一种晶圆盒输送装置
文献发布时间:2024-01-17 01:13:28
技术领域
本发明涉及晶圆输送的领域,尤其是涉及一种晶圆盒输送装置。
背景技术
半导体晶圆湿法槽式清洗设备在透过晶圆传递达成晶圆或是晶圆盒在整体工艺过程中进行传递,对单位时间内达成高效率的晶圆传输尤其重视。以槽式清洗设备为例,晶圆机械性移动装置是一种晶圆传递系统装置,其晶圆传输与导片模组所构成的装置在实际进行晶圆传输,必须有效性的达成高效率的晶圆传递。
在晶圆传输的过程中需要保持晶圆盒内的晶圆确保传递过程的动作协调,全程过程可控制,必须避免晶圆盒因为晃动产生各种外力破坏,所以需要进行传递过程晶圆盒与晶圆片计量以及晶圆盒的位置侦测。
发明内容
为了对传输过程中的晶圆进行侦测,本发明提供一种晶圆盒输送装置。
本发明提供的一种晶圆盒输送装置采用如下的技术方案:
一种晶圆盒输送装置,包括呈U型设置的备载区、中转区、导片区及晶圆侦测模组;
所述备载区设置有入货传递平台,所述入货传递平台的一端连接晶圆盒入货窗口,且设置若干个中间镂空的晶圆盒承载位,且若干晶圆盒承载位两侧开设转移通道,转移通道连通镂空位置贯穿入货传递平台,用于单入或双入晶圆盒的承载和传递,提供晶圆盒的临时负载;
所述中转区设置有衔接平台,衔接所述入货传递平台的另一端,所述衔接平台在备载区和所述导片区滑动,将入货传递平台上的晶圆盒中转至导片区;
所述晶圆侦测模组,包括光学侦测单元和波段侦测单元,
其中,所述光学侦测单元包括:至少一组接收集成组件和光源集成组件,每一组所述接收集成组件和光源集成组件分别位于晶圆盒承载位底部、对应镂空位置的两侧,且所述接收集成组件整体升降移动和/或旋转摆动,以接收并转向传导光线,所述光源集成组件整体升降移动和/或旋转摆动,以集成所述接收集成组件传导的光线,并通过所述镂空位置对晶圆盒内晶圆进行的光学扫描,反应晶圆的实时状态;
所述波段侦测单元至少设置在晶圆传送的X轴、Y轴及Z轴的一个方向上,且向晶圆发射毫米波进行波谱扫描,借由毫米波的传送和接收反馈晶圆的空间位置。
可选的,至少一组所述接收集成组件和光源集成组件设置在入货传递平台靠近衔接平台的晶圆盒承载位,所述波段侦测单元设置在所述入货用传递平台的中间位置,波段辐射到所有晶圆盒承载位。
可选的,所述光学侦测单元还包括光源发射端,平行于所述入货传递平台,且设置在所述入货传递平台的下方。
可选的,所述晶圆盒承载位镂空位置的四角设置有晶圆盒定位块,所述晶圆盒定位块上设置有侦测传感器,当侦测传感器侦测到晶圆盒放置在晶圆盒定位块的定位脚上时,所述光源发射端启动,向晶圆发射光线。
可选的,所述波段侦测单元包括波段发射端和波段接收端,两者的位置平行于所述入货传递平台,且高度在所述晶圆盒的中间位置。
可选的,所述导片区平行于所述备载区,用于将晶圆从晶圆盒中导出,并借由机械手臂将导出的晶圆转运至清洗区清洗;其中,所述光学侦测单元在晶圆导片的Z轴方向上,用于监测晶圆的导片区过程及机械手臂对晶圆的夹持动作。
可选的,所述备载区设置有第一长轴线性机器人,用于沿所述入货传递平台方向将晶圆盒传送至相应的晶圆盒承载位,所述导片区设置有第二长轴线性机器人,用于承接晶圆盒在导片区和中转区的传送。
可选的,所述第一长轴线性机器人和所述第二长轴线性机器人均包括可穿越镂空位置的托盘、可穿越转移通道的支撑臂及多元动作集成的运动装置,通过所述运动装置执行:
水平直线运动,托盘承接晶圆盒至相应晶圆盒承载位;
升降运动,托盘上升或下降将晶圆盒抬升脱离或载入晶圆盒承载位;
旋转运动,托盘承载晶圆盒180度旋转,改变晶圆盒方向。
可选的,所述衔接平台上设置有中间镂空的晶圆盒承载位,且晶圆盒承载位朝向入货传递平台位置开设转移通道,所述第一长轴线性机器人和所述第二长轴线性机器人均穿过转移通道进行晶圆盒的承接。
可选的,至少一组接收集成组件和光源集成组件设置在所述衔接平台的底部,对应衔接平台的晶圆盒承载位。
与现有技术相比,本发明的有益效果是:
本发明侦测传感器侦测到晶圆盒放置在晶圆盒定位块的定位脚上时,光源发射端启动,向晶圆发射光线,接收集成组件整体升降移动和/或旋转摆动,以接收并转向传导光线,光源集成组件整体升降移动和/或旋转摆动,以集成接收集成组件传导的光线,并通过镂空位置对晶圆盒内晶圆进行的光学扫描,反应晶圆的实时状态。
附图说明
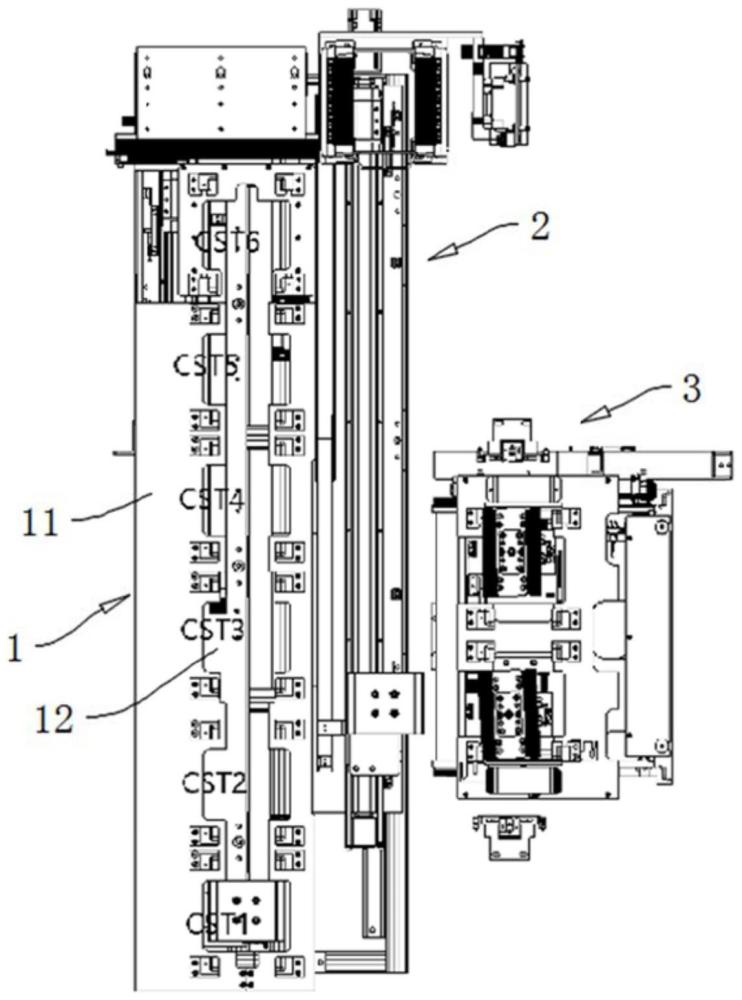
图1为本发明一种晶圆盒输送装置的结构示意图;
图2为本发明一种晶圆盒输送装置中晶圆盒的移动路径图;
图3为本发明一种晶圆侦测系统中晶圆盒的转运示意图;
图4为本发明一种晶圆盒输送装置中接收集成组件与光源集成组件的位置关系示意图;
图5为本发明一种晶圆盒输送装置中接收集成组件与光源集成组件的升降示意图;
图6为本发明一种晶圆盒输送装置中接收集成组件与光源集成组件的旋转示意图;
图7为本发明一种晶圆盒输送装置中侦测的路径示意图;
图8为本发明一种晶圆盒输送装置中晶圆盒与光学侦测单元和波段侦测单元的相对位置示意图;
图9为本发明一种晶圆盒输送装置中毫米波的发射与接收的示意图。
图中:1、备载区;11、入货传递平台;12、晶圆盒承载位;13、晶圆盒定位块;14、第一长轴线性机器人;2、中转区;21、衔接平台;3、导片区;31、第二长轴线性机器人;4、接收集成组件;5、光源集成组件。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
参照图1至图9,本发明提供的一种晶圆盒输送装置的实施例,晶圆盒输送装置,包括呈U型设置的备载区1、中转区2、导片区3及晶圆侦测模组。
备载区1设置有入货传递平台11,入货传递平台11的一端连接晶圆盒入货窗口,且设置若干个中间镂空的晶圆盒承载位12,且若干晶圆盒承载位12两侧开设转移通道,转移通道连通镂空位置贯穿入货传递平台11,用于单入或双入晶圆盒的承载和传递,提供晶圆盒的临时负载。
中转区2设置有衔接平台21,衔接入货传递平台11的另一端,衔接平台21在备载区1和导片区3滑动,将入货传递平台11上的晶圆盒中转至导片区3。
具体的,参考图1、图2所示,导片区3平行于备载区1,用于将晶圆从晶圆盒中导出,并借由机械手臂将导出的晶圆转运至清洗区清洗;备载区1设置有第一长轴线性机器人14,用于沿入货传递平台11方向将晶圆盒传送至相应的晶圆盒承载位12,导片区3设置有第二长轴线性机器人31,用于承接晶圆盒在导片区3和中转区2的传送。晶圆盒在备载区1、中转区2和导片区3之间的移动路径呈U形,节省装置整体的占用空间,提高了空间利用率,同时提高了晶圆的转运效率。
第一长轴线性机器人14和第二长轴线性机器人31均包括可穿越镂空位置的托盘、可穿越转移通道的支撑臂及多元动作集成的运动装置,通过运动装置执行:
水平直线运动,托盘承接晶圆盒至相应晶圆盒承载位12;
升降运动,托盘上升或下降将晶圆盒抬升脱离或载入晶圆盒承载位12;
旋转运动,托盘承载晶圆盒180度旋转,改变晶圆盒方向。
衔接平台21上设置有中间镂空的晶圆盒承载位12,且晶圆盒承载位12朝向入货传递平台11位置开设转移通道,第一长轴线性机器人14和第二长轴线性机器人31均穿过转移通道进行晶圆盒的承接,第一线性机器人14和第二线性机器人31的移动路径相平行。
进一步的,晶圆盒输送装置还包括晶圆侦测模组,晶圆侦测模组包括光学侦测单元和波段侦测单元。
其中,参照图4、图5和图6,光学侦测单元包括:至少一组接收集成组件4和光源集成组件5,每一组接收集成组件4和光源集成组件5分别位于晶圆盒承载位12底部、对应镂空位置的两侧,且接收集成组件4整体升降移动和/或旋转摆动,以接收并转向传导光线,光源集成组件5整体升降移动和/或旋转摆动,以集成接收集成组件4传导的光线,并通过镂空位置对晶圆盒内晶圆进行的光学扫描,反应晶圆的实时状态。
参照图7、图8和图9,波段侦测单元至少设置在晶圆传送的X轴、Y轴及Z轴的一个方向上,且向晶圆发射毫米波进行波谱扫描,借由毫米波的传送和接收反馈晶圆的空间位置。
参照图3所示,至少一组接收集成组件4和光源集成组件5设置在入货传递平台11靠近衔接平台21的晶圆盒承载位12。
参照图9所示,波段侦测单元设置在入货用传递平台11的中间位置,波段辐射到所有晶圆盒承载位12。
进一步的,光学侦测单元还包括光源发射端和光学接收端,平行于入货传递平台11,且设置在入货传递平台11的下方。入货传递平台11的晶圆盒承载位12镂空位置的四角设置有晶圆盒定位块13,晶圆盒定位块13上设置有侦测传感器,当侦测传感器侦测到晶圆盒放置在晶圆盒定位块13的定位脚上时,光源发射端启动,向晶圆发射光线。
波段侦测单元包括波段发射端和波段接收端,两者的位置平行于入货传递平台11,且高度在晶圆盒的中间位置。优选的,波段发射端发射的电磁波为毫米波。
在本发明一些实施例中,至少一组接收集成组件4和光源集成组件5设置在衔接平台21的底部,对应衔接平台21的晶圆盒承载位12。
晶圆输送过程中:
第一长轴线性机器人14沿入货传递平台11方向将晶圆盒传送至相应的晶圆盒承载位12,晶圆盒与晶圆经侦测无误后,第一长轴线性机器人14将晶圆盒移送至衔接平台21上的晶圆盒承载位12,衔接平台21对晶圆盒进行横向转运,第二长轴线性机器人31承接晶圆盒从中转区2传送至导片区3。
晶圆输送的同时,当侦测传感器侦测到晶圆盒放置在晶圆盒定位块13的定位脚上时,光源发射端启动,向晶圆发射光线,接收集成组件4整体升降移动和/或旋转摆动,以接收并转向传导光线,光源集成组件5配合接收集成组件4升降移动和/或旋转摆动,以集成接收集成组件4传导的光线,并通过镂空位置对晶圆盒内晶圆进行的光学扫描,相应的,波段发射端发射向晶圆发射毫米波进行波谱扫描,借由毫米波的传送和接收反馈晶圆的空间位置,通过对光学扫描和波谱扫描的分析,反应晶圆输送过程中晶圆盒及晶圆片的实时状态。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
- 适用于检测装载晶圆料盒的调节装置
- 一种晶圆盒清洗方法
- 一种多盒型装盒机的输送装置
- 太阳能电池晶圆盒输送装置及其太阳能电池晶圆纹理装置
- 一种晶圆清洗设备推拉式晶圆盒输送方法