基于像素值变化的血管分割方法、装置、设备和存储介质
文献发布时间:2024-01-17 01:28:27
技术领域
本申请涉及医学图像技术领域,特别是涉及一种基于像素值变化的血管分割方法、装置、设备和存储介质。
背景技术
脑卒中,也称为脑中风,是由于大脑里面的血管突然发生破裂出血或因血管狹窄堵塞造成大脑缺血,缺氧引起的。在脑卒中相关检查方法中,需要依靠大量的颅内血管医学图像。对颅内血管的提取分割有助于医生对病情的分析诊断。在诊疗过程中,每日查看分析大量的颅内血管同时对病情作出准确的判断,对医生是一种挑战。同时颅内血管分支较多且结构复杂,有时仅通过人眼,对病情有一定的几率误判漏判,因而造成的耽误治疗,病情加重,将给病人家属以及社会带来极大的负担。
发明内容
基于此,有必要针对上述技术问题,提供一种能够简单且快速实现血管分割的基于像素值变化的血管分割方法、装置、设备和存储介质。
一种基于像素值变化的血管分割方法,所述方法包括:
获取待进行血管分割的二维影像数据,所述二维影像数据包括按时间排序的多帧造影图像;
采用多种滤波方式对所述二维影像数据逐帧进行空间维度的滤波,再对所述二维影像数据中每一帧造影图像结合当前帧的前一帧以及后一帧造影图像进行时间维度的滤波,得到滤波后的二维影像数据;
在所述滤波后的二维影像数据中,统计每一个像素点位置对应各帧造影图像上的不同像素值,构建每一个像素点位置对应的像素值变化曲线;
根据所述像素值变化曲线得到多个指标参数,并对各指标参数赋予预设权重后进行计算,得到每个像素点位置的综合判定指数;
根据所有像素点位置的综合判定指数构建得到综合判定指数的直方图分布,对所述直方图分布和对应区间采用自适应全局阈值处理得到最佳阈值;
在各帧造影图像上根据最佳阈值对每个像素点进行二分类处理,得到所述二维影像数据的血管分割图像。
在其中一实施例中,所述采用多种滤波方式对所述二维影像数据逐帧进行空间维度的滤波包括:
依次采用中值滤波、最小值滤波、高斯滤波以及高通滤波逐帧对造影图像进行滤波。
在其中一实施例中,所述再对所述二维影像数据中每一帧造影图像结合当前帧的前一帧以及后一帧造影图像进行时间维度的滤波包括:
计算当前帧、当前帧的前一帧和后一帧造影图像中每一个像素点与相邻像素点之间的像素差值,并根据三帧造影图像中相同位置处像素点与相邻像素点之间的差值进行计算得到像素变化平均值;
在当前帧造影图像上的每一个像素点加上对应的像素变化平均值以实现对当前帧的时间滤波。
在其中一实施例中,计算当前帧、当前帧的前一帧和后一帧造影图像中每一个像素点与相邻像素点之间的差值时:
所述相邻像素点包括处于某一像素点不同方位的多个,计算像素点与每一个方位相邻像素点之间的差值,得到多个差值;
根据三帧造影图像中相同位置处像素点与处于相同方位的相邻像素点之间的差值求平均,对应得到多个方位的相邻像素点平均值;
对多个方位的相邻像素点平均值进行求平均计算,得到所述像素变化平均值。
在其中一实施例中,所述根据所述像素点变化曲线得到多个指标参数包括:
提取每一条像素值变化曲线上的均值、极差、方差、最小值以及最大值;
根据所有像素值变化曲线上的最小值和最大值进行计算,得到全局最大值和全局最小值;
根据所述全局最大值和全局最小值进行计算得到全局阈值,根据所述全局阈值统计出每条像素曲线上低于所述全局阈值的帧数数量;
将所述低于所述全局阈值的帧数数量、均值、极差以及方差作为每条像素变化曲线的指标参数。
在其中一实施例中,所述方法还包括在得到所述二维影像数据的血管分割数据之后,还对所述血管分割数据进行优化,包括:
在所述二维影像数据中选取符合预设条件的一帧作为关键帧,并对所述关键帧进行滤波处理;
将滤波后的关键帧和所述血管分割数据作为水平集的输入,以所述血管分割数据为起点,以所述关键帧为参照不断迭代,在所述关键帧中将血管进行分离;
对进行血管分离后的关键帧中的各像素点进行二值化处理得到优化后的血管分割图像。
在其中一实施例中,所述在所述二维影像数据中选取符合预设条件的一帧作为关键帧包括:
对所述二维影像数据进行减影处理后,将其中各帧造影图像中的最小像素值乘以修正系数得到对应的判定阈值;
统计每一帧造影图像中低于所述判定阈值的像素个数,将低于所述判定阈值像素个数最多的一帧造影图像作为所述关键帧。
一种基于像素值变化的血管分割装置,所述装置包括:
二维影像数据获取模块,用于获取待进行血管分割的二维影像数据,所述二维影像数据包括按时间排序的多帧造影图像;
二维影像数据滤波模块,用于采用多种滤波方式对所述二维影像数据逐帧进行空间维度的滤波,再对所述二维影像数据中每一帧造影图像结合当前帧的前一帧以及后一帧造影图像进行时间维度的滤波,得到滤波后的二维影像数据;
像素值变化曲线构建模块,用于在所述滤波后的二维影像数据中,统计每一个像素点位置对应各帧造影图像上的不同像素值,构建每一个像素点位置对应的像素值变化曲线;
综合判定指数计算模块,用于根据所述像素值变化曲线得到多个指标参数,并对各指标参数赋予预设权重后进行计算,得到每个像素点位置的综合判定指数;
最佳阈值得到模块,用于根据所有像素点位置的综合判定指数构建得到综合判定指数的直方图分布,对所述直方图分布和对应区间采用自适应全局阈值处理得到最佳阈值;
血管分割数据得到模块,用于在各帧造影图像上根据最佳阈值对每个像素点进行二分类处理,得到所述二维影像数据的血管分割图像。
一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
获取待进行血管分割的二维影像数据,所述二维影像数据包括按时间排序的多帧造影图像;
采用多种滤波方式对所述二维影像数据逐帧进行空间维度的滤波,再对所述二维影像数据中每一帧造影图像结合当前帧的前一帧以及后一帧造影图像进行时间维度的滤波,得到滤波后的二维影像数据;
在所述滤波后的二维影像数据中,统计每一个像素点位置对应各帧造影图像上的不同像素值,构建每一个像素点位置对应的像素值变化曲线;
根据所述像素值变化曲线得到多个指标参数,并对各指标参数赋予预设权重后进行计算,得到每个像素点位置的综合判定指数;
根据所有像素点位置的综合判定指数构建得到综合判定指数的直方图分布,对所述直方图分布和对应区间采用自适应全局阈值处理得到最佳阈值;
在各帧造影图像上根据最佳阈值对每个像素点进行二分类处理,得到所述二维影像数据的血管分割图像。
一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
获取待进行血管分割的二维影像数据,所述二维影像数据包括按时间排序的多帧造影图像;
采用多种滤波方式对所述二维影像数据逐帧进行空间维度的滤波,再对所述二维影像数据中每一帧造影图像结合当前帧的前一帧以及后一帧造影图像进行时间维度的滤波,得到滤波后的二维影像数据;
在所述滤波后的二维影像数据中,统计每一个像素点位置对应各帧造影图像上的不同像素值,构建每一个像素点位置对应的像素值变化曲线;
根据所述像素值变化曲线得到多个指标参数,并对各指标参数赋予预设权重后进行计算,得到每个像素点位置的综合判定指数;
根据所有像素点位置的综合判定指数构建得到综合判定指数的直方图分布,对所述直方图分布和对应区间采用自适应全局阈值处理得到最佳阈值;
在各帧造影图像上根据最佳阈值对每个像素点进行二分类处理,得到所述二维影像数据的血管分割图像。
上述基于像素值变化的血管分割方法、装置、设备和存储介质,通过对待进行血管分割的二维影像数据依次采用空间维度和时间维度的滤波,再利用滤波后的数据构建各像素点位置对应的像素值变化曲线,并通过各像素值变化曲线进行处理得到各像素点位置的综合判定指数,再采用自适应全局阈值处理得到最佳阈值,最后通过最佳阈值对各帧造影图像进行二值化处理,从而将其中的血管部分进行分割,采用本方法可真对血管形态复杂的颅内血管进行分割,同时,该方法简单、快速,且为后续处理提供了精准的血管分割图像。
附图说明
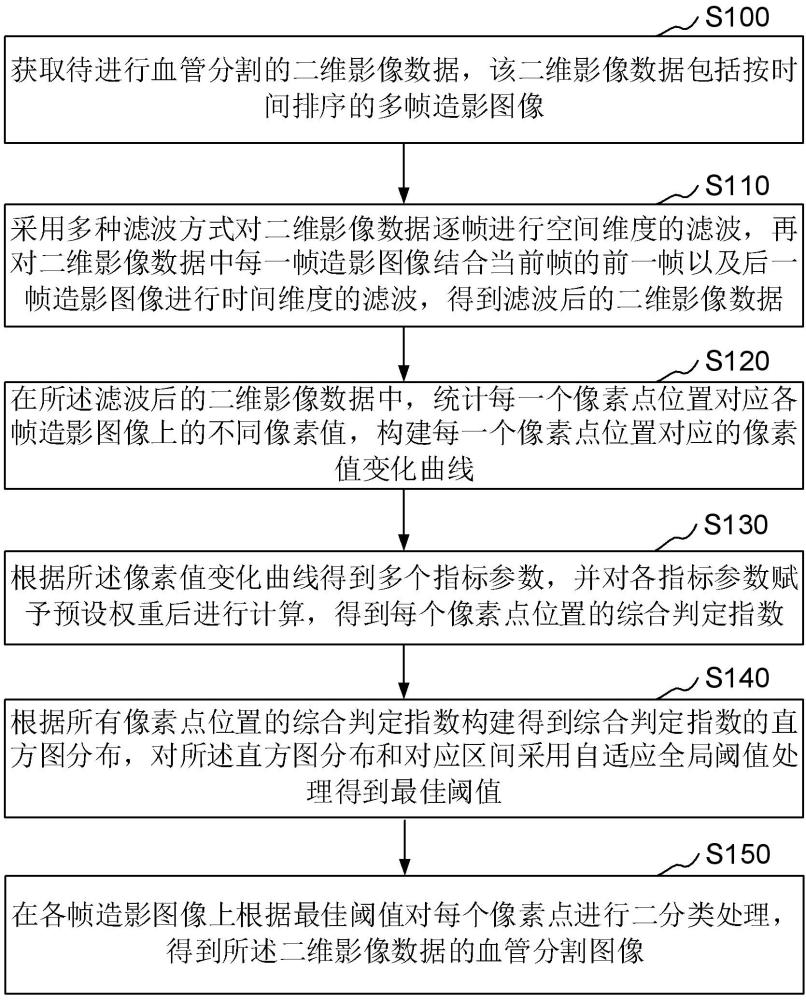
图1为一个实施例中基于像素值变化的血管分割方法的流程示意图;
图2为一个实施例中按时间顺序排列的四张造影图像示意图;
图3为一个实施例中经过空间维度和时间维度两次滤波后的关键帧示意图;
图4为一个实施例中的血管粗分割示意图;
图5为一个实施例中的优化后的血管分割示意图;
图6为一个实施例中基于像素值变化的血管分割装置的结构框图;
图7为一个实施例中计算机设备的内部结构图。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
针对现有技术中,对血管图像进行分割的方法大多都比较复杂,并且其分割的精度依赖于图像质量,而采用深度学习的方法虽然可以有较高的分割精度,但是神经网络的训练又是一个比较漫长的过程,并且应用不够广泛,在本申请中,如图1所示,提供了一种基于像素值变化的血管分割方法,包括以下步骤:
步骤S100,获取待进行血管分割的二维影像数据,该二维影像数据包括按时间排序的多帧造影图像;
步骤S110,采用多种滤波方式对二维影像数据逐帧进行空间维度的滤波,再对二维影像数据中每一帧造影图像结合当前帧的前一帧以及后一帧造影图像进行时间维度的滤波,得到滤波后的二维影像数据;
步骤S120,在滤波后的二维影像数据中,统计每一个像素点位置对应各帧造影图像上的不同像素值,构建每一个像素点位置对应的像素值变化曲线;
步骤S130,根据像素值变化曲线得到多个指标参数,并对各指标参数赋予预设权重后进行计算,得到每个像素点位置的综合判定指数;
步骤S140,根据所有像素点位置的综合判定指数构建得到综合判定指数的直方图分布,对直方图分布和对应区间采用自适应全局阈值处理得到最佳阈值;
步骤S150,在各帧造影图像上根据最佳阈值对每个像素点进行二分类处理,得到所述二维影像数据的血管分割图像。
在本实施例中,提出了一种基于像素值随帧数变化曲线的血管分割方法,该方法是一种计算快捷,结果准确,且适用性广泛的血管分割方法。
在步骤S100中,二维影像数据是指医学影像学中的二维投影图像数据,是通过使用X射线或其他成像技术,将三维解剖结构投影到一个平面上而得到的图像。
在本实施例中,二维影像数据采用数字减影血管造影数据,通过对目标血管注入造影剂后,在一段时间内获取多帧造影图像,得到造影剂在血管中流动情况,从而反应出目标血管的相应状态,如图2中(a)、图2中(b)、图2中(c)、图2中(d)所示。
在图2中,为某实施例的二维影像,血液通过造影剂染色,造影剂流过血管,可将血管在画面中显示出来,显示了造影剂流过血管的过程,不同时间到达了不同的位置。
由于在本方法是基于造影图像本身进行血管的分割,又因拍摄环境、拍摄技术、拍摄设备种类等因素的不同,最后获得的影像质量和影像大小有很大的差异,为了后续计算的实现,需要对二维影像数据逐帧进行统一的图像预处理。
在步骤S110中,为了提高二维影像数据的质量,依次对其进行空间维度的滤波和时间维度的滤波。
在本实施例中,在进行空间维度的滤波时,根据二维影像数据中造影图像的具体状况,可有针对性的采用多种滤波方式对二维影像数据进行逐帧滤波。这里的多种滤波方式是指的采用两种或者两种以上的滤波方式进行滤波,而具体采用何种滤波形式具体根据对造影图像中的噪声种类,噪声数据进行分析后再进行针对性选择。而采用的滤波方式可采用通常应用于图像的滤波方式。
在其中一实施例中,依次采用中值滤波、最小值滤波、高斯滤波以及高通滤波逐帧对造影图像进行滤波,采用这四种滤波方式可以对大多数图像进行去噪平滑的同时保留图像中的重要信息。
具体的,首先用中值滤波消除均匀噪声和椒盐噪声。在针对目标血管为颅内血管时,由于该血管的特殊性,所感兴趣的血管部分相较于背景通常像素值偏小,所以进一步使用最小值滤波来消除较亮的噪声点。接着在不破坏血管成像清晰的情况下,尤其是细小颜色较浅的血管,使用高斯滤波,对图像进行平滑,尽可能去除与血管形态分布相关的噪声且不破坏与血管准确分割所需的信息。由于血管边界对血管的分割起到至关重要的作用,在滤波的最后一步使用进行高通滤波。使用二阶导数锐化图像,利用拉普拉斯算子得到原图像的拉普拉斯图像,再叠加原图像,得到锐化后的图像。这样使得血管图像中的边缘和细节更加清晰。
在本实施例中,在对二维影像数据进行下一步的滤波之前,将其中的所有造影图像的尺寸统一缩放为预设尺寸。
在其中一实施例中,统一缩放尺寸为
在对影像逐帧进行空间滤波后,还需对影像进行时间维度上的滤波。
在本实施例中,对二维影像数据进行时间维度的滤波是指对二维影像数据中每一帧造影图像结合当前帧的前一帧以及后一帧造影图像进行时间维度的滤波,具体包括:计算当前帧、当前帧的前一帧和后一帧造影图像中每一个像素点与相邻像素点之间的差值,并根据三帧造影图像中相同位置处像素点与相邻像素点之间的差值进行计算得到像素变化平均值,再在当前帧造影图像上的每一个像素点加上对应的像素变化平均值以实现对当前帧的时间滤波。
具体的,计算当前帧、当前帧的前一帧和后一帧造影图像中每一个像素点与相邻像素点之间的差值时:相邻像素点包括处于某一像素点不同方位的多个,计算像素点与每一个方位相邻像素点之间的差值,得到多个差值,根据三帧造影图像中相同位置处像素点与处于相同方位的相邻像素点之间的差值求平均,对应得到多个方位的相邻像素点平均值,对多个方位的相邻像素点平均值进行求平均计算,得到像素变化平均值。
在这里需要进行说明的是,当处理二维影像数据的第一帧时,则采用在后一帧的第二帧,两帧一起进行滤波,同理,在处理最后帧时,则选择在前一帧进行滤波。
以相邻像素点处于当前处理像素点的前、后、左、右四个方位为例对时间
维度滤波过程进一步进行说明:对于当前帧中的某个位置的像素点
在本实施例中,在进行相邻像素的选取时可以根据具体情况进行选择,例如,仅选择位于当前处理像素点的上和下方位的两个相邻像素点进行滤波等。
经过空间维度和时间维度两次滤波后的关键帧如图3所示。
在步骤S120中,在得到通过空间滤波,时间滤波的影像后,针对每一个像素点,以帧数变化为横坐标,随帧数变化的像素值为纵坐标,得到该像素点的像素值变化曲线。对每一个像素点进行上述操作,获得保存所有像素点变化曲线。
在步骤S130中,根据像素值变化曲线得到多个指标参数包括:提取每一条像素点变化曲线上的均值、极差、方差、最小值以及最大值,根据所有像素值变化曲线上的最小值和最大值进行计算,得到全局最大值和全局最小值,根据全局最大值和全局最小值进行计算得到全局阈值,根据全局阈值统计出每条像素曲线上低于所述全局阈值的帧数数量,将低于全局阈值的帧数数量、均值、极差以及方差作为每条像素变化曲线的指标参数。
在利用指标参数计算综合判定指数时,由于各指标参数的数值范围的不同以及对实际分割结果的重要性不同,需要赋以不同的权重来进行修正调整。
在本实施例中,采用以下公式计算综合判定指数:
F =
在公式(1)中,
在步骤S140-S150中,获得每一个像素点的综合判定指数F后,可得到综合判定指数的直方图分布。从直方图的数据分布和对应区间,用自适应全局阈值处理,找到最佳阈值,将所有像素点分为两类,将第一类像素点的像素值统一赋为1,作为血管部分;将第二类像素点的像素值赋为0,作为背景部分。即获得了该影像中血管的分割二值图也就是血管粗分割图像,如图4所示。
实际上,经过上述的分割步骤,已经可以实现血管分割了,但是为了可以在该基础上得到更为精准的分割血管二值图,在本方法中还提供了一种对血管分割数据进行优化,包括:在二维影像数据中选取符合预设条件的一帧作为关键帧,并对关键帧进行滤波处理,将滤波后的关键帧和血管分割数据作为水平集的输入,以血管分割数据为起点,以关键帧为参照不断迭代,在关键帧中将血管进行分离,对进行血管分离后的关键帧中的各像素点进行二值化处理得到优化后的血管分割图像,如图5所示。
在本实施例中,在二维影像数据中选取符合预设条件的一帧作为关键帧包括:对二维影像数据进行减影处理后,将其中各帧造影图像中的最小像素值乘以修正系数得到对应的判定阈值,统计每一帧造影图像中低于判定阈值的像素个数,将低于判定阈值像素个数最多的一帧造影图像作为关键帧。
具体的,对影像进行减影操作是指,从第二帧起的每一帧,将造影图像上某点的原像素值减去第一帧的对应位置像素点的像素值,获得新像素值。将新像素值代替该点的原像素值。此操作可以排除颅内影像中一些背景以无关颅内组织的干扰。
在本实施例中,对关键帧进行滤波可采用高斯滤波以消除部分噪声影响。
本申请中所提的方法可以对大部分针对血管进行分割的医学影像,包括但不限于心、脑血管以及颅内血管等,从上述对本方法的说明中可以看出,有部分操作是针对颅内血管这种血管形态比较复杂的医学影像,也就是说本方法应用在大部分的血管分割任务上时均能得到高精度的分割结果,尤其适合应用于处理颅内血管分割任务。
上述基于像素值变化的血管分割方法中,提供了一种专门针对颅内血管的精准分割方法,该方法适用于不同尺寸,拍摄条件,成像效果的颅内血管影像。相比起市面上其他通用的分割算法,本发明更加精准。并且,本方法计算简单快捷方便。不同于市面上其他传统分割算法,完成本算法的时间很快。不同于市面上其他引入人工智能,神经网络的算法,本算法对硬件要求较低,可在各种不同的设备上运行,同时运行使用的价格便宜。相较于神经网络,人工智能的分割算法,本方法不需要前期长时间的训练和大量的临床病例影像作为训练数据,也可以得到精确的分割结果。直接使用本方法,在对病情的判断诊疗时,其分离结果给医生提供了参考依据,有一定的辅助作用。本方法还可以集成在其他软件中,或结合其他需要血管分割为基础的装置,作为数字医疗诊断的一部分,使诊疗更高效,减轻医护人员的负担。
应该理解的是,虽然图1的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,图1中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
在一个实施例中,如图6所示,提供了一种基于像素值变化的血管分割装置,包括:二维影像数据获取模块200、二维影像数据滤波模块210、像素值变化曲线构建模块220、综合判定指数计算模块230、最佳阈值得到模块240和血管分割数据得到模块250,其中:
二维影像数据获取模块200,用于获取待进行血管分割的二维影像数据,所述二维影像数据包括按时间排序的多帧造影图像;
二维影像数据滤波模块210,用于采用多种滤波方式对所述二维影像数据逐帧进行空间维度的滤波,再对所述二维影像数据中每一帧造影图像结合当前帧的前一帧以及后一帧造影图像进行时间维度的滤波,得到滤波后的二维影像数据;
像素值变化曲线构建模块220,用于在所述滤波后的二维影像数据中,统计每一个像素点位置对应各帧造影图像上的不同像素值,构建每一个像素点位置对应的像素值变化曲线;
综合判定指数计算模块230,用于根据所述像素值变化曲线得到多个指标参数,并对各指标参数赋予预设权重后进行计算,得到每个像素点位置的综合判定指数;
最佳阈值得到模块240,用于根据所有像素点位置的综合判定指数构建得到综合判定指数的直方图分布,对所述直方图分布和对应区间采用自适应全局阈值处理得到最佳阈值;
血管分割数据得到模块250,用于在各帧造影图像上根据最佳阈值对每个像素点进行二分类处理,得到所述二维影像数据的血管分割图像。
关于基于像素值变化的血管分割装置的具体限定可以参见上文中对于基于像素值变化的血管分割方法的限定,在此不再赘述。上述基于像素值变化的血管分割装置中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
在一个实施例中,提供了一种计算机设备,该计算机设备可以是终端,其内部结构图可以如图7所示。该计算机设备包括通过系统总线连接的处理器、存储器、网络接口、显示屏和输入装置。其中,该计算机设备的处理器用于提供计算和控制能力。该计算机设备的存储器包括非易失性存储介质、内存储器。该非易失性存储介质存储有操作系统和计算机程序。该内存储器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。该计算机设备的网络接口用于与外部的终端通过网络连接通信。该计算机程序被处理器执行时以实现一种基于像素值变化的血管分割方法。该计算机设备的显示屏可以是液晶显示屏或者电子墨水显示屏,该计算机设备的输入装置可以是显示屏上覆盖的触摸层,也可以是计算机设备外壳上设置的按键、轨迹球或触控板,还可以是外接的键盘、触控板或鼠标等。
本领域技术人员可以理解,图7中示出的结构,仅仅是与本申请方案相关的部分结构的框图,并不构成对本申请方案所应用于其上的计算机设备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。
在一个实施例中,提供了一种计算机设备,包括存储器和处理器,存储器中存储有计算机程序,该处理器执行计算机程序时实现以下步骤:
获取待进行血管分割的二维影像数据,所述二维影像数据包括按时间排序的多帧造影图像;
采用多种滤波方式对所述二维影像数据逐帧进行空间维度的滤波,再对所述二维影像数据中每一帧造影图像结合当前帧的前一帧以及后一帧造影图像进行时间维度的滤波,得到滤波后的二维影像数据;
在所述滤波后的二维影像数据中,统计每一个像素点位置对应各帧造影图像上的不同像素值,构建每一个像素点位置对应的像素值变化曲线;
根据所述像素值变化曲线得到多个指标参数,并对各指标参数赋予预设权重后进行计算,得到每个像素点位置的综合判定指数;
根据所有像素点位置的综合判定指数构建得到综合判定指数的直方图分布,对所述直方图分布和对应区间采用自适应全局阈值处理得到最佳阈值;
在各帧造影图像上根据最佳阈值对每个像素点进行二分类处理,得到所述二维影像数据的血管分割图像。
在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:
获取待进行血管分割的二维影像数据,所述二维影像数据包括按时间排序的多帧造影图像;
采用多种滤波方式对所述二维影像数据逐帧进行空间维度的滤波,再对所述二维影像数据中每一帧造影图像结合当前帧的前一帧以及后一帧造影图像进行时间维度的滤波,得到滤波后的二维影像数据;
在所述滤波后的二维影像数据中,统计每一个像素点位置对应各帧造影图像上的不同像素值,构建每一个像素点位置对应的像素值变化曲线;
根据所述像素值变化曲线得到多个指标参数,并对各指标参数赋予预设权重后进行计算,得到每个像素点位置的综合判定指数;
根据所有像素点位置的综合判定指数构建得到综合判定指数的直方图分布,对所述直方图分布和对应区间采用自适应全局阈值处理得到最佳阈值;
在各帧造影图像上根据最佳阈值对每个像素点进行二分类处理,得到所述二维影像数据的血管分割图像。
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本申请所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(ROM)、可编程ROM(PROM)、电可编程ROM(EPROM)、电可擦除可编程ROM(EEPROM)或闪存。易失性存储器可包括随机存取存储器(RAM)或者外部高速缓冲存储器。作为说明而非局限,RAM以多种形式可得,诸如静态RAM(SRAM)、动态RAM(DRAM)、同步DRAM(SDRAM)、双数据率SDRAM(DDRSDRAM)、增强型SDRAM(ESDRAM)、同步链路(Synchlink) DRAM(SLDRAM)、存储器总线(Rambus)直接RAM(RDRAM)、直接存储器总线动态RAM(DRDRAM)、以及存储器总线动态RAM(RDRAM)等。
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
- 运动像素视频特效添加方法、装置、终端设备及存储介质
- 血管壁斑块分割方法、装置及计算机可读存储介质
- 三维图像的语义分割方法、装置、设备及存储介质
- 图像分割方法、装置、计算机设备和存储介质
- 图像语义分割标注的方法、装置、存储介质和设备
- 基于改进Unet网络的视网膜血管分割网络、分割方法、计算机设备和存储介质
- 一种基于CT影像的血管分割方法、分割系统、计算设备和存储介质