一种自适应管道的管道爬行机器人
文献发布时间:2024-01-17 01:16:56
技术领域
本发明涉及管道爬行机器人技术领域,具体为一种自适应管道的管道爬行机器人。
背景技术
随着经济和社会建设的发展,机器人技术已经在各行各业中得到了广泛的发展和应用,其研究和应用水平已成为衡量国家科技发展水平的重要标志之一,在形形色色的机器人中,管道爬行机器人是比较特殊的一种,由于我国现代工农业及国防领域中使用着大量管道,如煤气管道、污水管道、空调管道等,这些管道的正常运转对维持广大人民群众的日常生活及城市的正常运转具有重要意义,但是由于管道结构的特殊性,出现管道老化或损坏现象后很难检测或维修;一些重要的管道,如煤气管道,一旦出现裂缝将造成极大的安全隐患,因此,对于管道爬行机器人的研究显得至关重要。
现有的管道爬行机器人的高度一般为固定式,且一般仅仅依靠其底部的驱动滚动来驱动其行走,行走效果不够稳定,难以适用于不同尺寸的管道,且管道内部环境恶劣,摄像头容易脏,不及时清理的话会影响其监控效果,因此提出一种自适应管道的管道爬行机器人,以解决上述问题。
发明内容
本发明的目的在于提供一种自适应管道的管道爬行机器人,以解决上述背景技术中提出的现有的管道爬行机器人的高度一般为固定式,且一般仅仅依靠其底部的驱动滚动来驱动其行走,行走效果不够稳定,难以适用于不同尺寸的管道,且管道内部环境恶劣,摄像头容易脏,不及时清理的话会影响其监控效果的问题。
为实现上述目的,本发明提供如下技术方案:一种自适应管道的管道爬行机器人,包括支撑座和第三马达,所述支撑座内部两侧对称转动连接有第一锥齿轮,所述第一锥齿轮的两侧对称啮合连接有第二锥齿轮,所述第二锥齿轮的外侧固定有第一丝杠,所述支撑座内部两侧对称转动连接有第二丝杠,所述第一丝杠的外侧和第二丝杠的外侧均螺纹连接有辅助移动机构。
所述支撑座上端面的两侧对称固定有支板,所述支板之间转动连接有第一转块,所述第一转块的一侧转动连接有第二转块,所述第二转块的一侧固定有摄像头和探照灯,所述支撑座内活动连接有自清洁机构,所述支撑座的顶部固定有吹风通道,所述吹风通道内固定有风机。
优选的,所述辅助移动机构包括支架,且支架螺纹连接在第一丝杠的外侧和第二丝杠的外侧,所述支架滑动连接在支撑座的两侧和支撑座的底部,且支架的外侧通过压缩弹簧与驱动滚轮相连接。
通过采用上述技术方案,在使用该装置之前可通过旋转第二丝杠调整好该装置的高度,之后可将前后驱动滚轮抵紧在管道的内壁上,驱动滚轮可驱动该装置行走。
优选的,所述第三马达固定在其中一个支板的外侧,且第三马达的输出端与第一转块相连接,所述第一转块内固定有第四马达,且第四马达的底部与第二转块相连接。
通过采用上述技术方案,第一转块旋转可调节摄像头的角度,第二转块旋转可调节摄像头的方向。
优选的,所述自清洁机构包括第五马达,且第五马达固定在支撑座的内部,所述第五马达的顶部通过第二转轴与海绵擦相连接,且第二转轴的外侧固定有第一圆齿轮,且第一圆齿轮的一侧啮合连接有第二圆齿轮,所述第二圆齿轮的底部固定有第三丝杠,且第三丝杠的外侧螺纹连接有套筒,所述套筒滑动连接在支撑座上,且套筒的底部固定有压板。
通过采用上述技术方案,第三丝杠旋转可带动压板向下移动,方便自动压水。
优选的,所述支撑座内开设有储水槽,所述压板伸入储水槽内,所述支撑座上固定有喷水管道,且喷水管道的首端伸入储水槽内,所述喷水管道的首端内固定有塑料挡片,且塑料挡片周向均匀分布在喷水管道上,所述支撑座的前侧固定有电动水阀,且电动水阀与储水槽相贯通。
通过采用上述技术方案,塑料挡片可起到防逆流的作用。
优选的,所述支撑座内部两侧对称固定有第一马达,且第一马达的输出端与第一锥齿轮相连接,所述支撑座内部两侧对称固定有第二马达,且第二马达的底部与第二丝杠相连接。
通过采用上述技术方案,第一丝杠旋转可带动对应的支架向下移动,第二丝杠旋转可带动对应的支架向外移动。
优选的,所述吹风通道呈倾斜状,且吹风通道的底部内固定有滤网。
通过采用上述技术方案,吹风通道可对着摄像头吹风,方便自动风干摄像头。
优选的,所述探照灯设置有四个,且四个探照灯周向均匀分布在第二转块上。
通过采用上述技术方案,探照灯可发挥照明的功能。
优选的,所述支撑座内固定有电池组,且电池组的顶部固定有信号传输器,所述电池组电性连接有第一马达、第二马达、驱动滚轮、第三马达、第四马达、摄像头、探照灯、第五马达、风机和信号传输器。
通过采用上述技术方案,电池组可为整个装置供电。
与现有技术相比,本发明的有益效果是:该自适应管道的管道爬行机器人,
(1)本发明能够适用范围广和稳定行走的效果,第二丝杠旋转可伸展出对应的支架,方便调节支撑座的高度,使前后驱动滚轮处在管道的中间处滚动,使该装置能够适用于各种尺寸的管道,第一丝杠旋转可伸展出对应的支架,对应的驱动滚轮最终抵紧在管道的内壁上,利用驱动滚轮驱动该装置行走的过程中,压缩弹簧可起到缓冲的作用,使该装置行走起来更加平稳。
(2)本发明能够实现自清洁的效果,摄像头可用来监控管道内的环境,储水槽可用来储水,顺时针90度旋转第一转块之后,第二转轴、第一圆齿轮、第二圆齿轮和第三丝杠整体旋转,以此降下压板,压板将储水槽内的水压出,水通过喷水管道喷到海绵擦上,海绵擦随着第二转轴一起旋转,方便自动清洁摄像头,将第一转块转回至水平状态之后可利用风机风干摄像头,使摄像头能够保持整洁。
(3)本发明可实现照明的效果,利用摄像头监控管道内环境的过程中,探照灯可起到照明的作用,使监控到的画面更加明亮清晰。
附图说明
图1为本发明正视立体结构示意图;
图2为本发明仰视立体结构示意图;
图3为本发明正视剖面结构示意图;
图4为本发明右视结构示意图;
图5为本发明俯视剖面结构示意图;
图6为本发明俯视外观结构示意图;
图7为本发明喷水管道与塑料挡片连接结构示意图。
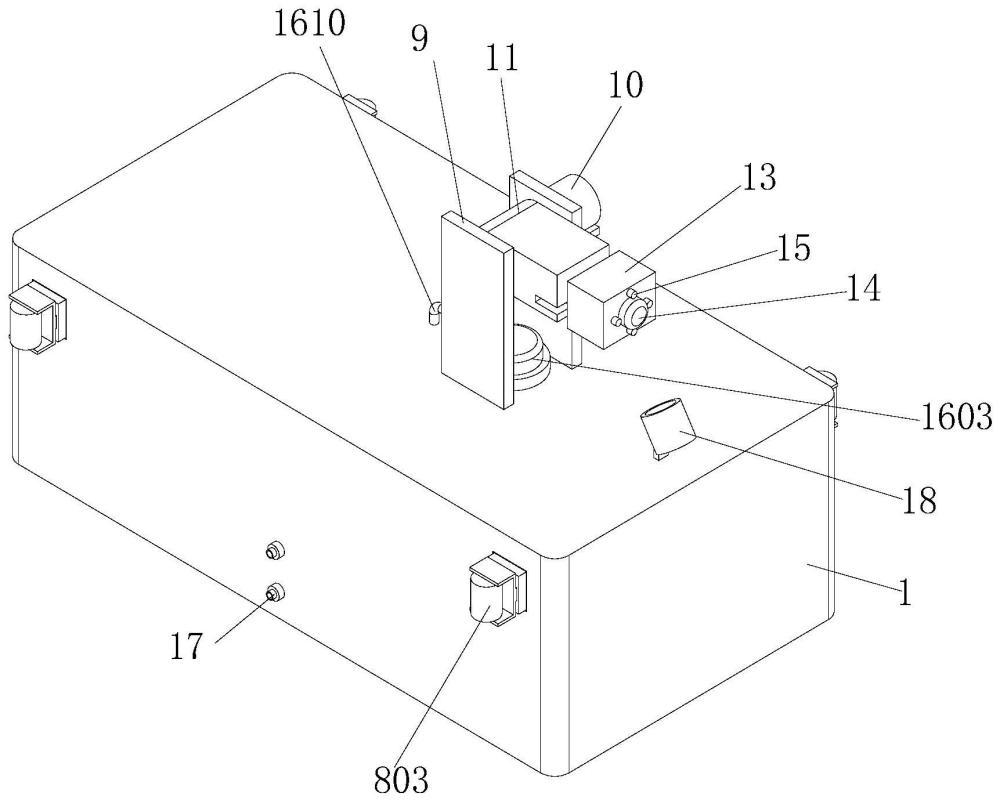
图中:1、支撑座;2、第一马达;3、第一锥齿轮;4、第二锥齿轮;5、第一丝杠;6、第二马达;7、第二丝杠;8、辅助移动机构;801、支架;802、压缩弹簧;803、驱动滚轮;9、支板;10、第三马达;11、第一转块;12、第四马达;13、第二转块;14、摄像头;15、探照灯;16、自清洁机构;1601、第五马达;1602、第二转轴;1603、海绵擦;1604、第一圆齿轮;1605、第二圆齿轮;1606、第三丝杠;1607、套筒;1608、压板;1609、储水槽;1610、喷水管道;1611、塑料挡片;17、电动水阀;18、吹风通道;19、风机;20、滤网;21、电池组;22、信号传输器。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-7,本发明提供一种技术方案:一种自适应管道的管道爬行机器人,如图1、图2、图3、图5和图6所示,包括支撑座1和第三马达10,支撑座1内部两侧对称转动连接有第一锥齿轮3,第一锥齿轮3的两侧对称啮合连接有第二锥齿轮4,第二锥齿轮4的外侧固定有第一丝杠5,支撑座1内部两侧对称转动连接有第二丝杠7,支撑座1内部两侧对称固定有第一马达2,且第一马达2的输出端与第一锥齿轮3相连接,支撑座1内部两侧对称固定有第二马达6,且第二马达6的底部与第二丝杠7相连接,第二丝杠7可在第二马达6的作用下旋转,对应的支架801向下移动,方便调节支撑座1的高度,第一锥齿轮3可在第一马达2的作用下旋转,方便带动对应两个第二锥齿轮4同时旋转,以此带动对应的两个第一丝杠5同时旋转,对应的支架801向外移动,对应的驱动滚轮803最终抵紧在管道正中间的内壁上,之后所有的驱动滚轮803紧贴在管道内壁上滚动,以此驱动该装置行走。
如图1、图3和图5所示,第一丝杠5的外侧和第二丝杠7的外侧均螺纹连接有辅助移动机构8,辅助移动机构8包括支架801,且支架801螺纹连接在第一丝杠5的外侧和第二丝杠7的外侧,支架801滑动连接在支撑座1的两侧和支撑座1的底部,且支架801的外侧通过压缩弹簧802与驱动滚轮803相连接,第二丝杠7旋转时,对应的支架801可在支撑座1和第一丝杠5的限位作用下向下移动,方便调节支撑座1的高度,第一丝杠5旋转时,对应的支架801可在支撑座1和第一丝杠5的限位作用下滑动,驱动滚轮803最终在压缩弹簧802的顶撑作用下紧贴在管道的内壁上,驱动滚轮803可驱动该装置行走。
如图2、图3和图6所示,支撑座1上端面的两侧对称固定有支板9,支板9之间转动连接有第一转块11,第一转块11的一侧转动连接有第二转块13,第三马达10固定在其中一个支板9的外侧,且第三马达10的输出端与第一转块11相连接,第一转块11内固定有第四马达12,且第四马达12的底部与第二转块13相连接,第一转块11可在第三马达10的作用下旋转,方便调节摄像头14的角度,第二转块13可在第四马达12的作用下旋转,方便调节摄像头14的方向。
如图4所示,第二转块13的一侧固定有摄像头14和探照灯15,探照灯15设置有四个,且四个探照灯15周向均匀分布在第二转块13上,利用摄像头14监控管道内环境的同时可打开探照灯15,探照灯15可起到照明的作用,使监控画面更加明亮,同时使用四个探照灯15可使照明效果更好。
如图3和图5、图6图7所示,支撑座1内活动连接有自清洁机构16,,自清洁机构16包括第五马达1601,且第五马达1601固定在支撑座1的内部,第五马达1601的顶部通过第二转轴1602与海绵擦1603相连接,且第二转轴1602的外侧固定有第一圆齿轮1604,且第一圆齿轮1604的一侧啮合连接有第二圆齿轮1605,第二圆齿轮1605的底部固定有第三丝杠1606,且第三丝杠1606的外侧螺纹连接有套筒1607,套筒1607滑动连接在支撑座1上,且套筒1607的底部固定有压板1608,在使用该装置之前需要向储水槽1609内通水,顺时针90度旋转第一转块11之后,第二转轴1602可在第五马达1601的作用下旋转,从而带动第三丝杠1606旋转,此时压板1608可在支撑座1和第三丝杠1606的限位作用下向下移动,方便自动压水,水最终通过喷水管道1610喷到海绵擦1603上,同时海绵擦1603随着第二转轴1602一起旋转,方便自动清洁摄像头14。
进一步的,支撑座1内开设有储水槽1609,压板1608伸入储水槽1609内,支撑座1上固定有喷水管道1610,且喷水管道1610的首端伸入储水槽1609内,喷水管道1610的首端内固定有塑料挡片1611,且塑料挡片1611周向均匀分布在喷水管道1610上,支撑座1的前侧固定有电动水阀17,且电动水阀17与储水槽1609相贯通,电动水阀17设置有两个,两个电动水阀17分别用来向储水槽1609内通水以及向外排水,压板1608向下压水时,水通过喷水管道1610喷出,周向均匀分布的塑料挡片1611可起到防倒流的作用,保证喷水管道1610内的水只能单向流动。
如图3和图6所示,支撑座1的顶部固定有吹风通道18,吹风通道18内固定有风机19,吹风通道18呈倾斜状,且吹风通道18的底部内固定有滤网20,利用海绵擦1603清洗好摄像头14之后,第一转块11转回至水平状态,接着吹风通道18对着摄像头14吹风,方便自动风干摄像头14,滤网20对外部杂质起到隔离阻挡的作用。
如图3所示,支撑座1内固定有电池组21,且电池组21的顶部固定有信号传输器22,电池组21电性连接有第一马达2、第二马达6、驱动滚轮803、第三马达10、第四马达12、摄像头14、探照灯15、第五马达1601、风机19和信号传输器22,电池组21可在逆变器的作用下将直流电变为交流电供整个装置使用,以此保证该装置的正常运作,搭配使用信号传输器22和外部控制系统可实现远程操控的效果。
工作原理:在使用该自适应管道的管道爬行机器人时,首先将该装置放置在管道内,再向储水槽1609内通水,第二丝杠7旋转,对应的支架801向下移动,直至前后驱动滚轮803到达管道的水平中轴面上,接着第一锥齿轮3旋转,以此带动对应的两个第二锥齿轮4旋转,对应的第一丝杠5随之旋转,以此伸展出对应的支架801,前后驱动滚轮803最终在压缩弹簧802的顶撑作用下抵紧在管道的内壁上,驱动滚轮803紧贴在内壁上滚动,以此驱动该装置行走,摄像头14可监控管道内部环境,探照灯15可发挥照明的功能,第一转块11可旋转,方便调节摄像头14的角度,第二转块13可单独旋转,方便调节摄像头14的方向,若需要清洁摄像头14,则先旋转第一转块11并使摄像头14对准海绵擦1603,接着第二转轴1602和海绵擦1603整体旋转,第一圆齿轮1604随着第二转轴1602一起旋转,从而带动第二圆齿轮1605和第三丝杠1606整体旋转,压板1608向下移动并压水,水最终通过喷水管道1610喷出,以此湿润海绵擦1603,方便自动清洁摄像头14,完成清洁操作之后再将第一转块11转至水平状态,接着风机19对着摄像头14吹风,以此自动风干摄像头14,本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为便于描述本发明的简化描述,而不是指示或暗指所指的装置或元件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本发明保护内容的限制。
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种管道机器人自适应框架及其在管道内的工作方法
- 一种管道爬行机器人
- 一种用于管道爬行的反恐机器人
- 核电站用自适应管道爬行机构及管道爬行设备
- 一种具有管径自适应功能的智能cctv管道爬行机器人