一种基于多线激光雷达扫描的水煤识别方法
文献发布时间:2023-06-19 19:18:24
技术领域
本发明涉及一种基于多线激光雷达扫描的水煤识别方法,是一种检测方法,是一种用于煤炭装运过程中进行实时在线检测的方法。
背景技术
在选煤厂仓储厂区,如果产品仓煤料储存时间较长,仓储煤料的水分便会下沉到仓底,结果是最先输送过来的积存在仓底的煤料含水量较大。煤料含水量过大,不但降低产品质量,影响经济效益,而且呈流态的水煤如果不做特别处理,从卸煤口快速冲下来水煤会强烈冲击待装车厢箱体,造成车厢损坏。按照惯例,每天前10车由装车员操作卸料闸门以小开口状态进行试探性装车作业,用肉眼观察是否存在水煤情况,如遇水煤则慢速放料,避免冲击车厢,然后通知汽车司机将水煤卸入煤场并重新来装,直到没有水煤时才连续装车外运。
随着煤炭装车自动化需求的提高,如何判断煤料中的含水量,以确定是否能够装车是一个需要解决的问题。
发明内容
为了克服现有技术的问题,本发明提出了一种基于多线激光雷达扫描的水煤识别方法。所述的方法利用水对激光的反射代替人工判断煤料中的含水量,实现了水煤判断的自动化。
本发明的目的是这样实现的:一种基于多线激光雷达扫描的水煤识别方法,所述方法所使用的系统包括:安装在装车间产品仓煤料卸料口的后上方用于扫描卸料口下方煤料的堆料形态的至少1部多线激光雷达,以及带有数据库的信息分析装置,所述的信息分析装置与产品仓的上位机连接,所述方法的步骤如下:
步骤1,收集资料:获取当前装车煤料的各项信息,包括当前装车煤料的正常流动性、正常堆料坡度、不同含水量的反射率;
步骤2,对落料扫描:装煤车辆进入装车间卸料口开启对车厢放料,在放料过程中激光雷达实时扫描卸料口下方落料区域,选取射在煤料堆面的激光点云数据,点云数据包括各个激光点的空间坐标和反射率信息;
步骤3,构建模拟煤料堆:利用点云数据的空间坐标,实时建立车厢中的模拟煤料堆,并监控煤料堆的变化;
步骤4,料堆形状分析判断:根据煤料堆的形状判断煤料中的含水量:当煤料进入车厢后快速铺平车厢底部,无法堆积,判断煤料中含水量很大;当煤料进入车厢后呈粘稠态,流动性较差,堆面较陡且不规则,则判断煤料含水量较大;当煤料进入车厢后能够形成30-45堆积坡度的堆积,则认为煤料含水量接近或已经达到正常含水量;
步骤5,料堆坡度判断:提取当前煤料的正常含水量的堆积坡度与当前测量的堆积坡度进行比较,以判断当前煤料是否达到正常含水量的标准;
步骤6,含水量分析:利用点云数据里的激光点反射率进行数据分析和类比,精确的确定煤料中的含水量;
步骤7,结束检测:反复进行步骤2-6,适当调整卸料和运输车辆,直至确定溜槽所放出的煤料达到正常含水量,结束水煤检测。
进一步的,所述的含水量分析的步骤包括如下子步骤:
子步骤1:选取落料口下方、背向车辆行进方向一侧的一块区域的点云数据;
子步骤2:去除过高与过低的反射率数据,并计算选取的激光点云的平均反射率数据;
子步骤3:用与当前煤料类似的煤料以不同水分的反射率进行类比,确定当前煤料中的含水量。
本发明的优点和有益效果是:本发明通过测定点云的位置坐标用以识别煤料堆的形状进而判断煤料中水分的含量,并利用激光对煤料中水的反射率,以及事先记录的煤料水分资料,精确的确定出煤料中水分的含量,为完全自动化装车提供了水分测定的解决方案。
附图说明
下面结合附图和实施例对本发明作进一步说明。
图1是本发明实施例一所述方法所使用的系统结构原理图;
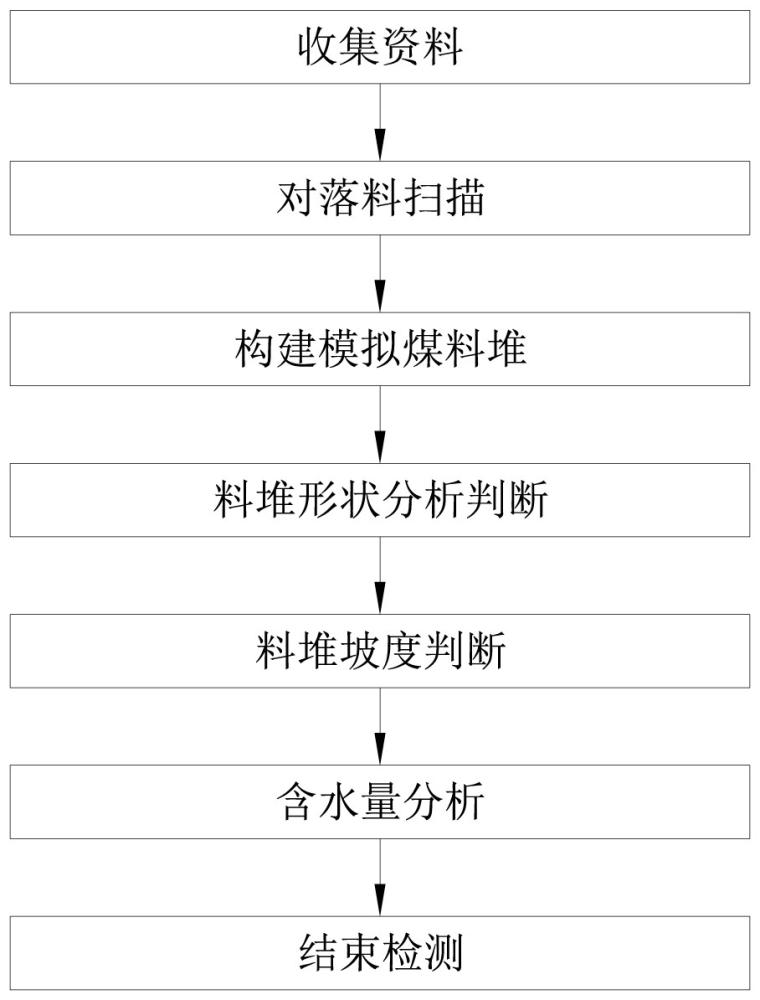
图2是本发明实施例一所述方法的流程图。
具体实施方式
实施例一:
本实施例是一种基于多线激光雷达扫描的水煤识别方法,所述方法所使用的水煤识别系统包括:安装在装车间产品仓1煤料卸料口2的后上方用于扫描卸料口下方煤料的堆料3形态的至少1部多线激光雷达4,以及带有数据库501的信息分析装置5,所述的信息分析装置与产品仓的上位机6连接,如图1所示。
本实施例所述的水煤识别系统主要由多线激光雷达和信息分析装置构成。多线激光雷达可以采用通用的设备,以多条激光线覆盖车厢的宽度,并沿车厢纵方向(前后)直线扫射,形成对整个车厢7平面的扫描,见图1。信息分析装置是带有数字处理能力的电子设备,用于对激光雷达所获取的信息进行分析和判断,以识别水煤。信息分析装置可以是单独的硬件设备,也可以是安装在产品仓总控系统中的软件。所述的上位机为产品仓总控电子设备,内设产品仓总控系统,用于对产品仓的落料等进行控制,是工业PC等具有计算和存储功能的电子装置。
本实施例所述方法的具体步骤如下,流程如图2所示:
步骤1,收集资料:获取当前装车煤料的各项信息,包括当前装车煤料的正常流动性、正常堆料坡度、不同含水量的反射率。
正常的煤料也具备一定的含水量,其流动性随含水量的不同会影响到煤料的流动性,进而影响煤料堆的堆料坡度(煤料自然堆积时所形成倾斜面与水平面的夹角)。同时各种煤料由于粒径的大小也会影响到煤料的流动性,以及当前煤料在不同含水量状态下的反射率,在装车前应获得这些资料,或预先予以测定,以备对比判断。
步骤2,对落料扫描:装煤车辆进入装车间卸料口开启对车厢放料,在放料过程中激光雷达实时扫描卸料口下方落料区域,选取射在煤料堆面的激光点云数据,点云数据包括各个激光点的空间坐标和反射率信息。
装煤的车辆通常是卡车(也可以是火车车厢),装车间是储料仓下方设置溜管和卸料口的位置,即实际装车的位置。激光雷达扫描的是从车尾到车头或相反从车头到车尾对车厢中落下的煤料进行连续扫描。点云中的点位设置可以根据检测精度的要求以及计算量确定。
步骤3,构建模拟煤料堆:利用点云数据的空间坐标,实时建立车厢中的模拟煤料堆,并监控煤料堆的变化。
由于激光雷达用多线对车厢进行扫描,所扫描的宽度和长度形成平面上的高度差异,以此高度差异形成三维立体的料堆形成,这一料堆形状是实时的,随落入车厢中煤料量的增加而不断变化。由于水煤中含水量的不同可以通过煤料堆的形成而判断水煤的含水量。
步骤4,料堆形状分析判断:根据煤料堆的形状判断煤料中的含水量:当煤料进入车厢后快速铺平车厢底部,无法堆积,判断煤料中含水量很大;当煤料进入车厢后呈粘稠态,流动性较差,堆面较陡且不规则,则判断煤料含水量较大;当煤料进入车厢后能够形成30-45堆积坡度的堆积,则认为煤料含水量接近或已经达到正常含水量。
在煤料下泄过程中,煤料堆积并滑落形成堆面。煤料含水量不同其堆面形态也不同,主要有三种:a、非正常的液煤料,呈水样流体,含水量很大,流动性快,可以快速平铺车厢底;b、正常煤料,流动性好,呈某一角度倾斜的堆面,该堆面角度与煤料品种(密度、颗粒大小)有关;c、非正常的粘稠态煤料,呈果冻状,含水量较大,流动性较差,堆面较陡且不规则。由a、b、c三种煤料形态不难得出结论:实时测量落料口下方煤料堆料坡度即可判断煤料是否是水煤。堆料坡度约30-45度范围左右的可以认定为正常煤料,没有坡度(平铺车厢)或者坡度接近直角且不规则的则认定为水煤。
步骤5,料堆坡度判断:提取当前煤料的正常含水量的堆积坡度与当前测量的堆积坡度进行比较,以判断当前煤料是否达到正常含水量的标准;
堆面的坡度可以根据堆面各个激光点的空间坐标——水平和高度值算出堆面的倾斜角度。选取纵切堆面的那条激光线的多点数据,对各点数据的水平、高度坐标值用最小二乘法进行线性拟合,算出煤料堆面曲线y=bx+a,煤料坡度(斜率)b接近30-45度即为正常的物料,接近0度或者接近90度则说明该煤料为水煤。在形成比较完整的煤料堆后,将应实时测量和计算出的堆积坡度与当前煤料的正常堆积坡度进行比较,以确定正在装车的煤料的含水量是否已经达到了正常标准。
步骤6,含水量分析:利用点云数据里的激光点反射率进行数据分析和类比,精确的确定煤料中的含水量。
对煤料堆面的激光点云反射率进行数据分析:由于煤料颜色为黑色,吸光性好,反射率较低,当煤料所含水分偏多时,其反射率随之增大,所以对点云数据里的激光点反射率进行数据比对就不难判别出水煤的水分大小。
步骤7,结束检测:反复进行步骤2-6,适当调整卸料和运输车辆,直至确定溜槽所放出的煤料达到正常含水量,结束水煤检测。
激光雷达在溜槽卸料的过程中不断的对进入车厢的煤料进行扫描,不断的进行检测,并适时通知产品仓总控系统将含有水分较多的煤料运走处理,再继续放料,直至煤料中的水分达到要求而结束检测。
实施例二:
本实施例是实施例一的改进,是实施例一关于含水量分析的细化,所述的含水量分析的步骤包括如下子步骤:
子步骤1:选取落料口下方、背向车辆行进方向一侧的一块区域的点云数据。
利用点云数据中的反射率数据进行分析可以只利用一部分的数据,本实施例选取了背向车辆行进方向一侧的一块区域(图1中区域A)作为研究对象,对这一区域的反射率数据进行计算。
子步骤2:去除过高与过低的反射率数据,并计算选取的激光点云的平均反射率数据。
例如:选取300个反射率数据,去除反射率偏高的100个点和偏低的100个点,只对介于中间值的100个点进行平均计算,得出该煤料的反射率。
子步骤3:用与当前煤料类似的煤料以不同水分的反射率进行类比,确定当前煤料中的含水量。
对于各种煤料应事先将不同含水量状态下的发射率记录下来,存入数据库中作为标尺数据。实际测量时,将实时装车下放的煤料进行反射率检测,与标尺数据进行比对,以此量化煤料水分的大小,确定煤料中水分量。
利用煤料反射率的大小检测,可以有效在预放料时判断煤料的水分大小从而调整卸料口大小进而避免含水煤料对车厢的冲击损坏。
最后应说明的是,以上仅用以说明本发明的技术方案而非限制,尽管参照较佳布置方案对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案(比如装车站的类型或形式、激光雷达和信息分析装置的形式、步骤的先后顺序等)进行修改或者等同替换,而不脱离本发明技术方案的精神和范围。
- 一种基于精细化雷达扫描边缘点的多线激光雷达和相机联合标定方法
- 一种用于线阵激光雷达的振转结合周向扫描装置
- 一种基于激光雷达测距信息的室内场景识别方法
- 一种基于MEMS振镜的三维扫描激光雷达
- 一种多线激光雷达的扫描系统、多线激光雷达及扫描方法
- 一种多线激光雷达的扫描系统、多线激光雷达及扫描方法