12上并位于进料输送机12的两侧分为左进料导向拨盘1312和右进料导向拨盘1311,用于改变马铃薯种薯的初始位置。
需要说明的是,本实施例中薯块分离导向拨盘132包括但不限于第一薯块分离导向拨盘1321、第二薯块分离导向拨盘1322、第三薯块分离导向拨盘1323,第一薯块分离导向拨盘1321设置在第一切块单元115的薯块分离输送机154上并位于第二送料输送机182的另一侧,用于分离所述第一切块单元115已加工完成的马铃薯种薯块,第二薯块分离导向拨盘1322设置在第二切块单元215薯块分离输送机154上并位于第三送料输送机183的另一侧,用于分离第二切块单元215已加工完成的马铃薯种薯块,第三薯块分离导向拨盘1323设置在第一送料输送机181上并位于入库箱173的另一侧,用于分离第二切块单元215待加工的马铃薯种薯块到达第一切块单元115进行再次加工。
待加工导向拨盘133设置在转弯输送机16上并位于第三送料输送机183的另一侧,用于引导需要再次加工的马铃薯种薯块到达第三薯块分离导向拨盘1323位置。
入库导向拨盘134包括第一入库导向拨盘1341、第二入库导向拨盘1342,第一入库导向拨盘1341设置在入库输送机171上并位于第二送料输送机182的另一侧,第二入库导向拨盘1342设置在入库输送机171上并位于第三送料输送机183的另一侧,用于引导已加工的马铃薯种薯块到达入库箱173中。
送料导向拨盘135设置在进料输送机上12,并位于第一送料输送机181的另一侧,用于引导待加工马铃薯种薯块进入第一切块单元115进行二次加工,直至种薯块合格。
需要说明的是,本实施例中左进料导向拨盘1312、右进料导向拨盘1311、第一薯块分离导向拨盘1321、第二薯块分离导向拨盘1322、第三薯块分离导向拨盘1323、待加工导向拨盘133、第一入库导向拨盘1341、第二入库导向拨盘1342、送料导向拨盘135均具有相同的结构和功能。
所述送料导向拨盘135包括拨盘底座1351、旋转气缸1352、拨盘1353,拨盘底座1351与进料输送机12和第一送料输送机181固定连接,旋转气缸1352与拨盘底座1351固定连接,拨盘1353与旋转气缸1352的活塞固定连接并在旋转气缸1352的带动下左摇摆运动,用于改变种薯块的位置。
综上所述,本实施例提供了一种马铃薯种薯智能切块工作站,通过多个功能不同的输送机(进料输送机12、称重输送机151、切块皮带输送机15311、薯块分离输送机154、转弯输送机16、入库输送机171、送料输送机181、182、183),多个作用不同的摄像头(顶部摄像头1524、底部摄像头1525、外形检测摄像头1535、入库检测摄像头1723),多个位置不同的导向拨盘(左进料导向拨盘1312、右进料导向拨盘1311、第一薯块分离导向拨盘1321、第二薯块分离导向拨盘1322、第三薯块分离导向拨盘1323、待加工导向拨盘133、第一入库导向拨盘1341、第二入库导向拨盘1342、送料导向拨盘135)及切块机械手臂1533组成的一个马铃薯种薯智能切块工作站,其能够识别马铃薯种薯的芽眼位置,选择不同的下刀角度及循环多次完成切块工作以满足不同大小、外形的马铃薯种薯,提高了切块效率和质量,降低了劳动强度,真正代替了人工切块时边看边切的操作。
以上所述,仅为本发明优选的具体实施方式,但本发明的保护范围不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种马铃薯种薯的智能切块系统
- 一种马铃薯种薯智能切块机