基于EMD与稀疏变换的无人设备用非线性抗干扰系统
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及系统抗干扰等领域,特别设计基于EMD与稀疏变换的无人设备用非线性抗干扰系统。
背景技术
近年来,随着人工智能的高速发展,无人机、无人驾驶等技术日益普及,一个强大的抗干扰系统是无人驾驶、无人机等技术安全运行的关键,无人机系统避障系统的稳健保证了无人机的安全运行,无人驾驶数据采集环境差,会因为自身的物理抖动,导致采集图像信号质量差,给无人机安全运行带来巨大干扰。
本发明针对非线性干扰问题,提出基于EMD与稀疏变换的无人设备用非线性抗干扰系统,利用非线性降维的去噪能力,并且使用遗传算法(Genetic Algorithm,GA)对稀疏分解稀疏进行智能寻优,得到高质量的去噪图像。克服了传统抗干扰去噪系统容易造成局部特征丢失的问题。
发明内容
为了解决上述存在问题。本发明提出一种基于EMD与稀疏变换的无人设备用非线性抗干扰系统。为达此目的:
本发明提出基于EMD与稀疏变换的无人设备用非线性抗干扰系统,,其特征在于:
步骤1:初始化数据,把RGB图像转换到YUV空间,且仅仅保留亮度Y分量,得到一维信号X;
步骤2:计算信号X的极值点;
步骤3:根据信号X的极值点,求信号X的上、下包络线X1、X2;
步骤4:根据信号X的上、下包络线,计算包络线的均值Xm;
步骤5:根据包络线的均值和原始信号X,计算包络线的中线Xd;
步骤6:计算得到IMF模态分量IMF1、IMF2、…、IMFn;
步骤7:对模态分量IMFi做字典训练Di;
步骤8:基于字典Di做稀疏分解,得到低维稀疏信号Fi;
步骤9:对低维稀疏信号Fi做自适应阈值去噪;
步骤10:对信号分别做稀疏、EMD重构。
作为本发明进一步改进,所述步骤3中上、下包络线X1、X2为:
X1=X(i),st.X(i)>X(i-1)&&X(i)>X(i+1) (1)
X2=X(i),st.X(i)<X(i-1)&&X(i)<X(i+1) (2)
其中,X(i)是数据X的第i个数据。
作为本发明进一步改进,所述步骤4包络线均值计算公式为:
其中,Xm是包络线均值。
作为本发明进一步改进,所述步骤5包络线中线为:
Xn=interp1(Xm) (4)
Xd=X-Xn (5)
其中,interp1(·)是三插值函数。
作为本发明进一步改进,所述步骤8稀疏分解公式为:
Fi=argmin||IMFi-Di*Fi||
其中,argmin(·)是求最小值函数。
作为本发明进一步改进,所述步骤9中自适应阈值去噪公式为:
其中,mean(·)是求最均值函数,Gi是第i个模态分量IMFi的稀疏分解信号量化后的值。
作为本发明进一步改进,所述步骤10中稀疏与EMD重构公式为:
其中,cIMFi是重构的模态信号,cX是重构原始信号
本发明基于EMD与稀疏变换的无人设备用非线性抗干扰系统,有益效果在于:
1.本发明利用EMD模态分解,增加了系统的鲁棒性。
2.本发明对EMD分量模态分解,增加了信号的保真度。
3.本发明算法复杂度低,实时性强。
4.本发明硬件系统实现简单,成本低。
附图说明
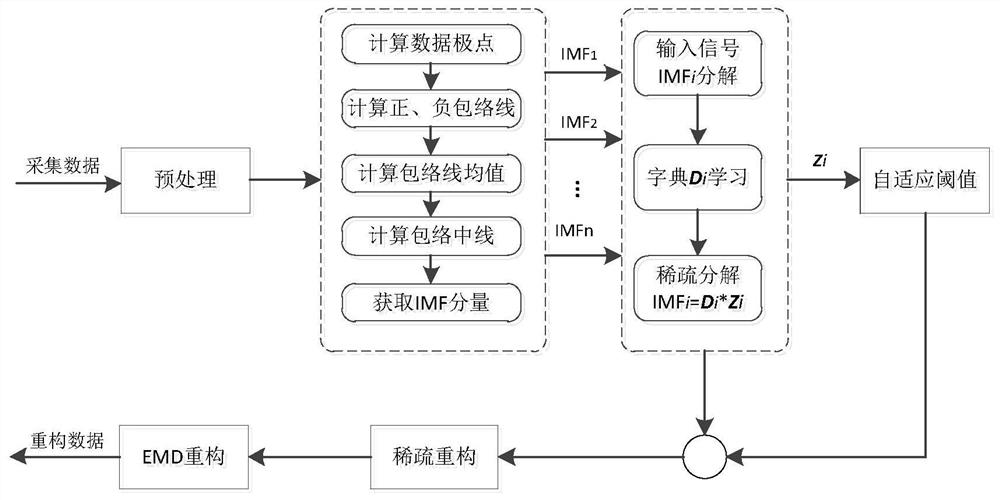
图1系统流程图;
图2图像展为一维信号示意图;
具体实施方式
本发明提出一种基于EMD与稀疏变换的无人设备用非线性抗干扰系统。
下面结合附图与具体实施方式对本发明进一步描述:
本发明提出基于EMD与稀疏变换的无人设备用非线性抗干扰系统,如图1所示是系统流程图,首先,初始化数据,把RGB图像转换到YUV空间,且仅仅保留亮度Y分量,得到一维信号X,如图2所示是图像展为一维信号示意图;接着,计算信号X的极值点,根据信号X的极值点,求信号X的上、下包络线X1、X2;然后根据信号X的上、下包络线,计算包络线的均值Xm;根据包络线的均值和原始信号X,计算包络线的中线Xd;对中线Xd计算得到IMF模态分量IMF1、IMF2、…、IMFn。
上、下包络线X1、X2为:
X1=X(i),st.X(i)>X(i-1)&&X(i)>X(i+1) (1)
X2=X(i),st.X(i)<X(i-1)&&X(i)<X(i+1) (2)
其中,X(i)是数据X的第i个数据。
包络线均值计算公式为:
其中,Xm是包络线均值。
包络线中线为:
Xn=interp1(Xm) (4)
Xd=X-Xn (5)
其中,interp1(·)是三插值函数。
然后,对模态分量IMFi做字典训练Di;基于字典Di做稀疏分解,得到低维稀疏信号Fi;对低维稀疏信号Fi做自适应阈值去噪。
稀疏分解公式为:
Fi=argmin||IMFi-Di*Fi||
其中,argmin(·)是求最小值函数。
自适应阈值去噪公式为:
其中,mean(·)是求最均值函数,Gi是第i个模态分量IMFi的稀疏分解信号量化后的值。
最后,对信号分别做稀疏、EMD重构。
稀疏与EMD重构公式为:
其中,cIMFi是重构的模态信号,cX是重构原始信号
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作任何其他形式的限制,而依据本发明的技术实质所作的任何修改或等同变化,仍属于本发明所要求保护的范围。
具体实施例需要提及所有附图
- 基于EMD与稀疏变换的无人设备用非线性抗干扰系统
- 基于EMD与稀疏变换的无人设备用非线性抗干扰系统