一种汽车座椅泡沫自动识别机器人消音蜡喷涂系统及方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及机器人追踪装置技术领域,特别涉及一种汽车座椅泡沫自动识别机器人消音蜡喷涂系统及方法。
背景技术
现阶段,在汽车座椅泡沫消音蜡喷涂过程中,喷涂罐内的消音蜡原料混料的方式是通过人工操作进行,人工操作时,消音蜡与水的配比往往不够精确,且在加料、混料操作过程中,容易造成原料溅出,从而会造成工位周边环境的污染,消音蜡也会因为水与蜡的配比不精确的原因,造成泡沫产品与汽车座椅骨架产生摩擦发出异响。
消音蜡是一种蓝色粘性液体,用于减少泡沫产品与金属骨架摩擦的异响,具有水性溶剂,环保型,适用所有体系的特点,由蜡、树脂的水乳浊液。目前的汽车行业主要采用传统传送设备配合人工进行喷涂,生产效率低,人工成本高,且产品合格率低,消音蜡的供料系统需要不断的进行搅拌,防止其凝固等问题。
现有技术中的大部分设备,需要人工安装工件,对操作人员有一定技术要求。汽车行业目前消音蜡喷涂设备,自动化程度不高仍旧需要人工参与,无法对喷涂质量进行准确把控。
发明内容
本发明的目的克服现有技术存在的不足,为实现以上目的,采用一种汽车座椅泡沫自动识别机器人消音蜡喷涂系统及方法,以解决上述背景技术中提出的问题。
一种汽车座椅泡沫自动识别机器人消音蜡喷涂系统,所述喷涂系统包括传送组件、第一光电感应、视觉识别装置、喷涂组件,以及控制组件;
所述传送组件包括pom传送带,以及设置于pom传送带的传输带电机;
所述第一光电感应设置于pom传送带侧边,且所述视觉识别装置设置于pom传送带的上端;
所述喷涂组件包括设置于pom传送带侧边的喷涂机器人,以及设置于喷涂机器人活动端的喷胶枪;
所述控制组件包括设置于pom传送带侧边的安全区域、设置于喷涂机器人底端的控制电磁阀,以及设置于喷涂机器人侧端的补料隔膜泵。
作为本发明的进一步的方案:所述喷涂系统还设置有用于吸收喷涂时产生的废料的排风装置。
作为本发明的进一步的方案:所述视觉识别装置采用基恩士智能相机。
作为本发明的进一步的方案:所述传输带电机采用G120变频器,且设置有增量式编码器。
作为本发明的进一步的方案:所述喷胶枪采用高精度喷枪。
第二方面的技术方案:一种适用于上述任一项所述的一种汽车座椅泡沫自动识别机器人消音蜡喷涂系统的方法,包括以下步骤:
步骤S1、将工件在pom传送带后匀速运行,当工件到达相应位置触发第一光电感应,通过视觉识别装置实时采集图片信息,并将工件种类,以及及摆放角度信息传送至喷涂机器人;
步骤S2、当工件到达喷涂机器人追踪设定的区域时,喷涂机器人对工件进行追踪;
步骤S3、当工件到达喷涂机器人设定的工作范围内,根据增量式编码器传输的数值传送至喷涂机器人;
步骤S4、喷涂机器人获取当前位置,控制喷涂机器人同步追踪,并基于plc程序运算调用程序控制喷涂机器人对工件进行精准喷涂的加工任务。
与现有技术相比,本发明存在以下技术效果:
采用上述的技术方案,通过各个部件的互相组合,工件放置在pom传送带上传输,当工件切割光电开关感应线时,智能相机进行图像捕捉分析,识别工件类型状态,plc程序进行分析计算,调用合适的程序控制机器人,机器人在程序控制下,用不同程序的喷胶枪进行消音蜡的喷涂。利用相应装置和结构的设计,从而实现解决目前消音蜡喷涂设备,自动化程度不高需要人工参与,且无法对喷涂质量进行准确把控的问题。
附图说明
下面结合附图,对本发明的具体实施方式进行详细描述:
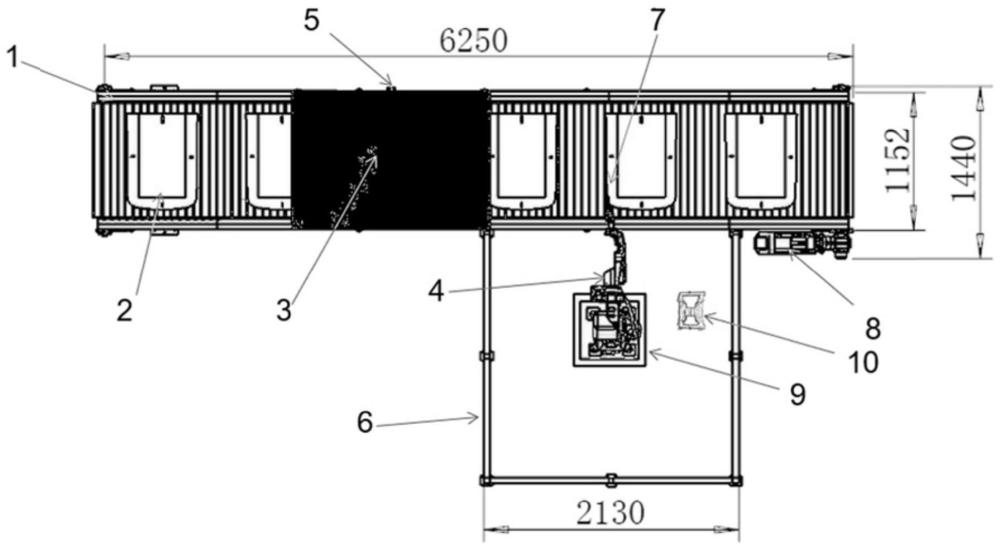
图1为本申请公开实施例的消音蜡喷涂系统的结构示意图;
图2为本申请公开实施例的喷涂机器人工位布局示意图。
图中:1、pom传送带;2、工件;3、视觉识别装置;4、喷涂机器人;5、第一光电感应;6、安全区域;7、喷胶枪;8、传输带电机;9、控制电磁阀;10、补料隔膜泵。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参考图1,本发明实施例中,一种汽车座椅泡沫自动识别机器人消音蜡喷涂系统,所述喷涂系统包括传送组件、第一光电感应5、视觉识别装置3、喷涂组件,以及控制组件,所述喷涂系统还设置有用于吸收喷涂时产生的废料的排风装置,排风装置不断吸收喷涂产生的废料,从而避免依赖人工,从而有利于废料通过排风系统进行收集处理。
本实施例中,所述视觉识别装置3采用基恩士智能相机。
所述传送组件包括pom传送带1,以及设置于pom传送带1的传输带电机8,所述传输带电机8采用G120变频器,且设置有增量式编码器;
所述第一光电感应5设置于pom传送带1侧边,且所述视觉识别装置3设置于pom传送带1的上端;
所述喷涂组件包括设置于pom传送带1侧边的喷涂机器人4,以及设置于喷涂机器人4活动端的喷胶枪7,所述喷胶枪7采用高精度喷枪;
所述控制组件包括设置于pom传送带1侧边的安全区域6、设置于喷涂机器人4底端的控制电磁阀9,以及设置于喷涂机器人4侧端的补料隔膜泵10。
本实施例中,还有设置有一些控制柜、排尘设备、连接装置、兑料桶,部件均为通用标准件。
第二方面的技术方案:一种适用于上述任一项所述的一种汽车座椅泡沫自动识别机器人消音蜡喷涂系统的方法,包括以下步骤:
步骤S1、将工件2在pom传送带1后匀速运行,当工件2到达相应位置触发第一光电感应5,通过视觉识别装置3实时采集图片信息,并将工件2种类,以及及摆放角度信息传送至喷涂机器人4;
步骤S2、当工件2到达喷涂机器人4追踪设定的区域时,喷涂机器人4对工件2进行追踪;
步骤S3、当工件2到达喷涂机器人4设定的工作范围内,根据增量式编码器传输的数值传送至喷涂机器人4;
如图2所示,图示为喷涂机器人4工位布局示意图;机器人编写程序块,程序主要功能是报警、输入输出数据的传输、机器人与相机交互信息,相机采集产品信息传送给机器人,机器人根据相机的拍摄位置计算出X\Y轴的数据从而做偏移机器人的位置坐标轨迹。
步骤S4、喷涂机器人4获取当前位置,控制喷涂机器人4同步追踪,并基于plc程序运算调用程序控制喷涂机器人4对工件2进行精准喷涂的加工任务。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定,均应包含在本发明的保护范围之内。
- 一种喷涂辅助装置的使用方法及喷涂机器人
- 一种工件的自动喷涂方法及其自动喷涂装置、喷涂系统
- 一种基于双目视觉的工件喷涂方法、喷涂装置及喷涂系统
- 一种三足机器人的自动识别与追踪方法
- 一种汽车座椅泡沫自动识别消音蜡喷涂设备
- 一种全封闭式汽车座椅泡沫消音蜡喷涂装置