POGO端子自动装料设备
文献发布时间:2023-06-19 09:44:49
技术领域
本发明涉及端子生产制作领域技术,尤其是指一种POGO端子自动装料设备。
背景技术
现有的POGO端子,是一种由针轴、弹簧、针管三个基本部件通过精密仪器铆压预压之后形成的弹簧式探针。POGO端子在焊接安装使用的过程中需要批量将其放置在治具上,现有技术中,主要依靠人工手动将POGO端子逐一装填到治具的容置孔中,效率非常低,并且耗费人力,增加了人工成本。因此,有必要研究一种方案以解决上述问题。
发明内容
有鉴于此,本发明针对现有技术存在之缺失,其主要目的是提供一种POGO端子自动装料设备,其能有效解决现有之采用人工手动将POGO端子装填到治具的容置孔中存在效率低、耗费人力且增加人工成本的问题。
为实现上述目的,本发明采用如下之技术方案:
一种POGO端子自动装料设备,包括有机架、控制装置、治具平移装置、治具放置架、端子装料装置、治具输出装置以及端子输出装置;
该控制装置设置于机架上;
该治具平移装置设置于机架上,治具平移装置连接控制装置,治具平移装置包括有滑座、第一驱动机构、上顶机构以及推出机构;该滑座的前侧具有开口朝前用于放置治具的第一容置槽,该滑座可横向来回活动地设置于机架上;该第一驱动机构设置于机架上并带动滑座横向来回活动;该上顶机构设置于滑座上并位于第一容置槽的下方;该推出机构设置于滑座上并位于第一容置槽的后侧;
该治具放置架、端子装料装置和治具输出装置均设置于机架上并位于治具平移装置的前侧,且治具放置架、端子装料装置和治具输出装置沿滑座的活动方向依次设置,端子装料装置和治具输出装置均连接控制装置;
该端子装料装置包括有定位座、活动托板、第二驱动机构以及下压顶出机构;该定位座上开设有多个横向并排间隔设置的第一容置孔;该活动托板可前后来回活动地设置于定位座的下方,活动托板上开设有多个横向并排间隔设置并与第一容置孔配合的第二容置孔;该第二驱动机构设置于机架上,第二驱动机构带动活动托板前后来回活动;该下压顶出机构设置于定位座的前侧;
该治具输出装置包括有一支架、两定位架、一支撑板、一顶起机构以及限位机构;该支架的前侧具有开口朝前用于放置治具的第二容置槽,两定位架横向间隔设置于支架上,每一定位架上均具有上下开口用于收纳治具的收纳槽,两收纳槽彼此相对并位于第二容置槽两端的正上方;该支撑板可前后来回活动地设置于支架上并位于第二容置槽的后侧,支撑板由第三驱动机构带动而前后来回活动;该顶起机构设置于支架上并位于第二容置槽的下方;该限位机构设置于支架的前侧;
该端子输出装置设置于机架上,端子输出装置连接控制装置,端子输出装置包括有振动盘和多个输出管,该多个输出管的一端均连通振动盘的输出端,该多个输出管的另一端分别连通对应的第一容置孔。
作为一种优选方案,所述第一驱动机构为伺服电机带动的滚珠丝杆机构。
作为一种优选方案,所述上顶机构包括有上顶块和带动上顶块上下来回活动的第一气缸。
作为一种优选方案,:所述推出机构包括有推块和带动推块前后来回活动的第二气缸。
作为一种优选方案,:所述定位座上设置有多个安装孔,该多个安装孔分别倾斜连通对应的第一容置孔,每一安装孔中均安装有传感器,该传感器连接控制装置。
作为一种优选方案,所述第二驱动机构为气缸。
作为一种优选方案,所述下压顶出机构包括有活动块和第三气缸,该活动块的底部并排间隔设置有多个顶针,该多个顶针与对应的第二容置孔配合,该第三气缸带动活动块上下活动。
作为一种优选方案,所述第三驱动机构为气缸。
作为一种优选方案,所述顶起机构包括有顶起块和带动顶起块上下活动的第四气缸。
作为一种优选方案,所述限位机构包括有限位杆和带动限位杆上下活动的第五气缸。
本发明与现有技术相比具有明显的优点和有益效果,具体而言,由上述技术方案可知:
通过利用控制装置控制治具平移装置、端子装料装置、治具输出装置和端子输出装置配合工作,可将POGO端子批量装填到治具的容置孔中,实现自动装料,有效提高了生产效率,并且减少人力耗费,大大降低了人工成本,为生产作业带来便利。
为更清楚地阐述本发明的结构特征和功效,下面结合附图与具体实施例来对本发明进行详细说明。
附图说明
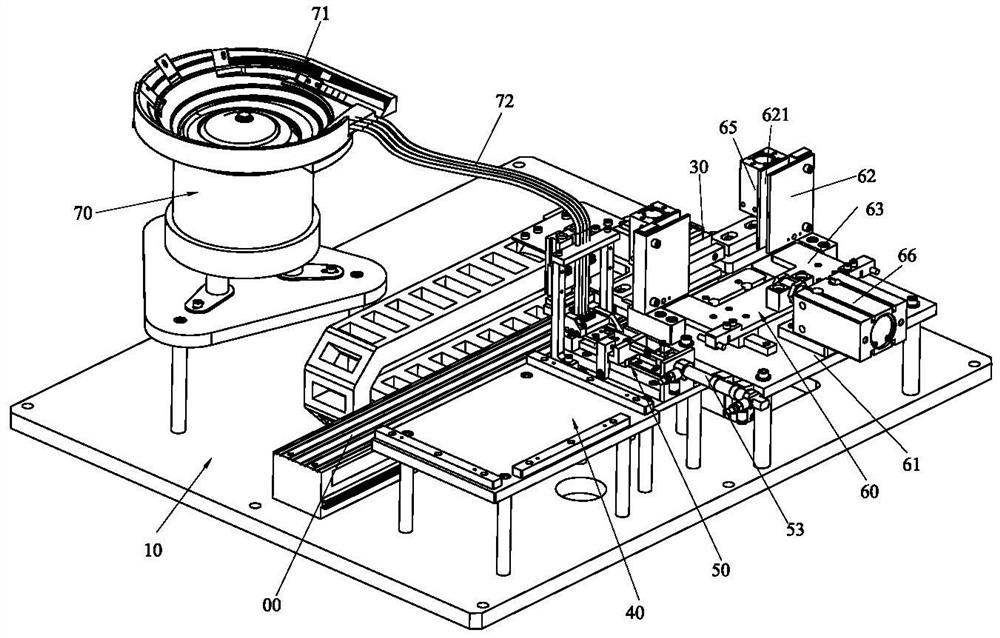
图1是本发明之较佳实施例的立体示意图;
图2是本发明之较佳实施例的局部放大示意图;
图3是本发明之较佳实施例另一角度的放大示意图;
图4是本发明之较佳实施例中治具平移装置的放大示意图;
图5是本发明之较佳实施例中治具放置架的放大示意图;
图6是本发明之较佳实施例中端子装料装置的放大示意图;
图7是本发明之较佳实施例中端子装料装置另一角度的放大示意图;
图8是本发明之较佳实施例中治具输出装置的放大示意图;
图9是本发明之较佳实施例中治具输出装置另一角度的放大示意图。
附图标识说明:
10、机架 20、控制装置
30、治具平移装置 31、滑座
311、第一容置槽 32、第一驱动机构
33、上顶机构 331、上顶块
332、第一气缸 34、推出机构
341、推块 342、第二气缸
40、治具放置架 41、底板
42、支撑柱 43、挡杆
50、端子装料装置 51、定位座
511、第一容置孔 512、安装孔
52、活动托板 521、第二容置孔
53、第二驱动机构 54、下压顶出机构
541、活动块 542、第三气缸
543、顶针 55、传感器
60、治具输出装置 61、支架
611、第二容置槽 62、定位架
621、收纳槽 63、支撑板
64、顶起机构 641、顶起块
642、第四气缸 65、限位机构
651、限位杆 652、第五气缸
66、第三驱动机构 70、端子输出装置
71、振动盘 72、输出管。
具体实施方式
请参照图1至图9所示,其显示出了本发明之较佳实施例的具体结构,包括有机架10、控制装置20、治具平移装置30、治具放置架40、端子装料装置50、治具输出装置60以及端子输出装置70。
该控制装置20设置于机架10上,该控制装置20为带人机界面的PLC控制器。
该治具平移装置30设置于机架10上,治具平移装置30连接控制装置20,治具平移装置30包括有滑座31、第一驱动机构32、上顶机构33以及推出机构34;该滑座31的前侧具有开口朝前用于放置治具(图中未示)的第一容置槽311,该滑座31可横向来回活动地设置于机架10上;该第一驱动机构32设置于机架10上并带动滑座31横向来回活动;该上顶机构33设置于滑座32上并位于第一容置槽311的下方,该上顶机构33用于将治具顶起;该推出机构34设置于滑座31上并位于第一容置槽311的后侧,该推出机构34用于将治具推出。在本实施例中,所述第一驱动机构32为伺服电机带动的滚珠丝杆机构;所述上顶机构33包括有上顶块331和带动上顶块331上下来回活动的第一气缸332;所述推出机构34包括有推块341和带动推块341前后来回活动的第二气缸342。
该治具放置架40、端子装料装置50和治具输出装置60均设置于机架10上并位于治具平移装置30的前侧,且治具放置架40、端子装料装置50和治具输出装置60沿滑座31的活动方向依次设置,端子装料装置50和治具输出装置60均连接控制装置20;具体而言:
该治具放置架40包括有底板41,该底板41的底部设置有多个支撑柱42,该多个支撑柱42均固定在机架10上,底板41的后侧边缘以及左右两侧边缘均设置有挡杆43。
该端子装料装置50包括有定位座51、活动托板52、第二驱动机构53以及下压顶出机构54;该定位座51上开设有多个横向并排间隔设置的第一容置孔511;该活动托板52可前后来回活动地设置于定位座51的下方,活动托板52上开设有多个横向并排间隔设置并与第一容置孔511配合的第二容置孔521;该第二驱动机构53设置于机架10上,第二驱动机构53带动活动托板52前后来回活动;该下压顶出机构54设置于定位座51的前侧。在本实施例中,所述定位座51上设置有多个安装孔512,该多个安装孔512分别倾斜连通对应的第一容置孔511,每一安装孔512中均安装有传感器55,该传感器55用于感测第一容置孔511中是否有POGO端子,该传感器55连接控制装置20;所述第二驱动机构53为气缸;所述下压顶出机构54包括有活动块541和第三气缸542,该活动块541的底部并排间隔设置有多个顶针543,该多个顶针543与对应的第二容置孔521配合,该第三气缸542带动活动块541上下活动。
该治具输出装置60包括有一支架61、两定位架62、一支撑板63、一顶起机构64以及限位机构65;该支架61的前侧具有开口朝前用于放置治具的第二容置槽611,两定位架62横向间隔设置于支架61上,每一定位架62上均具有上下开口用于收纳治具的收纳槽621,两收纳槽621彼此相对并位于第二容置槽611两端的正上方;该支撑板63可前后来回活动地设置于支架61上并位于第二容置槽611的后侧,支撑板63由第三驱动机构66带动而前后来回活动;该顶起机构64设置于支架61上并位于第二容置槽611的下方;该限位机构65设置于支架61的前侧。在本实施例中,所述第三驱动机构66为气缸;所述顶起机构64包括有顶起块641和带动顶起块641上下活动的第四气缸642;所述限位机构65包括有限位杆651和带动限位杆651上下活动的第五气缸652。
该端子输出装置70设置于机架10上,端子输出装置70连接控制装置20,端子输出装置70包括有振动盘71和多个输出管72,该振动盘71位于治具平移装置30的后侧,该多个输出管72的一端均连通振动盘71的输出端,该多个输出管72的另一端分别连通对应的第一容置孔511。
详述本实施例的工作原理如下:
该控制装置20、治具平移装置30、端子装料装置50、治具输出装置60以及端子输出装置70配合工作:首先,将POGO端子倒入振动盘71中,并将待装料的治具叠放在治具放置架40上,接着,振动盘71将POGO端子按序推入各个输出管72中,POGO端子通过对应的输出管72流至对应的第一容置孔511中,再落入对应的第二容置孔521中,与此同时,人工将一治具推至第一容置槽311中,滑座31由第一驱动机构32带动活动,使得治具移至活动托板52的正前方,接着,活动托板52由第二驱动机构53推出,使得活动托板52压抵在治具上,此时第二容置孔521刚好与治具上的容置孔上下正对,然后,下压顶出机构54工作,而将第二容置孔521中的POGO端子全部压入治具的容置孔中完成一组POGO端子的自动装料,接着,端子装料装置50复位并重复上述动作,直至治具上的所有容置孔都装填了POGO端子;然后,滑座31继续移动至治具输出装置60的正前方,此时,顶机构33将完成装料的治具稍微顶起,接着,推出机构34将治具推出至第二容置槽611中,接着,限位机构65工作对治具进行限位,放置治具向前脱离第二容置槽611,然后,顶起机构64工作将治具顶起,使得治具两端进入对应的收纳槽621中,接着,第三驱动机构66带动支撑板63向前活动,利用支撑板63将进入收纳槽621中的治具托住,此时,顶起机构64复位,同时,治具平移装置30也复位对下一治具进行装料。
本发明的设计重点在于:通过利用控制装置控制治具平移装置、端子装料装置、治具输出装置和端子输出装置配合工作,可将POGO端子批量装填到治具的容置孔中,实现自动装料,有效提高了生产效率,并且减少人力耗费,大大降低了人工成本,为生产作业带来便利。
以上所述,仅是本发明的较佳实施例而已,并非对本发明的技术范围作任何限制,故凡是依据本发明的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
- POGO端子自动装料设备
- POGO端子自动装料设备