用于校准激光扫描仪的方法和技术设施
文献发布时间:2024-01-17 01:28:27
技术领域
本发明涉及一种用于借助至少一个反射单元校准车辆的激光扫描仪的方法,反射单元用于反射激光扫描仪的激光束。本发明还涉及一种设计用于实施根据本发明的方法的技术设施/技术设备。
背景技术
车辆、尤其是自动驾驶车辆、例如自行驶移动运输系统是已知的,其具有一个或多个激光扫描仪。这样的移动运输系统例如用于在技术设施内运输物体。技术设施尤其是指工业应用、例如生产工厂。激光扫描仪发射激光束,检测反射的激光束,并由此计算与反射激光束的对象的距离。激光扫描仪尤其用于为自动驾驶车辆识别技术设施中的障碍物。
车辆的激光扫描仪应被取向为,使得由激光扫描仪发射的激光束尽可能平行于车辆所在地面伸延。因此实现,激光束不会被地面反射,而是被环境中的对象、尤其是障碍物反射。这样的对象然后可以用于车辆的定位和导航。将激光扫描仪取向为使得激光束平行于地面、即水平地伸延被称为激光扫描仪的校准。
从DE 10 2004 033 114 A1已知一种用于校准距离图像传感器的方法。为此,使用一种装置,该装置包括具有三个校准面的校准对象。
DE 101 16 278A1公开了一种用于调准布置在车辆上的距离传感器的方法。为此,使用一种具有三个参考对象的装置。
从JP 2009-168472 A已知一种用于校准激光扫描仪的方法。在此,激光扫描仪布置在具有多个反射面的反射单元的前面。由激光扫描仪发射的激光束被反射面反射。
发明内容
本发明的目的在于,改进一种用于校准车辆的激光扫描仪的方法和一种技术设施。
该目的通过具有在权利要求1中说明的特征的用于校准激光扫描仪的方法来实现。有利的设计方案和改进方案是从属权利要求的主题。该目的通过具有在权利要求13中说明的特征的技术设施来实现。
根据用于借助至少一个用于反射激光扫描仪的激光束的反射单元校准车辆的激光扫描仪的根据本发明的方法,所述至少一个反射单元包括第一护板、第二护板和屏蔽件。在此,第一护板沿射束方向布置在第二护板和屏蔽件之间,第一护板具有至少近似垂直于射束方向延伸的第一反射面,第二护板具有至少近似垂直于射束方向延伸的第二反射面,屏蔽件具有至少近似垂直于射束方向延伸的第三反射面。第一护板沿竖直方向与第二护板错开地布置成,使得在第一护板和第二护板之间形成间隙,该间隙沿竖直方向和横向方向延伸,屏蔽件被设计和布置为,使得间隙沿射束方向的投影落到屏蔽件的第三反射面上。激光扫描仪的取向以如下方式被检查,即:使激光扫描仪的激光束至少近似在射束方向上对准所述至少一个反射单元,并使激光束在横向方向上沿着所述至少一个反射单元运动,并且对于激光束在横向方向上的多个位置,分别测量激光扫描仪与对激光束进行反射的反射面的距离,并从所测得的激光扫描仪与相应反射面的距离确定激光扫描仪的取向,其中,在激光扫描仪错误取向时修正激光扫描仪的取向和/或给出修正指令。修正指令例如被传输到中央计算机或传输给操作人员。
竖直方向垂直于射束方向。竖直方向也垂直于横向方向。射束方向也垂直于横向方向。在此使用的方向说明、即竖直方向、横向方向和射束方向分别基于反射单元来定义。垂直于竖直方向伸延的任何方向在下文也被称为水平方向。因此,横向方向和射束方向是水平方向。竖直方向也至少近似垂直于地面,所述至少一个反射单元立在该地面上,并且车辆位于该地面上。将激光扫描仪取向为使得激光扫描仪的激光束沿水平方向伸延被称为激光扫描仪的校准。
在校准期间,车辆的激光扫描仪或者说扫描平面沿竖直方向距地面具有规定的间距。第一护板和第二护板优选被取向为,使得间隙、尤其是间隙的中心沿竖直方向距地面具有与激光扫描仪的扫描平面相同的规定间距。激光扫描仪到第二反射面的距离小于激光扫描仪到第一反射面的距离。激光扫描仪到第一反射面的距离小于激光扫描仪到第三反射面的距离。
当激光束到达第一屏蔽件时,激光束被第一屏蔽件的第一反射面反射。当激光束到达第二屏蔽件时,激光束被第二屏蔽件的第二反射面反射。当激光束到达间隙时,激光束被屏蔽件的第三反射面反射。
激光扫描仪的取向由所测得的激光扫描仪到相应反射面的距离确定。如果激光束被第一屏蔽件的第一反射面反射,则激光扫描仪沿竖直方向向上倾斜,即远离地面地倾斜。如果激光束被第二屏蔽件的第二反射面反射,则激光扫描仪沿竖直方向向下倾斜,即朝地面倾斜。如果激光束被屏蔽件的第三反射面反射,则激光束沿水平方向伸延,并且激光扫描仪水平地取向。
在校准期间,激光扫描仪也在射束方向上与所述至少一个反射单元相距一个规定的距离。在此,激光扫描仪在射束方向上到反射单元的距离明显大于反射单元在横向方向上的伸展尺寸。激光扫描仪到反射面的中心区域的距离因此仅不明显地小于激光扫描仪到该反射面的边缘区域的距离。因此,激光扫描仪在射束方向上到反射单元的反射面的距离可被视为近似恒定。如果激光扫描仪在射束方向上到反射单元的距离与反射单元在横向方向上的伸展尺寸处于相似的数量级中,那么所述的近似不够精确。在该情况下适用的是,将由激光扫描仪提供的极坐标、即辐射角度和距离换算为笛卡尔坐标、即在横向方向上的位置和在射束方向上的距离。
因此,根据本发明的方法能够校准车辆的激光扫描仪,其中,车辆尤其是自动驾驶车辆、例如自行驶移动运输系统。借助激光扫描仪,自动驾驶车辆尤其能够识别障碍物。根据本发明的方法需要相对小的空间,能够在激光扫描仪的校准中实现相对高的精度,并且需要相对少的时间耗费。
根据本发明的优选的改进方案,以规定的、尤其是周期性的时间间隔重复对激光扫描仪的取向的检查。在每次检查后,在激光扫描仪的取向错误的情况下,对激光扫描仪的取向进行修正和/或给出供修正指令。修正指令例如被传输到中央计算机或操作人员。例如在车辆在技术设施中运行时,定期、例如每天进行重复的检查。在此,重复的检查尤其是自动进行。在此,车辆朝所述至少一个反射单元运动,并自动执行对激光扫描仪的取向的检查。如果激光扫描仪的取向是正确的,那么车辆向中央计算机给出相应的消息,并且又返回到正常运行。因此,可迅速识别激光扫描仪的错误的取向。
根据本发明的优选的设计方案,激光扫描仪的取向以如下方式被修正,即:将激光扫描仪调节为,使得激光束在沿横向方向运动期间穿过间隙到达第三反射面。于是,激光扫描仪的激光束在水平方向上伸延。
根据本发明的有利的设计方案,在检查激光扫描仪的取向之前,确定车辆所在的地面的倾斜度。在此,所述至少一个反射单元被取向为,使得间隙在竖直方向上与激光扫描仪处于相同的高度。例如,使用数字水平仪来确定地面的倾斜度,可见的点激光在数字水平仪的端部处逸出。
根据本发明的有利的改进方案,所确定的激光扫描仪的取向以光学和/或声学方式被示出。因此,光学和/或声学地示出,激光扫描仪是否在竖直方向上向上、即远离地面地倾斜,或者激光扫描仪是否在竖直方向上向下、即朝地面倾斜,或者激光器扫描仪是否水平地取向。此外有利地,所确定的激光扫描仪的取向被传输到中央计算机。
根据本发明的有利的改进方案,使激光扫描仪的激光束至少近似于在第一反射单元的射束方向上对准第一反射单元,并使激光束在第一反射单元的横向方向上沿着第一反射单元运动,并且对于激光束在该横向方向上的多个位置,分别测量激光扫描仪与第一反射单元的反射激光束的反射面的距离。也使激光扫描仪的激光束至少近似于在第二反射单元的射束方向上对准第二反射单元,并使激光束在第二反射面的横向方向上沿着第二反射单元运动,并且对于激光束在该横向方向上的多个位置,分别测量激光扫描仪与第二反射单元的反射激光束的反射面的距离。在此,第一反射单元和第二反射单元被取向为,使得第一反射单元的竖直方向平行于第二反射单元的竖直方向。
通过两个反射单元相对于彼此的这种布置,针对激光扫描仪的激光束的不同的辐射角度并且基于两个水平的、相互正交的轴线执行激光扫描仪的校准。如果激光束到达这两个反射单元的间隙,则激光束被这两个反射单元的屏蔽件的第三反射面反射。于是,激光扫描仪的激光束在水平方向上的超过90°的角度范围内伸延。
根据本发明的有利的设计方案,第一反射单元和第二反射单元被取向为,使得第一反射单元的射束方向至少近似垂直于第二反射单元的射束方向。通过两个反射单元彼此间的这种至少近似垂直的错开,针对激光扫描仪的激光束的不同的辐射角度并且基于两个水平的、相互正交的轴线执行激光扫描仪的校准。
根据本发明的有利的设计方案,第一反射单元和第二反射单元被取向为,使得第一反射单元的射束方向至少近似平行于第二反射单元的横向方向。通过两个反射单元彼此间的这种至少近似垂直的错开,针对激光扫描仪的激光束的不同的辐射角度并且基于两个水平的、相互正交的轴线执行激光扫描仪的校准。
有利地,第一反射单元和第二反射单元被取向为,使得第一反射单元的间隙和第二反射单元的间隙在竖直方向上彼此齐平/相互对齐。如果两个反射单元立于共同的地面上,则反射单元的间隙因此距离地面一样远,并且激光扫描仪的激光束到达两个反射单元的两个间隙。
优选地,屏蔽件的第三反射面在竖直方向上的伸展尺寸大于间隙在竖直方向的伸展尺寸,并且屏蔽件的第三反射面在横向方向上的伸展尺寸大于间隙在横向方向上的伸展尺寸。此时,间隙在射束方向上的投影完全落到屏蔽件的第三反射面上。因此,相对于射束方向稍微倾斜地到达间隙的激光束也还落到屏蔽件的第三反射面上。
根据本发明的有利的设计方案,所述至少一个反射单元具有第一内支脚、第二内支脚、第一外支脚和第二外支脚,这些支脚在横向方向上彼此错开地布置并且主要在竖直方向上延伸。在此,第一护板和第二护板在横向方向上在内支脚之间延伸,而屏蔽件在横向方向上在外支脚之间延伸。当激光束到达反射单元的支脚时,激光束被反射单元的相应的支脚反射。由此,能够以较高的精度校准激光扫描仪。此外,支脚还用于护板的机械固定。
根据本发明的有利的改进方案,第一护板包括具有第四反射面的凸出部,该第四反射面至少近似垂直于射束方向延伸。在此,第四反射面布置为在射束方向上与第一反射面错开。由此简化激光扫描仪的校准。尤其地,由于第四反射面相对于第一反射面的错开,能简单地确定光束是落在第一护板上还是落在第二护板上。
有利地,所述至少一个反射单元具有至少一个间隔件,间隔件布置为,使得第一护板和屏蔽件布置为在射束方向上以第一间距彼此错开。由此,能够以较高的精度校准激光扫描仪。此外,所述至少一个间隔件可以用于屏蔽件的机械固定。
根据本发明的有利的改进方案,第一护板的第一反射面和/或第二护板的第二反射面被黑色的泡沫材料覆盖。根据本发明的有利的改进方案,至少使与反射单元的间隙相邻的第一护板的边缘和/或第二护板的边缘被黑色的泡沫材料覆盖。
根据本发明的技术设施包括至少一个具有激光扫描仪的车辆,和用于反射激光扫描仪的激光束的至少一个反射单元。在此,技术设施被设计用于实施根据本发明的方法。技术设施尤其是工业应用、例如生产工厂。
本发明并不局限于权利要求的特征组合。对于本领域技术人员来说,尤其是从任务提出和/或通过与现有技术的比较而提出的任务中得到权利要求和/或各个权利要求特征和/或说明书特征和/或附图特征的另外的有意义的组合的可能性。
附图说明
现在借助附图详细解释本发明。本发明并不局限于在附图中示出的实施例。这些附图示仅示意性表示本发明的主题。其中:
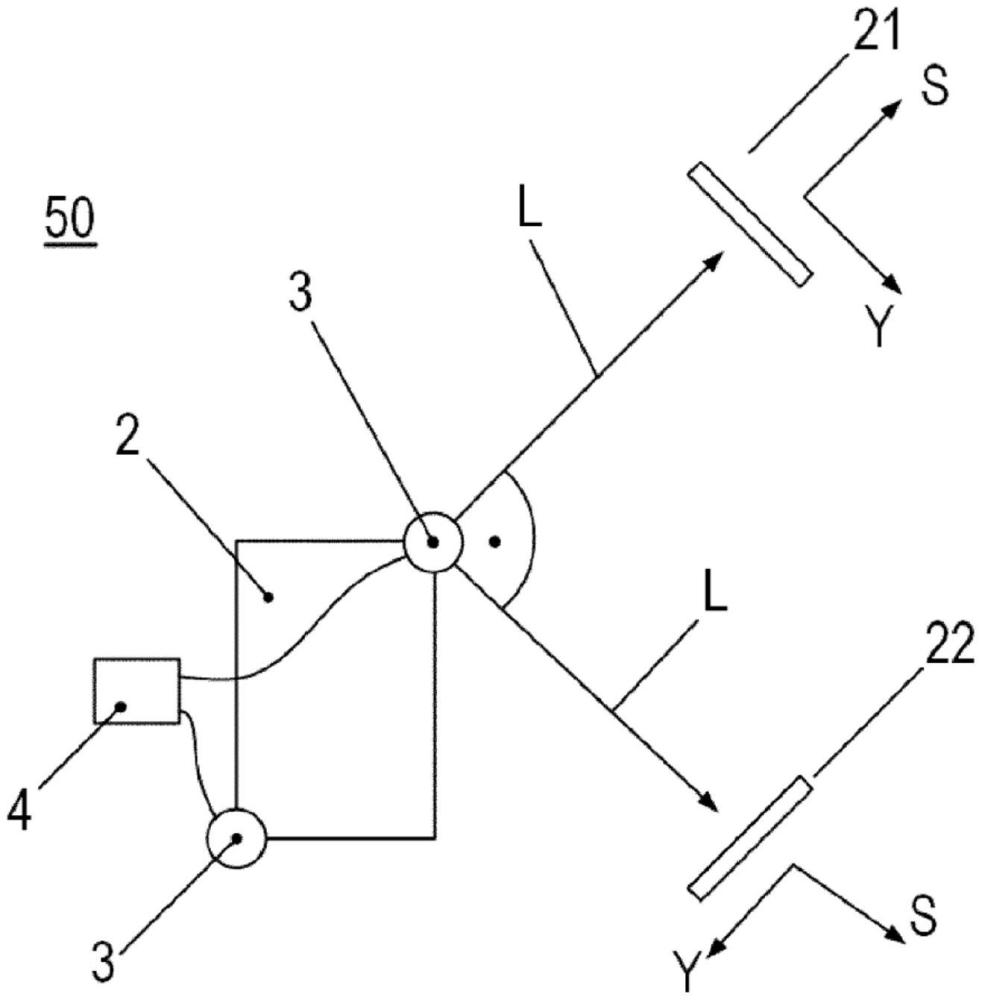
图1示出了用于校准激光扫描仪的装置的示意图,
图2示出了反射单元的透视图,
图3示出了反射单元的前视图,
图4示出了具有测得的距离的第一曲线图,
图5示出了具有测得的距离的第二曲线图,
图6示出了具有测得的距离的第三曲线图,
图7示出了具有测得的距离的第四曲线图,
图8示出了具有测得的距离的第五曲线图。
具体实施方式
图1示出了用于校准车辆2的激光扫描仪3的装置的示意图。车辆2在此是自动驾驶车辆2,尤其是自行驶移动运输系统。车辆2具有近似矩形的平面图。在车辆2的两个对角而置的角部处分别布置有激光扫描仪3。每个激光扫描仪3发射激光束L,检测反射的激光束L,并由此计算到对激光束L进行反射的对象的距离D。由激光扫描仪3发射的每个激光束L在大约270°的角度范围内运动。
激光扫描仪3与数字计算机4连接。在激光扫描仪3的校准期间,数据、尤其是关于所测得的到对象的距离D的数据从激光扫描仪3传输到数字计算机4。数字计算机4根据所测得的距离D确定激光扫描仪3的取向,并以光学和声学方式示出所确定的激光扫描仪3的取向。
该装置包括用于反射激光扫描仪3的激光束L的第一反射单元21和用于反射激光扫描仪3的激光束L的第二反射单元22。车辆2和反射单元21、22在此立于平的地面50上。反射单元21、22是反射激光束L的对象。
反射单元21、22中的每个反射单元具有至少近似垂直于相应的射束方向S延伸的前侧。相应的横向方向Y垂直于相应的射束方向S。相应的竖直方向Z垂直于相应的射束方向S并垂直于相应的横向方向Y。所提到的方向说明、即竖直方向Z、横向方向Y和射束方向S分别基于相应的反射单元21、22来定义。在此,反射单元21、22的竖直方向Z彼此平行并且垂直于反射单元21、22和车辆2所在的地面50。
反射单元21、22中的每个反射单元被取向为,使得由车辆2的激光扫描仪3发射的、在相应的横向方向Y上居中地射到相应的反射单元21、22的前侧上的激光束L至少近似沿相应的射束方向S伸延。即,激光束L在特定的辐射角度中至少近似垂直地射到相应的反射单元21、22的前侧上。
第一反射单元21的射束方向S至少近似垂直于第二反射单元22的射束方向S。第一反射单元21的射束方向S至少近似平行于第二反射单元22的横向方向Y。因此,激光束L至少近似垂直地射到第一反射单元21的前侧上的辐射角度因此相对于激光束L至少近似垂直地射到第二反射单元22的前侧上的辐射角度错开至少近似90°。
图2示出了图1所示的第一反射单元21的透视图。两个反射单元21、22相同地设计。反射单元21包括第一护板7、第二护板8和屏蔽件5。第一护板7在射束方向S上布置在第二护板8与屏蔽件5之间。第一护板7和屏蔽件5布置为在射束方向S上彼此错开第一距离。第一护板7和第二护板8布置为在射束方向S上彼此错开第二距离。第一护板7在竖直方向Z上相对于第二护板8错开地布置。在此,第二护板8布置为比第一护板7更靠近地面50。
第一护板7具有第一反射面31,该第一反射面至少近似垂直于射束方向S延伸。第二护板8具有第二反射面32,该第二反射面同样也至少近似垂直于射束方向S延伸。屏蔽件5具有第三反射面33,该第三反射面也至少近似垂直于射束方向S延伸。
反射单元21具有第一内支脚61、第二内支脚62、第一外支脚63和第二外支脚64。支脚61、62、63、64主要在竖直方向Z上延伸。护板7、8固定在两个内支脚61、62上。支脚61、62、63、64在横向方向Y上彼此错开地布置。第一支脚61、63通过横杆65相互连接。第二支脚62、64也通过横杆65相互连接。
在内支脚61、62上分别安置有间隔件10。间隔件10布置为,使得第一护板7和屏蔽件5布置为在射束方向S上彼此错开第一距离。
第一护板7包括凸出部40,该凸出部40具有第四反射面34。第四反射面34垂直于射束方向S延伸。第四反射面34布置为在射束方向S上与第一反射面31错开。例如,第四反射面34在射束方向S上布置在第一反射面31和第二反射面32之间,或者第四反射面34与第二反射面32齐平。
图3示出了反射单元21的前视图、即前侧的视图。第一护板7在竖直方向Z上与第二护板8错开地布置成,使得在第一护板7和第二护板8之间形成间隙9,该间隙沿竖直方向Z和横向方向Y延伸。在横向方向Y上,间隙9由两个内支脚61、62限界。图1所示的第一反射单元21和第二反射单元22被取向为,使得第一反射单元21的间隙9和第二反射单元22的间隙9在竖直方向Z上彼此齐平。
屏蔽件5设计和布置为,使得间隙9在射束方向S上的投影完全落在屏蔽件5的第三反射面33上。屏蔽件5的第三反射面33在竖直方向Z上的伸展尺寸大于间隙9在竖直方向Z上的伸展尺寸,并且屏蔽件5的第三反射面33在横向方向Y上的伸展尺寸大于间隙9在横向方向Y上的伸展尺寸。
屏蔽件5在横向方向Y上在外支脚63、64之间延伸。因此,在这里所示的图示中,屏蔽件5的第三反射面33分别在第一支脚61、63之间以及在第二支脚62、64之间可见。屏蔽件5在竖直方向Z上从地面50延伸到第一护板7的上边缘。第一护板7落座在地面50上。
为了校准图1所示的激光扫描仪3中的一个激光扫描仪,使该激光扫描仪3的激光束L对准反射单元21、22。在此,激光束L在横向方向Y上沿着反射单元21、22运动。在此,激光束L走过一个辐射角度区域。激光束L在横向方向Y上的每个位置P在此对应于激光束L的一个特定的辐射角度。对于激光束L在横向方向Y上的多个位置P,分别测量激光扫描仪3到反射激光束L的反射面31、32、33的距离D。随后,根据测得的距离D确定激光扫描仪3的取向。
在横向方向Y上在反射单元21、22的中心,激光束L至少近似沿射束方向S伸延,并且在那里至少近似垂直地射到反射单元21、22上。如果激光扫描仪3在射束方向S上到反射单元21、22的距离明显大于反射单元21、22在横向方向Y上的伸展尺寸,那么激光束L的辐射角度与激光束L在横向方向Y上的位置P近似成正比。如果这种近似是不足够精确的,那么将由激光扫描仪3提供的极坐标、即辐射角度和距离D换算为笛卡尔坐标、即在横向方向Y上的位置P和在射束方向S上的距离D。
图4示出了所测得的距离D随激光束L在横向方向Y上的位置P变化的第一曲线图。激光束L的位置P在此被分为七个区段B1、B2、B3、B4、B5、B6、B7。
在所有七个区段B1、B2、B3、B4、B5、B6、B7中,激光束L射到地面50上。激光束L被地面50漫反射。激光束L亦即向下倾斜地伸延,因此激光扫描仪3错误地取向,即取向过低。
图5示出了所测得的距离D随激光束L在横向方向Y上的位置P变化的第二曲线图。激光束L的位置P被分为七个区段B1、B2、B3、B4、B5、B6、B7。
在第一区段B1中,激光束L射到第一外支脚63上并被第一外支脚反射。在第二区段B2中,激光束L在第一外支脚63和第一内支脚61之间经过并射到屏蔽件5上,并被第三反射面33反射。在第三区段B3中,激光束L射到第一内支脚61上并被第一内支脚反射。在第四区段B4中,激光束L在第一内支脚61和第二内支脚62之间射到第二护板8上,并被第二反射面32反射。在第五区段B5中,激光束L射到第二内支脚62上并被第二内支脚反射。在第六区段B6中,激光束L在第二内支脚63和第二外支脚64之间经过并射到屏蔽件5上,并被第三反射面33反射。在第七区段B7中,激光束L射到第二外支脚64上并被第二外支脚反射。亦即激光束L向下倾斜地伸延,因此激光扫描仪3错误地取向、即取向过低。
图6示出了所测得的距离D随激光束L在横向方向Y上的位置P变化的第三曲线图。在此,激光束L的位置P被分为七个区段B1、B2、B3、B4、B5、B6、B7。
在第一区段B1中,激光束L射到第一外支脚63上并被第一外支脚反射。在第二区段B2中,激光束L在第一外支脚63和第一内支脚61之间经过并射到屏蔽件5上,并被第三反射面33反射。在第三区段B3中,激光束L射到第一内支脚61上并被第一内支脚反射。在第四区段B4中,激光束L在第一内支脚61和第二内支脚62之间射到间隙9上,并因此射到屏蔽件5上,并且被第三反射面33反射。在第五区段B5中,激光束L射到第二内支脚62上并被第二内支脚反射。在第六区段B6中,激光束L在第二内支脚63和第二外支脚64之间经过,射到屏蔽件5上,并被第三反射面33反射。在第七区段B7中,激光束L射到第二外支脚64上并被第二外支脚反射。亦即,激光束L在水平方向上伸延,因此激光扫描仪3被正确地取向。
图7示出了所测得的距离D随激光束L在横向方向Y上的位置P变化的第四曲线图。激光束L的位置P在此被分为七个区段B1、B2、B3、B4、B5、B6、B7。
在第一区段B1中,激光束L射到第一外支脚63上并被第一外支脚反射。在第二区段B2中,激光束L在第一外支脚63和第一内支脚61之间经过,射到屏蔽件5上,并被第三反射面33反射。在第三区段B3中,激光束L射到第一内支脚61上并被第一内支脚反射。在第四区段B4中,激光束L在第一内支脚61和第二内支脚62之间射到第一护板7上,并被第一反射面31反射。然而,在第四区段B4的中心区域中,激光束L射到凸出部40上并被第四反射面34反射。在第五区段B5中,激光束L射到第二内支脚62上并被第二内支脚反射。在第六区段B6中,激光束L在第二内支脚63和第二外支脚64之间经过,射到屏蔽件5上,并被第三反射面33反射。在第七区段B7中,激光束L射到第二外支脚64上并被第二外支脚反射。亦即,激光束L向上倾斜地伸延,因此激光扫描仪3错误地取向、即取向过高。
图8示出了所测得的距离D随激光束L在横向方向Y上的位置P变化的第五曲线图。激光束L的位置P在此被分为七个区段B1、B2、B3、B4、B5、B6、B7。
在第一区段B1中,激光束L射到第一外支脚63上并被第一外支脚反射。在第二区段B2中,激光束L在第一外支脚63和第一内支脚61之间经过,并且不被反射单元21、22反射。在第三区段B3中,激光束L射到第一内支脚61上,并被第一内支脚反射。在第四区段B4中,激光束L在第一内支脚61和第二内支脚62之间经过,并且不被反射单元21、22反射。在第五区段B5中,激光束L射到第二内支脚62上并被第二内支脚反射。在第六区段B6中,激光束L在第二内支脚63和第二外支脚64之间经过,并且不被反射单元21、22反射。在第七区段B7中,激光束L射到第二外支脚64上并被第二外支脚反射。亦即,激光束L向上倾斜地伸延,因此激光扫描仪3错误地取向、即取向过高。
附图标记列表:
2 车辆
3 激光扫描仪
4 数字计算机
5 屏蔽件
7 第一护板
8 第二护板
9 间隙
10 间隔件
21 第一反射单元
22 第二反射单元
31 第一反射面
32 第二反射面
33 第三反射面
34 第四反射面
40 凸出部
50 地面
61 第一内支脚
62 第二内支脚
63 第一外支脚
64 第二外支脚
65 横杆
B1 第一区段
B2 第二区段
B3 第三区段
B4 第四区段
B5 第五区段
B6 第六区段
B7 第七区段
D 距离
L 激光束
P 位置
S 射束方向
Y 横向方向
Z 竖直方向。
- 可自校准的远距离激光校准轴及其校准方法
- 用于激光雷达系统的激光扫描仪和用于运行激光扫描仪的方法
- 用于校准激光扫描仪的设备和方法