锻炼器材系统和使用方法
文献发布时间:2024-01-17 01:28:27
相关申请的交叉引用
本申请是于2020年9月28日提交的美国专利申请序列号17/034,950的部分继续申请并要求了该美国专利申请的优先权,该申请的全部内容通过引用并入本文。
技术领域
本发明总体上涉及锻炼器材,并且更具体地涉及一种锻炼器材系统,该锻炼器材系统允许结合多个附接件并且允许多种构造,从而允许使用者利用一台器材进行多种锻炼。
背景技术
锻炼器材在本领域是众所周知的,并且是为使用者提供各种功能以从事一项或更多项锻炼的有效手段。例如,图1描述了常规的锻炼系统101,该锻炼系统具有框架103,该框架被构造成对具有手柄109的臂105进行支撑,臂105以可枢转的方式连接107到该框架。在使用期间,使用者可以在使用臂105的同时增加重量和/或阻力。
与系统101有关的常见问题之一是使用受限。例如,使用者只能用该系统进行有限数量的锻炼。然后,使用者将继续使用另一装置或器材来完成其他锻炼。
因此,尽管在锻炼器材系统的领域中已经取得了巨大的进步,但仍有许多不足之处。
附图说明
被认为是本申请实施方式特点的新颖特征在所附权利要求中阐述。然而,当结合附图进行阅读时,通过参考以下详细描述,将最好地理解本发明的实施方式本身以及优选的使用模式及其另外的目的和优点,其中:
图1是常见锻炼器材系统的等距视图;
图2是根据本发明的一种或更多种实施方式的锻炼器材系统的正面立体图;
图3是图2的锻炼器材系统的背面立体图;
图4是图2的锻炼器材系统的承载件的特写视图;
图5是图2的锻炼器材系统的承载件的第二特写视图;
图6是图2的系统的握持支撑件的特写视图;
图7是图2的锻炼器材系统的正面立体图,例示了与杆臂联接的一对三轴附接件;
图8是根据本发明的一种或更多种实施方式的替代性一对杆臂的正面立体图;
图9是根据本发明的一种或更多种实施方式的替代性锻炼器材系统的正面立体图;
图10是图9的锻炼器材系统的背面立体图;
图11是图9的适于腿推举锻炼的锻炼器材系统的立体图;
图12是图9的适于坐姿长凳(seated bench,坐卧)推举锻炼的锻炼器材系统的立体图;
图13是根据本发明的一种或更多种实施方式的、具有腿弯举附接件的另一锻炼器材系统的正面立体图;
图14是图13的适于俯卧腿弯举锻炼的锻炼器材系统的背面立体图;
图15是图13的适于坐姿腿屈伸锻炼的锻炼器材系统的正面立体图;
图16是图13的适于站姿腿弯举锻炼的锻炼器材系统的正面立体图;
图17是根据本发明的一种或更多种实施方式的、具有三头肌杠附接件的图13的锻炼器材系统的正面立体图,例示了适于站姿三头肌屈伸锻炼的锻炼器材系统;
图18是具有替代性三头肌杠附接件的图13的锻炼器材系统的正面立体图,例示了适于坐姿斜托弯举锻炼的锻炼器材系统;
图19是图18的锻炼器材系统的正面立体图,适于坐姿三头肌屈伸锻炼;
图20是根据本发明的一种或更多种实施方式的图13的锻炼器材系统的侧面立体图,例示了用于将凳椅联接至其上的替代性主承载件,该凳椅被定位为用于闭式腿屈伸锻炼;
图21是图20的锻炼器材系统的侧面立体图,例示了凳椅被定位为用于斜托弯举锻炼;
图22是图20的锻炼器材系统的侧面立体图,例示了凳椅被定位为用于平板腿屈伸锻炼;以及
图23是图20的锻炼器材系统的侧面立体图,例示了凳椅被定位为用于坐姿腿屈伸锻炼。
尽管本申请的系统和使用方法易于受到各种修改和替代形式的影响,但其具体实施方式已在附图中以示例方式示出,并在本文中进行了详细描述。然而,应理解的是,本文对具体实施方式的描述并不意在将本发明限制在所公开的特定实施方式中,而是相反,其意在涵盖落入如所附权利要求所限定的本申请精神和范围内的所有修改、等效物和替代物。
具体实施方式
下面提供本申请的系统和使用方法的例示性实施方式。当然将理解的是,在任何实际实施方式的开发中,将做出许多特定于实现方式的决定以实现开发者的特定目的,诸如遵守与系统相关和与业务相关的约束,这将因不同的实现方式而不同。此外将理解的是,这样的开发工作可能是复杂且耗时的,但对于受益于本公开的本领域普通技术人员来说仍将是常规工作。
根据本申请的系统和使用方法克服了通常与常规锻炼器材系统相关联的一个或更多个上述问题。具体地,本发明提供了一种锻炼器材系统,该系统利用提供了臂的多方向移动的承载件并且利用允许各种装置附接的多个附接系统,这些特征允许使用者根据需要操纵器材来进行多种锻炼。本系统和使用方法的这些和其他独特特征将在下面讨论并在附图中加以例示。
根据附图并结合所附描述,将在其结构和操作两方面理解本系统和使用方法。本文介绍了该系统的若干实施方式。应理解的是,不同实施方式的各种部件、零件和特征可以组合在一起和/或相互交换,所有这些都在本申请的范围内,即使在附图中没有示出所有的变化和特定实施方式。还应理解的是,本文明确设想了各种实施方式之间的特征、元件和/或功能的混合和匹配,因此本领域的普通技术人员将从本公开中理解到,一种实施方式的特征、元件和/或功能可以酌情并入另一种实施方式,除非另有描述。
本文描述的优选实施方式并不意在穷举或将本发明限制在所公开的精确形式上。选择和描述优选实施方式是为了解释本发明的原理及其应用和实际使用,以使本领域的其他技术人员能够遵循其教导。
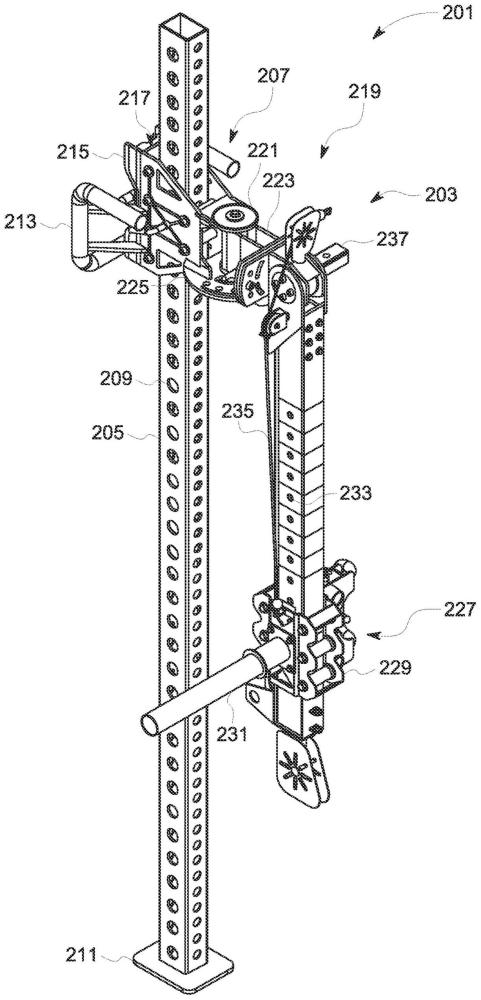
现在参考附图,其中相似的附图标记在若干视图中标识了相应或相似的元件,图2描述了根据本申请的优选实施方式的锻炼器材系统201的正面立体图。将理解的是,系统201克服了通常与常规锻炼系统相关联的一个或更多个上述问题。还应理解的是,系统201可以根据功能、制造或美学考虑的需要而变化。
在设想的实施方式中,锻炼器材系统201包括多个杆臂203,多个杆臂通过承载件207联接到多个竖向支柱205。应理解的是,竖向支柱205至少有一部分可以来自史密斯机、功能训练器具等。此外,竖向支柱205可以包括多个调节孔209,该调节孔用于接收不同的配件或附接件(例如,承载件207)。此外,竖向支柱205可以在其下端部处包括用于将竖向支柱205锚固至地面的底板211。
承载件207被构造成通过多个调节孔209沿着竖向支柱205上下调节。承载件207包括用于使用者操纵的一个或更多个手柄213。承载件207还包括第一支架215,该第一支架形成通道217以与一个或更多个竖向支柱205接合。承载件207还包括从第一支架215延伸出来的枢转系统219。枢转系统219包括附接到第二支架223的侧向(side to side,侧部到侧部的)枢转连接件221。侧向枢转连接件221允许第二支架223绕着水平轴线枢转,从而允许杆臂203的水平移动。枢转系统219还包括附接到第二支架223的旋转连接件225。旋转连接件225允许杆臂203侧向枢转。
锻炼器材系统201还包括握持系统227,该握持系统通过附接装置229联接到杆臂203。附接装置229包括用于使用者操纵的手柄231。杆臂203还包括多个调节孔233,多个调节孔用于握持系统227的附加可调节性。
锻炼器材系统201还包括线缆系统235,该线缆系统提供了对可以用于各种锻炼的各种装置进行的附接和操纵。此外,一个或更多个突起部237从杆臂203延伸出来,也用于这种接合。
应理解的是,本申请的被认为是独特特征之一的是承载件207,该承载件提供了杆臂203的各种操纵,从而提供了各种锻炼构造和用途。例如,承载件207允许杆臂203在竖向上、在侧向上和枢转方向上进行调节。
还应理解的是,由于可以通过承载件207进行各种调节,锻炼器材系统201适合于添加可以提供多种锻炼的附接件装置。使用附接件可以继续进行所有的锤式强度或赛佰斯杠杆类型的运动,诸如下斜胸部推举、胸部推举、上斜胸部推举、颈前推举、高位下拉和划船运动的所有变型、俯卧撑等。腿推举脚踏板附接件允许杆臂以相反的形式对接,从而成为45度腿推举,这是任何其他腿推举脚踏板都无法做到的。脚踏板附接件也可以转动,以允许臂成为竖向腿推举或与杠杆臂配对,然后进行所有杠杆腿推举运动,并取代所有这些机器。通过使用相反形式角度的脚踏板,肩部全背垫附接件允许臂成为钟摆式深蹲机。相同的附接件以其他方式使用可以允许臂成为哈克深蹲、雪橇蹲、V字深蹲。肩垫附接件允许臂成为专业深蹲机。三轴单手柄附接件可以用于执行许多上述动作,并通过允许对手柄进行最终调节来确认几乎任何杆、杠杆或史密斯机运动。平衡线缆附接件允许杠杆臂及其承载件附接至杆臂线缆,然后成为平衡器以执行所有平衡锻炼,如辅助引体向上或俯卧撑。缓冲垫附接件可以用于使臂成为腿屈伸、腿弯举、腰部屈伸、坐姿腹部前屈机等。弧形杠附接件可以使臂变成斜托弯举、过头三头肌屈伸等。史密斯直杠允许臂使用承载件系统来作为史密斯机使用。单手柄可以用于执行单侧史密斯式功能、以及单侧杆和杠杆动作。这种设计也可以修改为使用堆叠的配重物和线缆,它允许同样的运动和机器功能,但不需要配重板。
在锻炼器材系统201的操作期间,使用者将加装期望的附接件并进行期望的锻炼。根据需要,使用者可以切换附接件并继续进行训练。
在图3中,为了清楚起见,示出了锻炼器材系统201的背面立体图。如图所示,承载件207包括锁定销301,该锁定销以可移除的方式将承载件固定至竖向支柱205的期望位置处。承载件207还包括一组锁定销303,该组锁定销以可移除的方式将杆臂203固定至第二支架223。本图中还示出了第二手柄305,该第二手柄是握持系统227的一部分,提供了方便的使用者操纵。
在图4和图5中,示出了承载件207的近视图。如图所示,杆臂203通过侧向枢转连接件221处于移位的位置。如图所示,旋转连接件225允许绕水平轴线移动到期望位置。还如所示,旋转连接件225包括第一板401和第二板403,该第一板和第二板相对于彼此枢转并通过一组锁定销303固定到适当位置,在图5中描绘了这种旋转运动。还如所示,线缆系统229可以包括顶部线缆支撑件405。
在图6中,示出了握持系统227的近视图。如图所示,该握持系统还可以包括线缆附接点601,该线缆附接点允许附接可以用于各种锻炼的各种线缆。
在图7中,锻炼器材系统201的正面立体图例示了一对三轴附接件701,该三轴附接件通过附接装置703联接到杆臂203。如图所示,三轴附接件701包括从附接装置703延伸出来的水平杠705和第一旋转连接件707。第一旋转连接件707允许水平杠705沿着竖向轴线上下枢转。
三轴附接件701还包括与水平杠705的自由端部联接的第二旋转连接件709和第三旋转连接件711。第二旋转连接件709允许手柄713侧向枢转。第三旋转连接件711允许手柄713沿着竖向轴线上下枢转。此外,水平杠705包括多个附接孔715,以提供三轴附接件701的附加可调节性。
在图8中,描绘了替代性的一对杆臂801的正面立体图。杆臂801包括附接装置803,该附接装置将杆臂801联接至竖向支柱(未示出)。附接装置803包括用于允许杆臂801上下枢转的旋转连接件805。
杆臂801还包括滑车(trolley,滚轮)807,该滑车通过多个调节孔809以可移除的方式固定至杆臂。滑车807包括一个或更多个附接点811,以接收和保持可以用于各种锻炼的各种装置。此外,滑车807包括用于使用者操纵的一个或更多个手柄813。
杆臂801还包括在杆臂之间延伸的水平杠815。水平杠815包括一对手柄817,手柄被构造成沿着水平杠815移动。在优选的实施方式中,线缆系统819连接附接装置803和手柄817以增加阻力。手柄817还可以包括锁定销821,该锁定销用于通过多个调节孔823将手柄817以可移除的方式固定至水平杠815。
杆臂801还包括线缆附接点825,该线缆附接点允许附接可以用于各种锻炼的各种线缆。
在图9中,描绘了根据本申请的替代性锻炼器材系统901的正面立体图。应理解的是,锻炼器材系统901可以根据功能、制造或美学考虑的需要而变化。在优选的实施方式中,锻炼器材系统901包括第二系统(未示出,见图9),该第二系统模仿本文讨论的系统,从而提供至少两个臂以供使用。
在设想的实施方式中,锻炼器材系统901包括杆臂903和配重堆叠臂905,该杆臂和配重堆叠臂通过主承载件909联接到竖向支柱907。应理解的是,竖向支柱907至少有一部分可以来自史密斯机、功能训练器具等,并且可以包括多个销孔911。此外,应理解的是,主承载件可以通过多个销孔911沿着竖向支柱907上下调节。
杆臂903包括具有多个销孔915的第一柱913、与第一柱913相邻的一个或更多个杆件917、多个J形钩状件919和滑车921。滑车921被构造成通过一个或更多个线性支承件(未示出)以及一个或更多个杆件917沿着第一柱913上下滑动。在优选的实施方式中,一个或更多个杆917是由铝制成的。滑车921还包括一个或更多个锁定销923,以通过多个销孔915将滑车921以可移除的方式固定至第一柱913。应理解的是,多个销孔915允许使用者将滑车921沿着第一柱913调节到期望高度。此外,滑车921包括一个或更多个附接点925,该附接点被构造成接收和保持可以用于各种锻炼的各种装置。此外,滑车921包括一个或更多个锁定螺栓927,该锁定螺栓被构造成以可移除的方式将各种装置固定至滑车921。
锻炼器材系统901还包括覆盖杠929,该覆盖杠被构造成通过一个或更多个附接点931覆盖J形钩状件919。在一些实施方式中,覆盖杠929可以在腿推举锻炼期间用作止动件。
应理解的是,在使用期间,使用者可以将杆臂903从竖向支柱907脱离,并通过一个或更多个锁定销933将杆臂903与主承载件909接合。
在图10中,为了清楚起见,示出了锻炼器材系统901的背面立体图。如图所示,配重堆叠臂905包括具有多个销孔1003的第二柱1001。配重堆叠臂905还包括配重承载件1005、用于一个或更多个配重物1009的附接的一个或更多个杠铃1007。配重承载件1005被构造成通过线缆系统1011沿着第二柱1001上下移动。应理解的是,配重承载件1005用作锻炼器材系统901的主阻力臂。
线缆系统1011包括多个线缆附接点1013,该线缆附接点允许附接可以用于各种锻炼(例如,高端功能训练器、低端功能训练器、滑轮、坐姿长凳推举等)的各种线缆。线缆系统1011还包括一个或更多个球状止动件1015,该球状止动件对线缆的收回进行控制。
在图11中,描绘了适于腿推举锻炼的锻炼器材系统901的立体图。如图所示,系统901以及模仿该系统901的第二系统与锻炼器具1101接合。如图所示,腿推举板1103可以通过一个或更多个附接点925与滑车921联接。应理解的是,腿推举板1103相对于系统901是能够调节角度的。此外,还可以采用长凳1105,以使使用者能够用系统901做各种锻炼。
在图12中,描绘了适于坐姿长凳推举锻炼的锻炼器材系统901的立体图。如图所示,系统901以及模仿该系统901的第二系统与锻炼器具1201接合。如图所示,在系统901与第二系统之间采用了长凳1203。此外,水平杠1205通过一个或更多个附接点925与滑车921联接。此外,闩锁1207将配重堆叠臂905与锻炼器具1201的竖向支柱907牢固地锁定在适当的位置。杆臂903通过一个或更多个锁定销1209以与竖向支柱907成约90度的方式定位在主承载件909内。在使用期间,当使用者坐在长凳1203上时,使用者握持水平杠1205,然后推拉水平杠1205,如方向箭头所示。当水平杠1205被向前推时,滑车921沿着杆臂903行进,以及一个或更多个配重物1009通过线缆系统1011在第二柱1001上向上移动。当水平杠1205被拉向使用者时,滑车921沿着杆臂903行进,以及一个或更多个配重物1009通过线缆系统1011在第二柱1001上向下移动。
现在参考图13至图23,示出了根据本发明的一种或更多种实施方式的另一锻炼器材系统1301的各种视图。应理解的是,锻炼器材系统1301可以根据功能、制造或美学考虑的需要而变化。
在设想的实施方式中,锻炼器材系统1301包括杆臂1303和配重堆叠臂1305,该杆臂和配重堆叠臂通过主承载件1309联接到竖向支柱1307。应理解的是,竖向支柱1307至少有一部分可以来自史密斯机、功能训练器具等,并且可以包括多个销孔1311。此外,应理解的是,主承载件1309可以通过多个销孔1311沿着竖向支柱1307上下调节。
杆臂1303包括具有多个销孔1315的第一柱1313。杆臂还包括通过一个或更多个锁定销1319以可移除的方式固定至该杆臂的滑车1317。应理解的是,多个销孔1315允许使用者将滑车1317沿着第一柱1313调节到期望高度。
在一些实施方式中,滑车1317被构造成接收和保持可以用于各种锻炼的各种附接件。例如,如图13至图16所示,腿弯举附接件1321被联接到滑车1317。在使用期间,使用者可以将长凳(例如,1401、1501、1601)放置在锻炼器材系统1301附近,以使用腿弯举附接件1321分别进行俯卧腿部锻炼、坐姿腿屈伸锻炼和站姿腿弯举锻炼,如图14至图16所示。
在另一示例中,如图17所示,三头肌杠附接件1701被联接到滑车1317。在使用期间,使用者可以进行站姿三头肌屈伸锻炼。
在另一示例中,如图18和图19所示,替代性三头肌杠附接件1801被联接至滑车1317。在使用期间,使用者可以将长凳(例如1803、1901)放置在锻炼器材系统1301附近,以分别进行坐姿斜托弯举锻炼和坐姿三头肌屈伸锻炼。
杆臂1303还包括旋转连接件1323,该旋转连接件用于允许杆臂1303相对于竖向支柱1307上下枢转。
配重堆叠臂1305包括第二柱1325,该第二柱具有多个销孔1327以用于可调节性。配重堆叠臂1305被构造成相对于竖向支柱1307上下枢转。配重堆叠臂1305还包括配重承载件1329,该配重承载件通过一个或更多个锁定销1319以可移除的方式固定至该配重堆叠臂。应理解的是,多个销孔1327允许使用者沿着第二柱1325将配重承载件1329调节到期望高度。配重承载件1329包括一个或更多个杠铃1331,该杠铃用于附接一个或更多个配重物2001(如图20至图23所示)。
在替代性实施方式中,锻炼器材系统1301包括替代性主承载件2003,该替代性主承载件将杆臂1303和配重堆叠臂1305联接到竖向支柱1307,如图20至图23所示。主承载件2003被构造成接收和保持各种装置,诸如可以用于各种锻炼的凳椅2005。例如,在使用期间,使用者可以进行闭式腿屈伸锻炼(见图20)、斜托弯举锻炼(见图21)、平板腿屈伸锻炼(见图22)、以及坐姿腿屈伸锻炼(见图23)。
上面公开的特定实施方式仅是例示性的,因为对受益于本文教导的本领域技术人员而言明显的是,可以以不同但等效的方式对实施方式进行修改和实施。因此显而易见的是,上面公开的特定实施方式可以被改变或修改,并且所有这些变化都被认为是在本申请的范围和精神之内。因此,本文寻求的保护如描述中所述。尽管本发明的实施方式如上所示,但它们并不局限于这些实施方式,而是可以在不脱离其精神的情况下进行各种改变和修改。
- 救援器材车用器材管理系统及救援器材车
- 一种具有腰部保健功能的腿部肌肉锻炼装置及其使用方法
- 与办公椅靠背配合使用的脖颈锻炼器材及使用方法
- 一种于工位使用的腰部锻炼器材及使用方法