玩具控制器
文献发布时间:2023-06-29 06:30:04
技术领域
本发明涉及玩具,更具体地说,涉及一种包括可转动基座的控制器,该基座具有多个平台,这些平台可以相对于基座选择性地转动。
背景技术
一些玩具是动作玩偶。动作玩偶可以代表人物或虚构的角色。一些动作玩偶具有关节式肢体。用户通常可以通过活动关节式肢体来手动操纵或把玩该动作玩偶。一些动作玩偶可以通过使用控制器来远程控制。
发明内容
本发明的一个方面涉及一种玩具控制器。该玩具控制器包括:壳体;基座,其由壳体支撑并被构造为相对于壳体在至少第一位置和第二位置之间转动;多个平台,其由基座支撑,每个平台被构造为相对于基座旋转;拉柄,其可相对于壳体运动并被构造为控制基座在至少第一位置和第二位置之间的转动;以及触发器,其由壳体支撑并被构造为启动多个平台中的至少一个平台的转动。
其他的方面还包括联接到基座并支撑触发器的握柄。
其他的方面还包括连接器,该连接器联接到基座并且被构造成与游戏表面(playing surface)相接合。
其他的方面还包括,其中,拉柄包括一个或多个齿,该一个或多个齿被构造成驱动基座的转动。
其他的方面还包括,其中,多个平台包括两个平台。
其他的方面还包括,其中,多个平台包括三个平台。
其他的方面还包括,其中,触发器被构造成当至少一个平台处于相对于壳体的特定周向位置时,启动至少一个平台的转动。
其他的方面还包括,其中,触发器被构造成当多个平台中的每个平台都处于相对于壳体的特定周向位置时,单独地启动每个平台的转动。
其他的方面还包括离合器,该离合器被构造成仅允许基座相对于壳体在一个方向上转动。
其他的方面还包括弹簧臂,该弹簧臂联接到锁定销,用于选择性地使锁定销与基座接合。
其他的方面还包括引导销和轨道,其中,轨道包括一个或多个斜面/唇部,该斜面/唇部被构造成偏置引导销,使得引导销仅沿一个方向跟随轨道。
本发明的一个方面涉及一种玩具控制器。该玩具控制器包括壳体和基座,该基座被构造为相对于壳体转动并支撑多个平台,该多个平台中的每个平台都被构造为相对于基座旋转。
其他的方面还包括拉柄,该拉柄可相对于壳体运动并被构造成控制基座的转动。
其他的方面还包括触发器,该触发器由壳体支撑并被构造成启动所述多个平台中的至少一个平台相对于所述基座的转动。
其他的方面进一步包括,其中,所述多个平台中的每个平台都被构造为仅当每个平台相对于壳体处于特定的周向位置时相对于基座旋转。
其他的方面还包括,其中,多个平台包括三个平台。
其他的方面还包括离合器,该离合器被构造成仅允许基座相对于壳体在一个方向上转动。
其他的方面还包括弹簧臂,该弹簧臂联接到锁定销,用于选择性地使锁定销与基座接合。
其他的方面还包括引导销和轨道,其中,轨道包括一个或多个斜面/唇部,该斜面/唇部被构造成偏置引导销,使得引导销仅沿一个方向跟随轨道。
本发明的一个方面涉及一种用于操作玩具控制器以选择性地定位和转动多个平台中的每个平台的方法。该方法包括:启动由壳体支撑的触发器,以使多个平台中的第一平台相对于基座旋转,第一平台设置在相对于壳体的特定周向位置;启动拉柄,以使基座相对于壳体转动,从而使多个平台中的第二平台运动到特定周向位置;以及启动触发器,以使多个平台中的第二平台相对于基座旋转。
附图说明
结合附图,根据以下描述和所附权利要求,本公开的特征将变得更加完全地显而易见。应当理解的是,这些附图仅描绘了根据本公开的若干实施例,而不应被认为是在限制本公开的范围,现在将通过使用附图以附加的特定性和细节来描述本公开。
图1是根据本发明优选实施例的控制器的俯视立体图,该控制器包括具有多个平台的可转动的基座,用于选择性地旋转多个动作玩偶。
图2是图1的控制器的仰视立体图,并且示出了可滑动的连接器,该连接器延伸穿过控制器的壳体以用于联接到游戏表面。
图3是图1的控制器的俯视平面图,示出了用于选择性地相对于壳体转动基座的拉柄。
图4是沿图3中的线4-4截取的截面图。
图5是图1的控制器的俯视平面图,其中,壳体的顶部被移除以示出通过握柄的触发器联接的滑动件,该滑动件用于用户启动基座上的多个平台中的一个平台以便绕平台的轴线旋转。
图6是图1的控制器的俯视平面图,其中,基座的外壳被移除以示出用于选择性地将多个平台中的一个平台联接到滑动件的多个辐条。
图7是图1的控制器的爆炸图,示出了壳体内的子部件。
图8A是在轨道上的第一位置处的引导销的立体图,该引导销使锁定销从与离合器接合转变到从离合器脱离。
图8B是在引导销已经沿着轨道从第一位置运动到第二位置之后的引导销的立体图,该第二位置允许拉柄缩回以引起基座的转动。
图8C是在引导销已经沿着轨道从第二位置运动到第三位置之后的引导销的立体图,该第三位置使锁定销与离合器接合以防止基座在拉柄随后伸出时转动。
图9是图1的控制器的立体图,其中,移除了底部部分以暴露拉柄上的一个或多个齿以及齿轮。
图10是基座的爆炸图,其中,移除了壳体的顶部部分。
图11是图1的控制器的立体图。
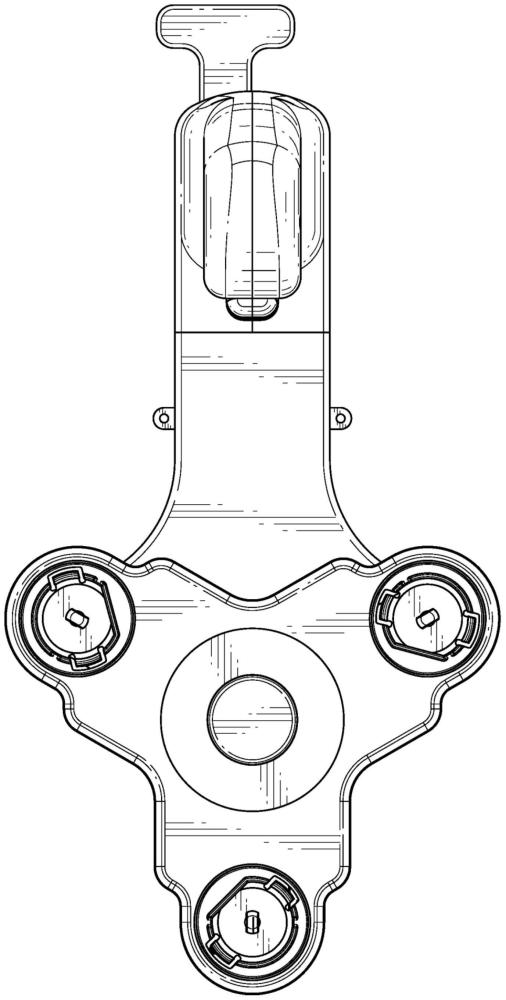
图12是图11的控制器的俯视图。
图13是图11的控制器的仰视图。
图14是图11的控制器的左侧视图。
图15是图11的控制器的右侧视图。
图16是图11的控制器的后侧视图。
图17是图11的控制器的前侧视图。
具体实施方式
以下的详细描述针对某些特定实施例。然而,在此公开的本发明可以以由权利要求限定和覆盖的多种不同方式实施。在本说明书中,参照了附图,其中,相同的部件始终用相同的附图标记表示。本发明的特征、方面和优点现在将参考若干实施例的附图来描述,这些实施例旨在处于在此公开的发展的范围内。通过参考附图对实施例的以下详细描述,这些实施例和其他实施例对于本领域技术人员将变得显而易见,本发明不限于本文公开的任何特定实施例。
图1是根据本公开的实施例的控制器20的俯视立体图。在某些实施例中,控制器20包括壳体22和可相对于壳体22转动的基座24。在某些实施例中,基座24支撑多个平台32(a)-32(n),所述多个平台用于旋转设置在其上的多个动作玩偶。在某些实施例中,基座24支撑多个平台32,但每次仅旋转一个平台32(及其相关联的动作玩偶)。在某些实施例中,基座24支撑两个平台32。在某些实施例中,如图1所示,基座24支撑三个平台32。在某些实施例中,基座24支撑四个或更多个平台32。
在某些实施例中,控制器20包括握柄26。在某些实施例中,握柄26被构造为由用户抓握。在某些实施例中,握柄26包括触发器28。在某些实施例中,用户将他们的手掌放在握柄26上,然后将他们的手指缠绕在触发器28上。以这种方式,用户可以在他们的手掌和手指之间挤压握柄26和触发器28以启动触发器28。在所示的实施例中,触发器28被构造为当用户挤压触发器28时至少部分地缩回到握柄26内。在某些实施例中,触发器28的运动导致平台32(a)在某些实施例中围绕平台32(a)的大致竖直轴线转动或旋转。在某些实施例中,竖直轴线与平台的中心同轴。
在某些实施例中,用户启动握柄26以转动多个平台32(a)-32(n)中的至少一个平台32。在某些实施例中,握柄26的启动使平台32(a)转动,该平台示出在图1所示的位置中。在某些实施例中,该位置是相对于壳体22的特定周向位置。在某些实施例中,该位置是相对于壳体22最远的位置。当然,在某些实施例中,代替转动平台32(a)或除转动平台32(a)之外,握柄26的启动可以转动一个或两个平台32(b)、32(c)。
在某些实施例中,触发器28的启动使相对于壳体22处于特定周向位置的平台32转动。例如,在某些实施例中,当平台32位于相对于壳体22最远的位置时,触发器28使平台32绕平台32的竖直轴线转动。例如,在图1中,平台32(a)位于最远的位置。因此,在示范性实施例中,当触发器28被启动时,平台32(a)围绕其轴线转动。如下面将要解释的,在某些实施例中,平台32(a)的周向位置可以在相对于壳体22的两个或更多个不同周向位置之间改变。例如,在某些实施例中并且如图1所示,控制器20提供三个不同的周向位置,用于相对于壳体22定位每个平台32。在所示实施例中,三个不同的周向位置相对于基座24的转动轴线成60度、180度和300度。因此,如果平台32(c)运动到壳体22的最远位置(例如,180度),触发器28的启动可导致平台32(c),而不是平台32(a),绕平台32(c)的竖直轴线旋转。在某些实施例中,三个不同周向位置中的一个或多个周向位置位于不同于图1所示出的周向位置。
当然,在某些实施例中,当平台32(a)处于最远位置时,触发器28的启动不需要转动平台32(a)。例如,在某些实施例中,触发器28的启动可以使平台32(c)围绕平台32(c)的竖直轴线旋转,即使平台32(c)不在最远的位置。因此,尽管在图1所示的实施例中,触发器28的启动使平台32(a)旋转,但在其它实施例中,触发器28的启动可使平台32(a)-32(n)中的任何一个平台或多个平台分别绕其竖直轴线旋转。
在某些实施例中,控制器20包括拉柄30。在某些实施例中,拉柄30被构造为由用户的手抓握。在某些实施例中,用户将他们的手掌放在拉柄30上,然后将他们的手指缠绕在拉柄30的一侧。以这种方式,用户可以将拉柄30抓在他们的手掌和手指之间,以便启动拉柄30。
在所示的实施例中,拉柄30被构造用于用户将拉柄30在伸出或向后位置和缩回或向前位置之间运动。在图1所示的示例性实施例中,拉柄30处于缩回或向前位置。在某些实施例中,拉柄30的运动可使基座24绕基座24的竖直轴线转动或旋转。在某些实施例中,当用户将拉柄30从缩回位置运动到伸出位置时,拉柄30预加载基座24,但不相对于壳体22转动基座24。继续该示例,在某些实施例中,当用户将拉柄30从伸出位置运动到缩回位置时,拉柄30相对于壳体22转动基座24。在某些其它实施例中,当用户将拉柄30从伸出位置运动到缩回位置时,拉柄30预加载基座24,但不相对于壳体22转动基座24。继续该示例,在某些实施例中,当用户将拉柄30从缩回位置运动到伸出位置时,拉柄30相对于壳体22转动基座24。
在某些实施例中,用户启动拉柄30以相对于壳体22转动基座24。在某些实施例中,拉柄30的启动使基座24转动,使得多个平台32(a)-32(n)相对于壳体22的具体周向位置改变。例如,在某些实施例中,拉柄30的启动使多个平台32绕基座24的竖直轴线转动。例如,在图1中,平台32(a)位于最远的位置。因此,在示例性实施例中,当拉柄30被启动时,多个平台32(a)-32(n)(包括平台32(a))与基座24一起围绕基座24的竖直轴线转动。以这种方式,多个平台32(a)-32(n)的周向位置可以相对于壳体22在两个或更多个不同的周向位置之间改变。
在某些实施例中,控制器20提供用于定位每个平台32的三个不同的周向位置。在所示实施例中,三个不同的周向位置相对于基座24的转动轴线成60度、180度和300度。因此,假设多个平台32(a)-32(n)的初始位置如图1所示,并且基座24沿逆时针方向转动,则拉柄30的启动使多个平台32(a)-32(n)运动,使得例如平台32(a)运动到平台32(c)的位置(例如,60度)。类似地,平台32(b)运动到平台32(a)的位置(例如,180度),并且平台32(c)运动到平台32(b)的位置(例如,300度)。
当然,在某些实施例中,拉柄30不需要沿逆时针方向转动基座24。例如,在某些实施例中,拉柄30的启动可使基座24绕基座24的轴线沿顺时针方向转动。在某些实施例中,基座24的转动轴线与轴38(图4)同轴。因此,尽管在所示的实施例中,拉柄30的启动使基座24沿逆时针方向转动,但在其它实施例中,拉柄30的启动可使基座24沿顺时针方向转动。
图2-图4示出了图1的控制器20。图2是图1的控制器20的仰视立体图,并且示出了延伸穿过控制器20的壳体22用于联接到游戏表面的可滑动的连接器34。图3是图1的控制器20的俯视平面图,并且示出了用于相对于壳体22选择性地转动基座24的拉柄30。图4是沿图3中的线4-4截取的截面图。
在某些实施例中,控制器20包括可滑动的连接器34。在某些实施例中,可滑动的连接器34被构造成联接到游戏表面。例如,在某些实施例中,可滑动的连接器34被构造成接合游戏表面上的连接器。以这种方式,用户可以使用游戏表面上的连接器来稳固控制器20。
在某些实施例中,控制器20包括腿部36。在某些实施例中,腿部36被构造成当可滑动的连接器34联接到游戏表面时支撑控制器20。在某些实施例中,腿部36的长度被选择为,使得当腿部36和可滑动的连接器34相对于游戏表面支撑控制器20时,控制器20的壳体22大致水平。
在某些实施例中,拉柄30包括一个或多个齿40,该齿布置成与齿轮42(图4)啮合。在某些实施例中,齿轮42被构造成与轴38同轴地转动。在某些实施例中,拉柄30的启动使齿轮42转动,以使基座24绕轴38转动。如上所述,在某些实施例中,在第一方向上启动拉柄30使齿轮42转动,以使基座24转动,而在与第一方向相反的第二方向上启动拉柄30使齿轮42转动,但不使基座24转动。
在某些实施例中,控制器20包括离合器44。在某些实施例中,离合器44被构造成允许一个或多个齿40仅在一个方向上驱动基座24的转动。例如,在某些实施例中,当拉柄30从伸出位置运动到缩回位置时,离合器44允许一个或多个齿40转动基座24,而当拉柄30从缩回位置运动到伸出位置时,离合器44防止一个或多个齿40转动基座24。当然,在其他实施例中,离合器44可以被构造成当拉柄30从缩回位置运动到伸出位置时允许一个或多个齿40转动基座24,而当拉柄30从伸出位置运动到缩回位置时防止一个或多个齿40转动基座24。
在某些实施例中,控制器20包括弹簧46。在某些实施例中,弹簧46相对于壳体22支撑齿轮42。例如,在某些实施例中,弹簧46沿朝向离合器44的方向偏置齿轮42。
在某些实施例中,控制器20包括弹簧60。在某些实施例中,弹簧60相对于壳体22并朝向缩回位置偏置拉柄30。
图5是图1的控制器20的俯视平面图,其中,壳体22(a)的顶部被移除以便示出通过握柄26的触发器28联接的滑动件70,该滑动件用于用户启动基座24上的多个平台32(a)-32(n)中的一个平台。在某些实施例中,多个平台32(a)-32(n)中的被启动的平台围绕被启动的平台32的竖直轴线旋转或转动。
在某些实施例中,触发器28包括销74。在某些实施例中,销74相对于滑动件70的行进方向垂直地布置。在某些实施例中,销74被构造成接合滑动件70上的环形件72,以便将触发器28的运动传递到滑动件70。在某些实施例中,环形件72设置在滑动件70的顶表面上并从滑动件70的顶表面沿向上的方向延伸。
在某些实施例中,握柄26包括互锁装置88。在某些实施例中,互锁装置88被构造成相对于握柄26在接合位置和脱开位置之间运动。例如,在某些实施例中,互锁装置88通过使互锁装置88与拉柄30接合来防止用户在触发器28被拉动时使拉柄30运动,同时仍允许触发器28使滑动件70运动。在某些实施例中,当触发器28被拉动时,互锁装置88与拉柄30中的孔89接合。在某些实施例中,当拉柄30处于缩回位置时,互锁装置88与孔89接合。
在某些实施例中,握柄26包括第一部分26A和第二部分26B。在某些实施例中,触发器28包括第一部分28A和第二部分28B。在某些实施例中,触发器28的第一部分28A被构造成与滑动件70接合,而触发器28的第二部分28B被构造成通过互锁装置88选择性地接合拉柄30中的孔89。在其它实施例中,触发器28的第二部分28B被构造成与滑动件70接合,而触发器28的第一部分28A被构造成经由互锁装置88选择性地接合拉柄30中的孔89。
图6是图1的控制器20的俯视平面图,其中,基座24被移除以示出多个辐条78。在某些实施例中,多个辐条78设置在基座24内,用于选择性地将多个平台32(a)-32(n)中的一个平台联接到滑动件70。在所示实施例中,控制器20包括三个辐条78。在其它实施例中,控制器20包括两个辐条78。在其它实施例中,控制器20包括四个或更多个辐条78。当然,本公开不限于此,因为控制器20可以包括任何数量的辐条78并且仍然落入本公开的范围内。在所示实施例中,三个辐条78围绕基座24的周向以120度间隔开。当然,本发明不限于此,辐条78可以围绕周向以任何距离间隔开,并且仍然落入本发明的范围内。
在某些实施例中,滑动件70包括凸舌76(图4)。在某些实施例中,凸舌76被构造成与多个辐条78中的一个辐条接合。在某些实施例中,凸舌76被构造成与当前设置在特定周向位置的多个辐条78中的任何一个辐条接合。在所示实施例中,凸舌76被构造成与设置在特定周向位置的辐条接合。在某些实施例中,该特定位置是相对于壳体22最远的位置。
在某些实施例中,辐条78包括钩80。在某些实施例中,钩80具有“C”的形状。在某些实施例中,钩80被构造成与滑动件70的凸舌76接合。当接合时,滑动件70的线性运动传递到辐条78。
在某些实施例中,每个辐条78包括一个或多个齿82。在某些实施例中,一个或多个平台32中的每个平台都与齿轮84啮合。齿轮84的转动导致平台32绕平台32的大致竖直且中心的轴线转动。在某些实施例中,每个辐条78的一个或多个齿82与平台32之一的齿轮84啮合。以这种方式,一个或多个齿82将辐条78的线性运动转换为相应平台32的转动运动,从而使平台32绕其轴线转动或旋转。
图7是图1的控制器20的爆炸图,示出了壳体22的顶部部分22A和壳体22的底部部分22B内的子部件。在某些实施例中,控制器20包括锁定臂48和锁定销50。在某些实施例中,当用户将拉柄30从缩回位置运动到伸出位置时,锁定销50选择性地与离合器44接合以防止壳体22转动。在某些实施例中,滑动件70包括被构造成接收离合器44的开口87。
图8A是位于拉柄30中的轨道56上的第一位置处的引导销54的立体图。在某些实施例中,引导销54由引导臂52支撑。在某些实施例中,引导臂52枢转地联接到锁定臂48。
在某些实施例中,拉柄30的线性运动引起联接到锁定销50并由引导通道53(图7)支撑的弹簧臂51(图7)将锁定销50从与联接到离合器44的基座24接合转变为从基座24脱离,然后当引导销54跟随轨道56时回到处于接合。在某些实施例中,轨道56设置在拉柄30中并被构造成接纳引导销54。
在某些实施例中,轨道56是闭合的。在某些实施例中,轨道56是平行四边形的形状。在某些实施例中,轨道56具有大致菱形的形状。在某些实施例中,轨道56包括设置在轨道56的底表面上的一个或多个斜面/唇部58。在某些实施例中,一个或多个斜面/唇部58被构造成偏置引导销54,使得引导销54沿一个方向(即,顺时针或逆时针)跟随轨道56。在图8A-图8C所示的实施例中,引导销54沿顺时针方向跟随轨道56。在其它实施例中,引导销54沿逆时针方向跟随轨道56。
根据引导销54沿轨道56的位置,锁定销50可以与基座24接合或不接合。例如,在某些实施例中,当引导销54处于如图8B所示的通道56的腿部中时,锁定销50不与基座24接合。相反,当引导销54处于如图8C所示的通道56的腿部中时,锁定销50与基座24接合。
在某些实施例中,当锁定销50脱离时,拉柄30的一个或多个齿40的线性运动驱动基座24的逆时针转动。在某些实施例中,当锁定销50接合时,拉柄30的一个或多个齿40的线性运动不驱动基座24的转动。在某些实施例中,虽然拉柄30的一个或多个齿40沿任一方向的线性运动驱动齿轮42,但是当锁定销50与联接到离合器44的基座24接合时,齿轮42从离合器44脱离。以这种方式,齿轮42能够通过离合器44滑动而不将转动运动传递到离合器44。
在所示实施例中,齿轮42的顶表面包括一个或多个斜面45,该斜面被构造成当齿轮42沿第一方向(例如,逆时针方向)被驱动时接合离合器44的底表面中的一个或多个互补斜面43,并且当齿轮42沿第二方向(例如,顺时针方向)被驱动时从一个或多个互补斜面43脱离。在其他实施例中,该一个或多个斜面45被构造成当齿轮42在第一方向(例如,顺时针)上被驱动时接合该一个或多个互补斜面43并且当该齿轮42在第二方向(例如,逆时针)上被驱动时脱离该一个或多个互补斜面43。当齿轮42从离合器44脱离时,齿轮42的转动不会传递到基座24。
图8B是在引导销54已经沿着轨道56从第一位置运动到允许拉柄30缩回以引起基座24转动的第二位置之后引导销54的立体图。例如,在如图8B所示的某些实施例中,拉柄30的一个或多个齿40的线性运动驱动基座24的转动。
图8C是在引导销54已经沿着轨道56从第二位置运动到包括越过斜面/唇部58、使得锁定销50与基座24接合以防止当拉柄30运动到伸出位置时基座24转动的第三位置之后引导销54的立体图。例如,在如图8C所示的某些实施例中,拉柄30的一个或多个齿40的线性运动使齿轮42转动,但不驱动基座24的转动。
图9是图1的控制器的立体图,其中,底部部分22B被移除以暴露拉柄30和齿轮42上的一个或多个齿40。图10是基座24的爆炸图,其中,壳体22的顶部部分22A被移除。在某些实施例中,基座24包括底部部分24B和顶部部分24A。在某些实施例中,控制器20包括设置在基座24的底部部分24B和壳体22之间的环形件92。
在某些实施例中,控制器20包括设置在每个平台32和基座24的底部部分24B之间的弹簧86。在某些实施例中,弹簧86沿第一方向偏置平台32的转动。例如,在某些实施例中,当用户释放触发器28时,用户通过用弹簧86启动触发器28,然后使平台32沿与第一转动方向相反的第二转动方向转动,从而驱动平台32沿第一转动方向转动。以这种方式,控制器20可以使平台32来回转动。在某些实施例中,基座24的顶部部分24A包括被构造为接纳帽94的开口90。
图11是图1的控制器20的立体图。图12是图11的控制器20的俯视图。图13是图11的控制器20的仰视图。图14是图11的控制器20的左侧视图。图15是图11的控制器20的右侧视图。图16是图11的控制器20的后侧视图。图17是图11的控制器20的前侧视图。
虽然上面的详细描述已经示出、描述和指出了应用于各种实施例的开发的新颖特征,但是应当理解的是,在不脱离开发的精神的情况下,本领域技术人员可以对所示装置的形式和细节进行各种省略、替换和改变。如将认识到的,本开发可以在不提供本文阐述的所有特征和益处的形式内实施,因为一些特征可以与其他特征分开使用或实践。在权利要求的等同物的含义和范围内的所有变化都包含在其范围内。
以上描述详述了本文所公开的系统、装置和方法的某些实施例。然而,应当理解的是,无论上述内容在文本上有多详细,系统、装置和方法都可以以多种方式来实现。同样如上所述,应当注意,当描述本发明的某些特征或方面时,特定术语的使用不应当被认为暗示术语在本文中被重新定义为限于包括与该术语相关联的技术的特征或方面的任何特定特征。
本领域技术人员应当理解,在不脱离所描述的技术的范围的情况下,可以进行各种修改和改变。这样的修改和改变旨在落入实施例的范围内。本领域技术人员还将理解,包括在一个实施例中的部件可与其它实施例互换;来自所描绘的实施例的一个或多个部分可以以任何组合与其他所描绘的实施例包括在一起。例如,在此描述的和/或在附图中描绘的各种部件中的任何部件可以被组合、互换或从其他实施例中排除。
关于本文中基本上任何复数和/或单数术语的使用,本领域技术人员可以根据上下文和/或应用适当地从复数转化为单数和/或从单数转化为复数。为清楚起见,本文中可明确阐述各种单数/复数排列。
本领域技术人员将理解,一般而言,本文使用的术语通常旨在作为“开放式”术语(例如,术语“包括”应被解释为“包括但不限于”,术语“具有”应被解释为“至少具有”,术语“包括”应被解释为“包括但不限于”等)。本领域技术人员还将理解,如果所引入的权利要求列举的具体数量是想要的,则这样的意图将在权利要求中明确地列举,并且在没有这样的列举的情况下,不存在这样的意图。例如,为了帮助理解,以下所附权利要求可以包含使用介绍性短语“至少一个”和“一个或多个”来引入权利要求叙述。然而,此类短语的使用不应被解释为暗示通过不定冠词“一个”或“一种”引入权利要求叙述将含有此类引入的权利要求叙述的任何特定权利要求限制为仅含有一个此类叙述的实施例,即使当同一权利要求包括引言短语“一个或多个”或“至少一个”和不定冠词诸如“一个”或“一种”时(例如,“一个”和/或“一种”应典型地被解释为意指“至少一个”或“一种或多种”);这同样适用于引入权利要求叙述的明确文章的使用。此外,即使明确地列举了特定数目的引入的权利要求列举,本领域技术人员将认识到,这样的列举通常应被解释为意指至少所列举的数目(例如,没有其他修饰词的“两个列举”的裸列举通常意指至少两个列举,或两个或更多个列举)。此外,在那些情况下,惯例类似于“A、B和C等中的至少一个”。通常,在本领域技术人员理解惯例的意义上,使用这种构造(例如,“具有A、B和C中的至少一个的系统”将包括但不限于具有单独的A、单独的B、单独的C、A和B一起、A和C一起、B和C一起、和/或A、B和C一起等的系统)。在其中惯例类似于“A、B或C等中的至少一者”的那些情况下,通常,在本领域技术人员理解惯例的意义上,使用这种构造(例如,“具有A、B或C中的至少一个的系统”将包括但不限于具有单独的A、单独的B、单独的C、A和B一起、A和C一起、B和C一起、和/或A、B和C一起等的系统)。本领域的技术人员将进一步理解,无论在说明书、权利要求书还是附图中,实际上呈现两个或更多个替代术语的任何析取性词语和/或短语应被理解为涵盖包括术语中的一个,术语中的任一个或两个术语的可能性。例如,短语“A或B”将被理解为包括“A”或“B”或“A和B”的可能性。
本文所用的术语“包含”与“包括”、“含有”或“特征在于”同义,并且是包括性的或开放式的,并且不排除另外的、未列举的要素或方法步骤。
以上描述公开了本发明的几种制造方法和材料。这种发展容易改变方法和材料,以及改变制造方法和设备。考虑到本公开或本文公开的开发实践,这样的修改对于本领域技术人员将变得显而易见。因此,不希望此发展限于本文中所揭示的特定实施例,而是其涵盖落入如所附权利要求书中所体现的发展的真实范围和精神内的所有修改和替代。
虽然以上详细描述已经示出、描述和指出了应用于各种实施例的改进的新颖特征,但是应当理解,在不脱离本发明的精神的情况下,本领域技术人员可以对所示装置或过程的形式和细节进行各种省略、替换和改变。如将认识到的,本发明可在不提供本文阐述的所有特征和益处的形式内实施,因为一些特征可与其它特征分开使用或实践。本发明的范围由所附权利要求而不是由前面的描述来指示。在权利要求的等同物的含义和范围内的所有变化都包含在其范围内。
- 一种智能玩具、应用程序、控制器工作方法及装置
- 一种智能玩具和教具的控制器
- 一种玩具车转向舵机控制器
- 一种高精度玩具车转向舵机的控制器