一种基于连通区域提取的拉索表面缺陷检测方法
文献发布时间:2023-06-19 09:38:30
技术领域:
本发明涉及一种基于连通区域提取的拉索表面缺陷检测方法,属于数字图像处理领域。
背景技术:
斜拉桥作为现代大跨度桥梁的重要结构形式,在桥梁建设中被广泛应用。斜拉桥的拉索作为整个桥梁主要受力部件,长期暴露在外部环境中并受到风吹日晒恶劣环境的影响和空气污染物的腐蚀,容易造成损坏,损坏后腐蚀性空气和潮湿水雾等就会进入拉索内部,加速钢丝的腐蚀,危及整个桥梁的安全。目前拉索缺陷主要采用人工检测,效率差,危险性高,随着数字图像处理技术的发展,采用连通区域查找的方式,可以有效提取拉索表面缺陷,比起人工维护,效率更高,也更为安全。
发明内容:
本发明的目的:为了解决人工维护拉索,效率差,准确率低,危险性高的问题,提出一种基于连通区域提取的拉索表面缺陷检测方法。
为了实现本发明的目的,拟采用以下技术方案:
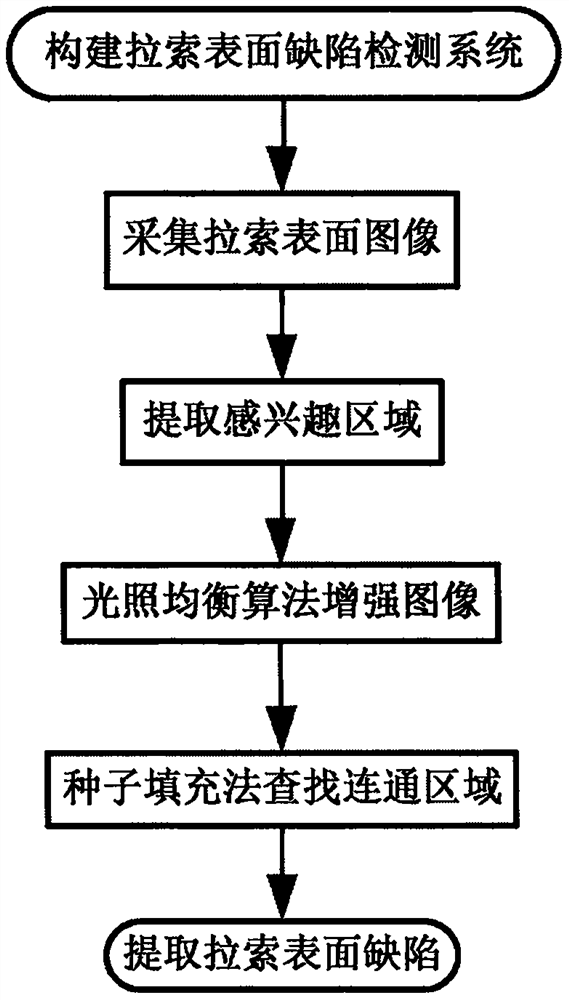
步骤1:构建拉索表面缺陷检测系统;
步骤2:采集拉索表面图像;
步骤3:提取感兴趣区域;
步骤4:采用光照均衡算法增强图像;
步骤5:采用种子填充法查找连通区域;
步骤6:提取拉索表面缺陷。
上述的拉索表面缺陷检测系统包括,拉索爬升机器人、图像采集发射单元和图像接收处理单元,图像采集发射单元包括,摄像头、连接杆和无线信号发射机,图像接收处理单元包括,无线信号接收机、HDMI线I、画面分割器、HDMI线II、信号采集卡、USB连接线和计算机,图像采集发射单元设置在拉索上,摄像头和无线信号发射机设置在连接杆上,连接杆固定在拉索爬升机器人上,无线信号接收机通过HDMI线I与画面分割器相连接,画面分割器通过HDMI线II与信号采集卡相连接,信号采集卡通过USB连接线与计算机相连接,沿拉索爬升机器人的圆周方向至少均匀设置三个图像采集发射单元,每个图像采集发射单元的摄像头与拉索的距离相等。
上述的采集拉索表面图像的过程如下:
(1)图像采集发射单元中的摄像头采集拉索的表面图像;
(2)无线信号发射机将图像信号传输至图像接收处理单元中的无线信号接收机;
(3)无线信号接收机通过HDMI线I将图像信号传送至画面分割器;
(4)画面分割器将图像信号合并成一路图像信号,并通过HDMI线II将合并成一路的图像信号传送至信号采集卡;
(5)信号采集卡通过USB连接线将图像信号输送至计算机。
上述的提取感兴趣区域,是对步骤2获得的图像进行裁剪,提取拉索表面图像。
上述的光照均衡算法增强图像是对步骤3所得到的图像进行图像增强,其过程如下:
(1)将RGB通道图像转换为Lab通道图像,并提取L分量图像P。
(2)求图像P的平均值,对图像P进行滑动窗口扫描,窗口尺寸设置为32*32个像素,窗口每滑动一次,求出窗口内的平均值,扫描完成后得到子图像p;
(3)子图像p中像索值减去图像P的平均值,得到差值图像q,对q采用双立方插值法,扩展到图像P的尺寸,得到图像Q;
(4)将图像P与图像Q相减,得到增强后的图像。
上述的种子填充法查找连通区域的具体过程为,首先通过阈值分割将步骤4得到的增强图像进行二值化,然后采用4邻域像素相邻关系,使用种子填充法查找二值化图像的连通区域,查找完毕,在步骤3得到的图像中用外接矩形框标记出连通区域所在位置。
上述的提取拉索表面缺陷的具体过程为,设置连通区域面积阈值T,小于T的视为噪声等伪缺陷,并去除,最后得到真实的拉索表面缺陷。
本发明的特点:
本发明采用一种基于连通区域提取的方法,检测拉索表面缺陷,解决了人工检测中效率差,危险性高的问题。本发明计算代价低,效率高,准确率高,能快速检测出拉索表面缺陷。
附图说明:
图1为本发明整体流程图。
图2示意了拉索表面缺陷检测系统整体结构。
A、拉索;B、图像采集发射单元;C、图像接受处理单元;1、拉索爬升机器人;2、摄像头;3、连接杆;4、无线信号发射机;5、无线信号接收机;6、HDMI线I;7、画面分割器;8、HDMI线II;9、信号采集卡;10、USB连接线;11、计算机。
图3为感兴趣区域提取后的拉索表面图。
图4为本发明的效果图。
具体实施方式:
下面结合附图说明本发明的具体工作过程:
本发明具体包括以下步骤:
步骤1:构建拉索表面缺陷检测系统;
步骤2:采集拉索表面图像;
步骤3:提取感兴趣区域;
步骤4:采用光照均衡算法增强图像;
步骤5:采用种子填充法查找连通区域;
步骤6:提取拉索表面缺陷。
步骤1:拉索表面缺陷检测系统包括,拉索爬升机器人1、图像采集发射单元B和图像接收处理单元C,图像采集发射单元B包括,摄像头2、连接杆3和无线信号发射机4,图像接收处理单元C包括,无线信号接收机5、HDMI线I6、画面分割器7、HDMI线II8、信号采集卡9、USB连接线10和计算机11,图像采集发射单元B设置在拉索A上,摄像头2和无线信号发射机4设置在连接杆3上,连接杆3固定在拉索爬升机器人1上,无线信号接收机5通过HDMI线I6与画面分割器7相连接,画面分割器7通过HDMI线II8与信号采集卡9相连接,信号采集卡9通过USB连接线10与计算机11相连接,沿拉索爬升机器人1的圆周方向至少均匀设置三个图像采集发射单元B,每个图像采集发射单元B的摄像头2与拉索A的距离相等。
步骤2:采集拉索表面图像的过程如下:
(1)图像采集发射单元B中的摄像头2采集拉索A的表面图像;
(2)无线信号发射机4将图像信号传输至图像接收处理单元C中的无线信号接收机5;
(3)无线信号接收机5通过HDMI线I6将图像信号传送至画面分割器7;
(4)画面分割器7将图像信号合并成一路图像信号,并通过HDMI线II8将合并成一路的图像信号传送至信号采集卡9;
(5)信号采集卡9通过USB连接线10将图像信号输送至计算机11。
步骤3:步骤2获得的图像进行裁剪,提取拉索A表面图像。
步骤4:对步骤3所得到的图像进行图像增强,其过程如下:
(1)将RGB通道图像转换为Lab通道图像,并提取L分量图像P。
(2)求图像P的平均值,对图像P进行滑动窗口扫描,窗口尺寸设置为32*32个像素,窗口每滑动一次,求出窗口内的平均值,扫描完成后得到子图像p;
(3)子图像p中像素值减去图像P的平均值,得到差值图像q,对q采用双立方插值法,扩展到图像P的尺寸,得到图像Q;
(4)将图像P与图像Q相减,得到增强后的图像。
步骤5:采用种子填充法查找连通区域的具体过程为,首先阈值分割将所述步骤4得到的增强图像进行二值化,然后采用4邻域像素相邻关系,使用种子填充法查找二值化图像的连通区域,查找完毕,在步骤3得到的图像中用外接矩形框标记出连通区域所在位置。
步骤6:提取拉索表面缺陷的具体过程为,设置连通区域面积阈值T,小于T的视为噪声等伪缺陷,并去除,最后得到真实的拉索表面缺陷。
本发明工作原理如下:
A、搭建拉索表面缺陷检测系统:拉索爬升机器人1抱夹拉索A,摄像头2和无线信号发射机4设置在连接杆3上,构成一个图像采集单元B,至少三个图像采集发射单元B均匀设置在拉索爬升机器人1圆周方向,可以采集到拉索A一周的图像。图像接收处理单元C中,无线信号接收机5通过HDMI线I6连接画面分割器7,画面分割器7通过HDMI线II8连接信号采集卡9,信号采集卡9又通过USB连接线10连接计算机11,整个图像接收处理单元C负责接收和检测拉索A的表面图像。
B、采集拉索表面图像:拉索爬升机器人1搭载的摄像头2采集拉索A的表面图像,通过连接杆3连接的无线信号发射机4将图像信号传递给无线信号接收机5,无线信号接收机5通过HDMI线I6将多路图像信号传输至画面分割器7,画面分割器7转换成一路图像信号通过HDMI线II传递给信号采集卡9,信号采集卡9通过USB连接线10将图像传输给计算机11显示。
C、提取感兴趣区域:拉索爬升机器人1搭载的图像采集发射单元B在采集拉索A的表面图像时,不可避免地会采集到周边环境,由于摄像头2与拉索A的间距是一定的,所以采集到的图像里拉索A相对于整幅图像其位置也是固定的,针对位置固定这一特性,对图像进行裁剪就可以去除两边的环境背景,提取图像中的感兴趣区域,即拉索A表面。
D、采用光照均衡算法增强图像:由于外界光照不均匀会影响到后续的图像检测过程,所以需要通过光照均衡算法去除光照不均匀的影响。
E、采用种子填充法查找连通区域:选取四邻域作为像素邻接关系,使用种子填充法提取图像的连通区域,并绘制外接矩形框标出连通区域所在位置。
F:提取拉索表面缺陷:提取连通区域时也会将噪声等伪缺陷也提取出来,由于拉索表面缺陷面积较大,所以可以设置连通区域面积阈值T(T的数值根据实际情况调节),小于T的视为噪声等伪缺陷,并去除,最后得到真实的拉索表面缺陷。
- 一种基于连通区域提取的拉索表面缺陷检测方法
- 基于PSO-SVM的桥梁拉索表面缺陷的分类识别方法