一种基于视场选通技术的白天星敏成像系统
文献发布时间:2023-06-19 09:32:16
技术领域
本发明属于全天时自主天文导航设计领域,具体涉及一种基于视场选通技术的白天星敏成像系统。
背景技术
星敏感器是一种以恒星作为参考源的姿态测量敏感器,具有精度高、抗干扰性强、可不依赖其他设备进行全自主姿态确定的优点,已在卫星平台上得到广泛应用。将星敏感器由大气层外太空环境扩展到近地空间环境使用,可使舰船、飞机、导弹等近地空间平台摆脱对卫星导航系统的依赖,具有广泛的应用前景,但需要星敏感器具备在强天光背景条件下对暗弱恒星目标的探测能力。
从上世纪50年代前后,美国就已经开始白天亮背景条件下的恒星敏感方法研究。到目前为止,美国、意大利等国家针对高空气球、飞机、以及舰船等平台的应用,研发了多种全天时近地空间星敏感器。
目前,常用的天空背景光抑制方法是通过设计小视场长焦距望远镜,减小探测器单像素立体角来实现的。上世纪80年代,美国Northrop公司就开发了NAS-26恒星导航系统,将全天时星敏感器安装在三轴稳定平台上,从全天区61颗恒星中选择目标恒星进行跟踪,实现惯性导航误差修正。2006年8月,美国Northrop公司研制的LN-120G天文/惯导导航系统在RC-135电子侦察机上完成了首次飞行试验。该系统通过“方位转动平台+俯仰扫描摆镜”的形式,从全天57颗2.5等以上恒星中选择目标恒星进行跟踪。由于牺牲了视场,这种星敏感器视场内往往只有单颗恒星目标,无法采用传统多星匹配方式实现自主定姿,而是采用机械转台等伺服机构对视场内的单颗恒星进行跟踪,其测角精度往往不高。2008年美国Trex Enterprises公司申请专利提出了一种自动天文导航系统。该系统通过观测来自多颗恒星的K波段或H波段的近红外光来进行昼夜导航。采用三个相对大口径望远镜刚性地安装在载体平台上,采用三个H波段的InGaAs探测器相机实现同步测量。该方案虽然未采用机械转台等伺服机构,但由于采用多套小视场望远镜组合的方案,因此其体积重量较大,难以满足机载等平台的应用需求。
由此可见,这些传统的机载天文导航系统均采用了大口径、小视场的光学系统,每次探测时视场内仅有一颗目标星,整个系统需要安装在二维转动/扫描平台上或采用多个望远镜实现同步测量。普遍存在系统庞大、精度低、自主性差缺陷,在小型化平台和高精度应用场合存在诸多局限。因此,亟需研究新型的全天时星敏感器,突破现有星敏感器成像体制的束缚,推动我国实现小型化、高精度和高自主性的白天星敏感器的发展。
发明内容
本发明要解决的技术问题是:针对传统白天星敏感器视场大小和天光背景抑制能力难以兼顾的问题,提出一种基于视场选通技术的白天星敏成像系统。该成像系统利用微透镜与微开关阵列实现瞬时视场的快速选通,并结合选通视场的共靶面设计,同时获得大视场和天光背景的抑制,实现匹配式白天星敏感方法,具有体积小、重量轻、精度高、自主性好等优点。
本发明解决其技术问题所采用的技术方案是:一种基于视场选通技术的白天星敏成像系统,包括:
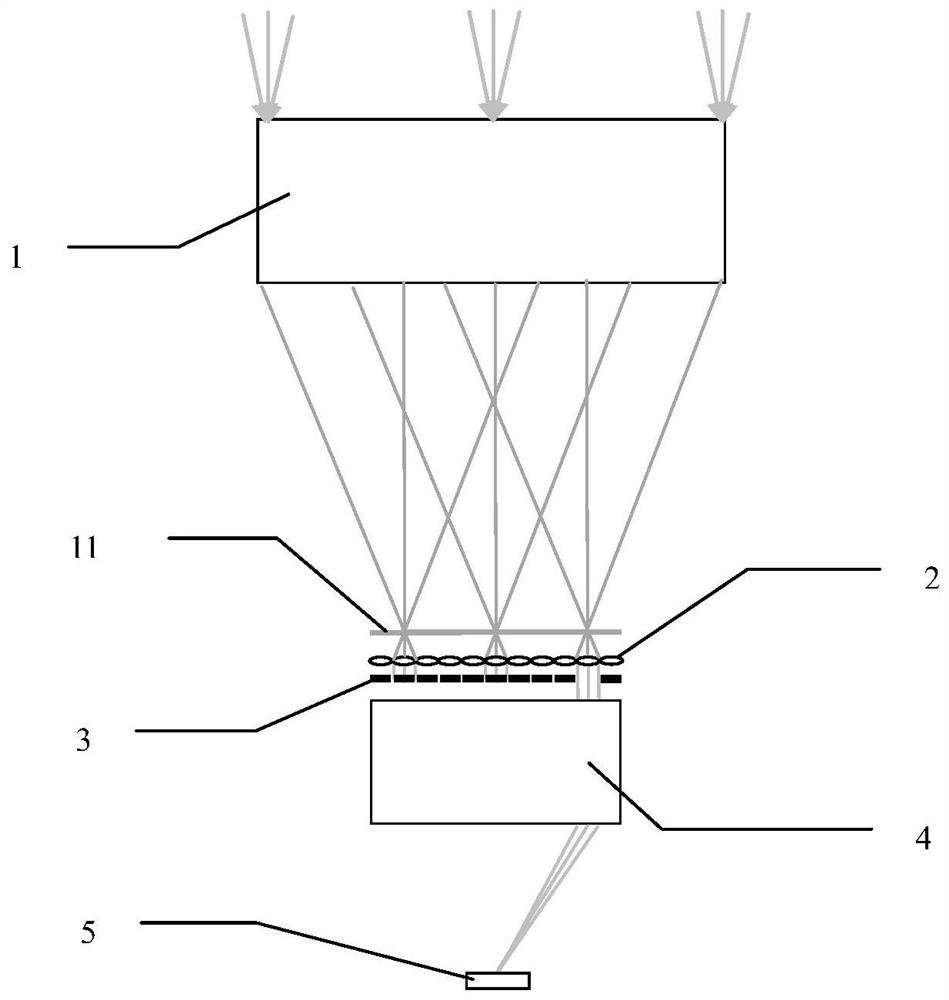
-前端像方远心望远成像系统1,用于将视场内的恒星成像于一次像面;
-微透镜阵列2,用于对一次像面的视场进行细分;
-微开关阵列3,用于对细分视场进行快速选通;
-后端共焦面成像系统4,用于对一次像面上各选通视场内的恒星像进行放大成像;
-阵列探测器5,用于接收各选通视场内经放大成像后的恒星像。
无穷远的恒星信号光由前端像方远心望远成像系统1成像于一次像面;再由微透镜阵列2和微开关阵列3对一次像面的视场进行细分和选通;然后,由后端共焦面成像系统4对一次像面上各选通视场内的恒星像进行放大成像;最后,由阵列探测器5接收各选通视场内经放大成像后的恒星像。
进一步地,所述的一种基于视场选通技术的白天星敏成像系统,前端望远成像系统采用像方远心结构,保证各选通视场内的恒星在成一次像时主光线与微透镜的光轴平行;
进一步地,所述的一种基于视场选通技术的白天星敏成像系统,选通视场的大小可表示为
进一步地,所述的一种基于视场选通技术的白天星敏成像系统,系统的总有效视场小于前端像方远心望远成像系统的视场,且系统的总视场可表示为:
进一步地,所述的一种基于视场选通技术的白天星敏成像系统,微开关阵列的单元数与微透镜阵列的单元数相同,且阵列单元位置一一对应;
进一步地,所述的一种基于视场选通技术的白天星敏成像系统,单元微透镜的F数应该不小于前端望远成像系统的F数,以保证选通视场内对恒星的成像质量及能量利用率;
进一步地,所述的一种基于视场选通技术的白天星敏成像系统,阵列探测器上最终形成的恒星像直径不超过3×3个探测器像素范围,以保证恒星像的能量集中度,能够在白天环境下获得足够的探测信噪比;
进一步地,所述的一种基于视场选通技术的白天星敏成像系统,各选通视场通过微开关阵列快速切换,每个选通视场在选通时共用同一个阵列探测器,但对于不同的选通视场,阵列探测器上同一点对应的天球坐标不同;
进一步地,所述的一种基于视场选通技术的白天星敏成像系统,各视场的选通时长小于100ms,通过微开关阵列的快速切换,可实现在同一阵列探测器上准同时出现多颗恒星像,用于白天环境下的匹配式星敏定姿。
本发明与现有技术相比具有以下优点:
1、与现有的全天时单星跟踪器相比,本发明所述的一种基于视场选通技术的白天星敏成像系统可以摆脱现有技术方案对转动/扫描机构的依赖,具有自主性高、测量精度高等显著优势;
2、与现有多个望远镜组合的星敏感器相比,本发明所述的一种基于视场选通技术的白天星敏成像系统仅需要一个望远镜光学系统即可实现视场内多颗恒星的探测,具有体积小,重量轻等优势;
3、与采用大视场长焦距大靶面星敏感器方案相比,本发明所述的一种基于视场选通技术的白天星敏成像系统无需采用大靶面探测器,各选通视场共用同一个小靶面探测器,大大降低了探测器的技术难度和成本。
附图说明
图1是本发明实施例中的一种基于视场选通技术的白天星敏成像系统的结构示意图;
图中:1为前端像方远心望远成像系统,11为前端像方远心望远成像系统对恒星成像的一次像面,2为微透镜阵列,3为微开关阵列,4为后端共焦面成像系统,5为阵列探测器。
具体实施方式
下面结合附图及具体实施方式详细介绍本发明。但以下的实施例仅限于解释本发明,本发明的保护范围应包括权利要求的全部内容,而且通过以下实施例,本领域的技术人员即可以实现本发明权利要求的全部内容。
实施例1:
本发明实施例1,是一个口径为100mm,F数为15,单像素对应视场角为2.74″,工作波段为1.3~1.7μm,总有效视场为2.66°×2.66°的基于视场选通技术的红外波段白天星敏成像系统。如图1所示,本发明所述的一种基于视场选通技术的白天星敏成像系统包括:前端像方远心望远成像系统1,微透镜阵列2,微开关阵列3,后端共焦面成像系统4和阵列探测器5。其中前端像方远心望远成像系统1的视场为5°×5°,口径为100mm,焦距为300mm;微透镜阵列2的单元口径为3.8mm,焦距为6mm,单元数为7×7;微开关阵列3的单元口径也为3.8mm,单元数也为7×7;后端共焦面成像系统4的口径为30mm,焦距为30mm;阵列探测器5的像元尺寸为20μm,像元阵列数为512×512。
无穷远的恒星信号光由前端像方远心望远成像系统1成像于一次像面,成像质量达到近衍射极限,对应恒星象的尺寸为艾里斑大小,即
实施例2
本发明实施例2,是一个口径为80mm,F数为20,单像素对应视场角为1.5″,工作波段为700nm~900nm,总有效视场为4.58°×4.58°的基于视场选通技术的可见光波段白天星敏成像系统。如图1所示,本发明所述的一种基于视场选通技术的白天星敏成像系统包括:前端像方远心望远成像系统1,微透镜阵列2,微开关阵列3,后端共焦面成像系统4和阵列探测器5。其中前端像方远心望远成像系统1的视场为6°×6°,口径为80mm,焦距为320mm;微透镜阵列2的单元口径为3mm,焦距为7mm,单元数为11×11;微开关阵列3的单元口径也为3mm,单元数也为11×11;后端共焦面成像系统4的口径为35mm,焦距为35mm;阵列探测器5的像元尺寸为13μm,像元阵列数为1024×1024。
无穷远的恒星信号光由前端像方远心望远成像系统1成像于一次像面,成像质量达到近衍射极限,对应恒星象的尺寸为艾里斑大小,即
本发明未详细阐述部分属于本领域技术人员的公知技术。
- 一种基于视场选通技术的白天星敏成像系统
- 一种基于视场选通技术的白天星敏成像系统