多臂多自由度骨折复位器
文献发布时间:2023-06-19 10:35:20
技术领域
本发明属于医用设备技术领域,具体涉及一种多臂多自由度骨折复位器。
背景技术
骨折是指骨结构的连续性完全或部分断裂的一种病症,其主要的治疗手段为:通过设备或人工操作的方式使断裂的骨头复位拼接后,再通过固定装置固定断骨并配合药物进行康复治疗。
现有断骨复位技术存在以下问题:1、复位装置的功能过于单一,只能用于简单的撑开或收拢,即单一自由度的运动,断骨复位及定位还需要人工操作。2、复位过程中需要反复定位,在进行定位拍X光片时,医生总是需要往返于手术室内与手术室外,严重影响复位效率,提高复位成本。3、复位精准度难以得到保障,其基本依靠医生的操作经验。4、复位过程非常费力,给医护人员增加了额外的负担,有时还会增加病患的创伤程度。
发明内容
本发明针对现有技术的问题,提供了一种多臂多自由度骨折复位器,包括:至少2根滑杆。所述滑杆的一端固定有第一位移机构。所述第一位移机构上依次安装有第二位移机构、克氏针夹头。所述滑杆上套设有沿滑杆移动的第三位移机构。所述第三位移机构上依次安装有第四位移机构、第二转向机构、克氏针夹头。
进一步的,所述第一位移机构控制第二位移机构在相邻滑杆之间位移。所述第二位移机构控制克氏针夹头沿水平纵轴位移。
进一步的,所述第三位移机构控制第四位移机构在相邻滑杆之间位移。所述第四位移机构控制第二转向机构沿竖直方向位移。所述第二转向机构控制克氏针夹头沿水平横轴在竖直方向转动和/或沿水平纵轴在水平方向转动。
进一步的,所述滑杆在与第一位移机构固定的一端设有防滑安装槽。
进一步的,所述第一位移机构包括:导轨和移动机构。所述导轨上设有齿带,所述导轨与滑杆可拆卸固定连接。所述移动机构套设在导轨上,并与齿带齿接。
进一步的,所述移动机构包括:传动杆、相向设置并相互可拆卸固定连接的第一位移基座和第二位移基座。所述第一位移基座面对第二位移基座的一侧,于下端设有与导轨相匹配的第一导轨槽,于上端设有与传动杆相匹配的第一传动杆槽。所述第一传动杆槽的底端与第一导轨槽的顶端连通。所述传动杆安装在第一传动杆槽位置处,其杆的一端延伸至第一传动杆槽、第一位移基座外部,并在端面上设有传动杆传动槽。所述导轨穿过所述第一导轨槽与传动杆齿接。
进一步的,所述第二位移基座在与第一位移基座对应的位置处设有第二传动杆槽、第二导轨槽。
进一步的,所述第一位移基座上沿水平纵向设有2个以上基座装配埋头孔。所述第二位移基座在相应位置处设有基座装配螺纹孔,基座固定螺钉穿过基座装配埋头孔与基座装配螺纹孔固定。
进一步的,所述导轨为扇形导轨,并在与滑杆对应的位置处均开设有与滑杆相匹配的滑杆安装孔。所述滑杆面对导轨的一端设有导轨安装孔。导轨固定螺钉穿过滑杆安装孔与导轨安装孔螺接紧固。
进一步的,所述第二位移机构为第一水平伸缩装置,其固定端与第一位移机构固定,升缩端与克氏针夹头固定。
进一步的,所述第二位移机构的固定端为:第一位移机构顶端沿水平纵向分别设置的水平通孔和水平螺孔。所述第二位移机构升缩端包括:与水平通孔相匹配的第一水平导向滑杆、与水平螺孔相匹配的水平螺杆。所述第一水平导向滑杆与水平通孔滑动连接,其一端穿过水平通孔与第一支撑片紧固。所述水平螺杆与水平螺孔螺接,其一端穿过水平螺孔与第一支撑片转动连接。
进一步的,所述第一支撑片在与第一水平导向滑杆对应位置处开设有第一水平导向滑杆安装孔,在与水平螺杆对应位置处开设有水平螺杆安装孔。
进一步的,所述第一水平导向滑杆面对第一水平导向滑杆安装孔的一端设有与第一水平导向滑杆安装孔相匹配的第一水平导向滑杆安装段,并在端面上设有第一水平导向滑杆紧固孔。第一水平导向滑杆紧固螺钉的钉体穿过第一水平导向滑杆安装孔与第一水平导向滑杆紧固孔紧固。
进一步的,所述水平螺杆面对水平螺杆安装孔的一端设有与水平螺杆安装孔相匹配的水平螺杆安装段。水平螺杆旋钮与水平螺杆安装段固定连接,其旋钮端底面抵在第一支撑片上,顶端穿过水平螺杆安装孔,并设有旋钮凹槽。
进一步的,所述第二位移机构通过第一转向机构与克氏针夹头连接。
进一步的,所述第一转向机构包括:第一连接块、夹头滑动棒。所述第一连接块在与第一水平导向滑杆对应位置处设有与第一水平导向滑杆相匹配的第一水平导向滑杆紧固孔,在与水平螺杆对应位置处设有与水平螺杆相匹配的水平螺杆旋转孔,在靠近竖直侧壁处与第一水平导向滑杆紧固孔同轴设置第一夹头滑动棒安装孔。所述夹头滑动棒一端的端面上设有第一连接块安装孔。第一连接块螺钉的钉体穿过第一夹头滑动棒安装孔与第一连接块安装孔螺接。所述第一连接块螺钉与第一夹头滑动棒安装孔滑动连接。所述克氏针夹头安装在夹头滑动棒的棒体上。
进一步的,所述第三位移机构包括:两个分别套设在两组滑杆上的滑杆支撑臂。所述滑杆支撑臂之间安装有第二水平位移装置。所述第二水平位移装置的固定端与滑杆支撑臂连接,移动端与第四位移机构连接。
进一步的,所述第二水平位移装置的固定端包括:第二水平导向滑杆和水平螺纹杆。所述第二水平导向滑杆的两个端面上分别设有第二水平导向滑杆螺孔。所述滑杆支撑臂在与第二水平导向滑杆对应位置处设有第二水平导向滑杆安装孔,在与水平螺纹杆对应位置处设有水平螺纹杆安装孔。第二水平导向滑杆紧固螺钉的钉体穿过第二水平导向滑杆安装孔与第二水平导向滑杆螺接。水平螺纹杆的两端分别安装有水平螺纹杆旋钮。所述水平螺纹杆旋钮的旋钮端底面抵在滑杆支撑臂上,顶端穿过水平螺纹杆安装孔,并设有旋钮凹槽。
进一步的,所述第二水平位移装置的移动端包括:设置在第四位移机构上的,与第二水平导向滑杆滑动连接的第二水平导向滑杆通孔,与水平螺纹杆螺接的水平螺纹杆螺孔。
进一步的,所述第四位移机构包括:移动块。所述移动块上安装有竖直位移装置。所述竖直位移装置的固定端与移动块连接,移动端与第二转向机构连接。
进一步的,所述竖直伸缩装置的固定端包括:竖直导向滑杆、竖直螺杆、第二支撑片、与移动块连接的第二连接块。所述第二连接块在与竖直导向滑杆对应位置处设有竖直导向滑杆紧固孔,在与竖直螺杆对应位置处设有竖直螺杆安装孔。所述竖直导向滑杆底端与竖直导向滑杆紧固孔固定连接,顶端设有竖直导向滑杆安装孔。所述竖直螺杆底端与竖直螺杆安装孔转动连接,顶端与竖直螺杆旋钮固定连接。所述第二支撑片在与竖直导向滑杆对应位置处设有第一安装孔,在与竖直螺杆对应位置处设有第二安装孔。竖直导向滑杆紧固螺钉的钉体穿过第一安装孔与竖直导向滑杆安装孔螺接。竖直螺杆旋钮的旋钮端底面抵在第二支撑片上,顶端穿过第二安装孔,并设有旋钮凹槽。
进一步的,所述竖直伸缩装置的移动端包括:设置在第二转向机构上的,与竖直导向滑杆滑动连接的竖直导向滑杆通孔,与竖直螺杆螺接的竖直螺杆螺孔。
进一步的,所述移动块通过连接块转动机构与第二连接块转动连接。
进一步的,所述连接块转动机构包括:第一蜗轮、第一蜗杆。所述第一蜗轮和第一蜗杆相互垂直且齿接的安装在移动块内。第一蜗轮的第一蜗轮轴延伸至移动块外部,并与第二连接块固定。第一蜗杆的一端延伸至移动块外部,并在端面上设有第一蜗杆转动槽。
进一步的,所述移动块内相互垂直且相互连通的设有第一蜗杆空腔和第一蜗轮空腔。所述移动块的外壁在第一蜗杆空腔的一端设有第一蜗杆安装孔,另一端设有第一蜗杆轴孔。所述移动块的外壁在第一蜗轮空腔的一端设有第一蜗轮安装孔,另一端设有第一蜗轮轴孔。
进一步的,所述第一蜗轮安装在第一蜗轮空腔内,包括:第一蜗轮轴,固定在第一蜗轮轴上的涡轮齿。所述第一蜗轮轴穿过第一蜗轮轴孔延伸至移动块外部的一端底部沿轴线设有防滑安装槽,并在端面上设有第一蜗轮轴安装孔,另一端为第一蜗轮轴盖安装段。所述第一蜗轮轴盖安装段上固定安装有第一蜗轮轴盖。所述第一蜗轮轴盖与第一蜗轮安装孔之间夹设有第一蜗轮轴盖挡圈。
进一步的,所述第一蜗杆安装在第一蜗杆空腔内,包括:第一蜗杆轴,固定在第一蜗杆轴上的外螺纹。所述第一蜗杆轴穿过第一蜗杆轴孔延伸至移动块外部的一端,在端面上设有第一蜗杆转动凹槽,另一端为第一蜗杆轴盖安装段。所述第一蜗杆轴盖安装段上固定安装有第一蜗杆轴盖。所述第一蜗杆轴盖与第一蜗杆安装孔之间夹设有第一蜗杆轴盖挡圈。
进一步的,所述第二连接块在与第一蜗轮轴对应位置处设有涡轮轴通孔。第一蜗轮轴紧固螺钉的钉体穿过涡轮轴通孔与第一蜗轮轴安装孔螺接。
进一步的,所述第二转向机构包括:转向基座、第二蜗轮、第二蜗杆。所述第二蜗轮和第二蜗杆相互垂直且齿接的安装在转向基座内。第二蜗轮的第二蜗轮轴延伸至转向基座外部,并与第二连接块固定。第二蜗杆的一端延伸至转向基座外部,并在端面上设有第二蜗杆转动槽。
进一步的,所述转向基座内相互垂直且相互连通的设有第二蜗杆空腔和第二蜗轮空腔。所述转向基座的外壁在第二蜗杆空腔的一端设有第二蜗杆安装孔,另一端设有第二蜗杆轴孔。所述转向基座的外壁在第二蜗轮空腔的一端设有第二蜗轮安装孔,另一端设有第二蜗轮轴孔。
进一步的,所述第二蜗轮安装在第二蜗轮空腔内,包括:第二蜗轮轴,固定在第二蜗轮轴上的涡轮齿。所述第二蜗轮轴穿过第二蜗轮轴孔延伸至转向基座外部的一端底部沿轴线设有防滑安装槽,并在端面上设有第二蜗轮轴安装孔,另一端为第二蜗轮轴盖安装段。所述第二蜗轮轴盖安装段上固定安装有第二蜗轮轴盖。所述第二蜗轮轴盖与第二蜗轮安装孔之间夹设有第二蜗轮轴盖挡圈。
进一步的,所述第二蜗杆安装在第二蜗杆空腔内,包括:第二蜗杆轴,固定在第二蜗杆轴上的外螺纹。所述第二蜗杆轴穿过第二蜗杆轴孔延伸至转向基座外部的一端,在端面上设有第二蜗杆转动凹槽,另一端为第二蜗杆轴盖安装段。所述第二蜗杆轴盖安装段上固定安装有第二蜗杆轴盖。所述第二蜗杆轴盖与第二蜗杆安装孔之间夹设有第二蜗杆轴盖挡圈。
进一步的,所述第二连接块在与第二蜗轮轴对应位置处设有涡轮轴通孔。第二蜗轮轴紧固螺钉的钉体穿过涡轮轴通孔与第二蜗轮轴安装孔螺接。
进一步的,所述克氏针夹头安装在夹头滑动棒上,所述夹头滑动棒通过滑动棒连接块与第二蜗轮轴固定连接。
进一步的,所述第二蜗轮轴延伸至转向基座外部一端的端面上设有第二蜗轮轴紧固孔。所述滑动棒连接块在面对第二蜗轮轴的一端设有与第二蜗轮轴相匹配的第二蜗轮轴安装孔,在对面夹头滑动棒的一端设有与夹头滑动棒相匹配的夹头滑动棒安装孔。第二蜗轮轴紧固螺钉穿过第二蜗轮轴安装孔与第二蜗轮轴紧固孔螺接。
进一步的,所述多臂多自由度骨折复位器还包括:克氏针导向器。所述克氏针导向器包括:导向器基座、导向器握把、滑动克氏针导向棒、固定克氏针导向棒。
进一步的,所述导向器基座包括:滑槽。所述滑槽一端设有基座盲孔,另一端设有基座螺纹孔。所述导向器握把与基座盲孔固定可拆卸安装,所述滑动克氏针导向棒与滑槽可拆卸滑动固定安装,所述固定克氏针导向棒与基座螺纹孔螺接安装。
进一步的,所述导向器握把包括:手持握把部分。所述手持握把部分底端设有安装插头。所述安装插头与所述基座盲孔相匹配。
进一步的,所述滑动克氏针导向棒包括:第一克氏针套、滑块、卡簧。所述第一克氏针套中轴处开设有第一克氏针通孔。所述第一克氏针套靠近顶端的部分自上而下依次设有上挡片、滑块外螺纹、套筒卡簧槽。所述滑块外形与滑槽相匹配,竖直中轴处设有与滑块外螺纹相匹配的内螺纹孔。所述内螺纹孔底端设有与上挡片相匹配的下挡片。所述上挡片、下挡片均宽于滑槽的槽宽。
进一步的,所述固定克氏针导向棒包括:第二克氏针套。所述第二克氏针套中轴处开设有第二克氏针通孔。所述第二克氏针套靠近顶端的部分设有与基座螺纹孔相匹配的套筒螺纹。
本发明所述水平纵向、水平横向、竖直等方向性描述均为相对方向的描述而非绝对水平或竖直的描述。在实际使用过程中,一般以断骨拟复位的骨头轴线为水平纵向,水平横向、竖直等方向基于该水平纵向相对变化。
本发明所述克氏针夹头采用后端设有棒孔,前端设有夹具的现有克氏针夹具。所述夹头滑动棒为与现有克氏针夹具的后端棒孔相匹配的圆棒。
本发明至少具有以下优点之一:
1.本发明多臂多自由度骨折复位器,可以实现对至少5个自由度方向的控制,可以很好的控制克氏针进行复位移动,从而带动断骨进行复位移动。
2.本发明多臂多自由度骨折复位器,在各自由度的控制移动过程中均比较省力,有效节约了医生的体力,进而也提高了断骨复位的准确度和稳定性。
3.本发明多臂多自由度骨折复位器,通过多自由度的控制系统控制克氏针的移动实现对断骨的控制复位,操作人员通过对于克氏针的观察,即可大概获知断骨的相对朝向和位置,极大的减少了复位过程中的X光拍片频次。
4.本发明采用多臂设计,装置在使用过程中,尤其是在进行多自由度复位操作过程中更加稳定,一方面降低医生的操作难度,另一方面显著降低患者在复位过程中的痛苦程度。
附图说明
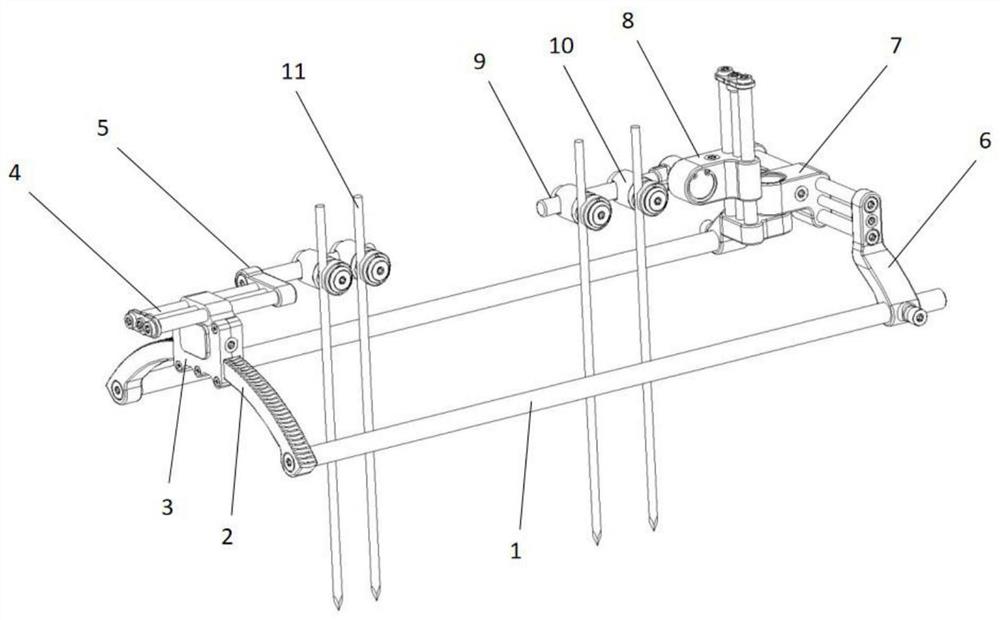
图1所示为本发明多臂多自由度骨折复位器的结构示意图。
图2所示为本发明滑杆的结构示意图。
图3所示为本发明导轨的结构示意图。
图4所示为本发明移动机构、第二位移机构、第一转向机构的结构示意图。
图5所示为本发明第三位移机构的结构示意图。
图6所示为本发明第四位移机构的结构示意图。
图7所示为本发明第二转向机构的结构示意图。
图8所示为本发明克氏针导向器的结构示意图。
图9所示为图8的装配结构示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图,对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
实施例1
一种多臂多自由度骨折复位器,如图1所示,包括:2根或4跟成左右两组且相互平行设置设置或3跟相互平行或其他数量相互平行的滑杆1。所述滑杆1的一端固定有第一位移机构。所述第一位移机构上依次安装有第二位移机构4、克氏针夹头10。所述滑杆1上套设有沿滑杆1移动的第三位移机构6。所述第三位移机构6上依次安装有第四位移机构7、第二转向机构8、克氏针夹头10。
所述第一位移机构控制第二位移机构4在相邻滑杆1之间位移。所述第二位移机构4控制克氏针夹头10沿水平纵轴位移。
所述第三位移机构6控制第四位移机构7在相邻滑杆1之间位移。所述第四位移机构7控制第二转向机构8沿竖直方向位移。所述第二转向机构8控制克氏针夹头10沿水平横轴在竖直方向转动和/或沿水平纵轴在水平方向转动。
如图2所示,所述滑杆1在与第一位移机构固定的一端设有防滑安装槽102。该设置可使滑杆1和第一位移机构之间的连接更加稳固。
该装置的使用过程为:首先根据X片,在需要复位的断骨上,于适当的位置的方向分别打入至少1枚克氏针。然后将第二位移机构4上的克氏针夹头10夹住其中1根断骨的克氏针或克氏针组上。之后,通过调节第一位移机构、第二位移机构4、第三位移机构6、第四位移机构7、第二转向机构8,使第二转向机构8靠近另1根断骨的克氏针或克氏针组,并用第二转向机构8上的克氏针夹头10夹住该断骨上的克氏针或克氏针组。最后,通过调节第一位移机构、第二位移机构4、第四位移机构7、第二转向机构8,使两根断骨的接骨处相互匹配,并调节第三位移机构6使两组克氏针夹头10相互靠拢,进而带动断骨的两部分相互挤压,从而实现断骨复位操作。
实施例2
基于实施例1所述多臂多自由度骨折复位器,如图1所示,所述第一位移机构包括:导轨2和移动机构3。所述导轨2上设有齿带201,所述导轨2与滑杆1可拆卸固定连接。所述移动机构3套设在导轨2上,并与齿带201齿接。
如图3所示,所述导轨2为扇形导轨,采用扇形导轨设计,可使第二位移机构4在移动机构3的带动下,使得第二位移机构4上的克氏针夹头10进行定圆心的圆弧转动,而圆弧转动的圆心点在克氏针上,通过调节克氏针在骨骼内的深度,使得该圆心落在骨骼的轴线上,即可使骨骼进行沿骨骼轴线的转动,降低骨骼进行转动调整时病人的痛苦,也便于医生进行两截断骨的截面对准操作。导轨2在与滑杆1对应的位置处均开设有与滑杆1相匹配的滑杆安装孔202。所述滑杆1面对导轨2的一端设有导轨安装孔101。导轨固定螺钉203穿过滑杆安装孔202与导轨安装孔101螺接紧固。该设置可实现滑杆1和导轨2的可拆卸固定安装,便于零件的拆换维护。
如图4所示,所述移动机构3包括:传动杆303、相向设置并相互可拆卸固定连接的第一位移基座301和第二位移基座302。所述第一位移基座301面对第二位移基座302的一侧,于下端设有与导轨2相匹配的第一导轨槽3012,于上端设有与传动杆303相匹配的第一传动杆槽3013。所述第一传动杆槽3013的底端与第一导轨槽3012的顶端连通。所述传动杆303上设有涡轮齿,并安装在第一传动杆槽3013位置处,其杆的一端延伸至第一传动杆槽3013、第一位移基座301外部,并在端面上设有传动杆传动槽3031。所述传动杆传动槽3031为一字型或十字形或梅花形或多边形凹槽。所述导轨2穿过所述第一导轨槽3012与传动杆303齿接。
所述第二位移基座302在与第一位移基座301对应的位置处设有第二传动杆槽3023、第二导轨槽3022。
此时,用与传动杆传动槽3031相匹配的起子插入传动杆传动槽3031内,然后通过转动传动杆303带动其涡轮齿转动,并在涡轮齿的带动下使与传动杆303转动连接且相互固定的第一位移基座301和第二位移基座302,沿导轨2上的齿带位移。
所述第一位移基座301上沿水平纵向设有2个或3个或4个或其他需要数量的基座装配埋头孔3011。所述第二位移基座302在相应位置处设有基座装配螺纹孔3021,基座固定螺钉304穿过基座装配埋头孔3011与基座装配螺纹孔3021固定。该设置可实现第一位移基座301和第二位移基座302之间的可拆卸固定,便于拆换维护其中的零件。
实施例3
基于实施例1所述多臂多自由度骨折复位器,如图1所示,所述第二位移机构为第一水平伸缩装置,其固定端与第一位移机构固定,升缩端与克氏针夹头10固定。
如图4所示,所述第二位移机构的固定端为:第一位移机构顶端沿水平纵向分别设置的水平通孔3024和水平螺孔3025。所述第二位移机构升缩端包括:与水平通孔3024相匹配的第一水平导向滑杆401、与水平螺孔3025相匹配的水平螺杆402。所述第一水平导向滑杆401与水平通孔3024滑动连接,其一端穿过水平通孔3024与第一支撑片403紧固。所述水平螺杆402与水平螺孔3025螺接,其一端穿过水平螺孔3025与第一支撑片403转动连接。
所述第一支撑片403在与第一水平导向滑杆401对应位置处开设有第一水平导向滑杆安装孔4031,在与水平螺杆402对应位置处开设有水平螺杆安装孔4032。
所述第一水平导向滑杆401面对第一水平导向滑杆安装孔4031的一端设有与第一水平导向滑杆安装孔4031相匹配的第一水平导向滑杆安装段4011,并在端面上设有第一水平导向滑杆紧固孔。第一水平导向滑杆紧固螺钉404的钉体穿过第一水平导向滑杆安装孔4031与第一水平导向滑杆紧固孔紧固。此时,克氏针夹头10直接固定在第一水平导向滑杆401上。
所述水平螺杆402面对水平螺杆安装孔4032的一端设有与水平螺杆安装孔4032相匹配的水平螺杆安装段4021。水平螺杆旋钮405与水平螺杆安装段4021固定连接,其旋钮端底面抵在第一支撑片403上,顶端穿过水平螺杆安装孔4032,并设有旋钮凹槽。所述旋钮凹槽为一字型或十字形或梅花形或多边形凹槽。此时,以图示朝向为例,水平螺杆旋钮405的钮端底面抵在第一支撑片403左侧,水平螺杆402的杆面抵在第一支撑片403右侧。
此时,用与旋钮凹槽相匹配的起子插入旋钮凹槽内,然后带动水平螺杆402沿顺时针或逆时针方向转动。以一种水平螺孔3025及水平螺杆402的螺纹朝向为例,当水平螺杆402顺时针转动时,由于水平螺孔3025所在的第一位移机构相对位置固定,因此水平螺杆402会相对水平螺孔3025所在的第一位移机构进行水平向左位移。由于水平螺杆旋钮405的旋钮端底面抵在第一支撑片403上,因此当水平螺杆402向左位移时,会抵压带动第一支撑片403向左位移,并进一步带动固定连接在第一支撑片403上的第一水平导向滑杆401向左位移,从而带动与第一水平导向滑杆401固定连接的其他装置,如克氏针夹头10向左运动。其中,第一水平导向滑杆401一方面起到导向作用,另一方面可以防止第一支撑片403和其他装置在水平螺杆402转动时,与水平螺杆402一起转动而非进行要求的水平位移。逆时针旋转时发生与上述过程相同的运动过程,运动方向为向右。采用另一种水平螺孔3025及水平螺杆402的螺纹朝向时,水平螺杆402顺时针转动时带动其他装置向右位移,逆时针转动时带动其他装置向左位移。
实施例4
基于实施例3所述多臂多自由度骨折复位器,如图4所示,所述第二位移机构通过第一转向机构5与克氏针夹头10连接。所述第一转向机构5包括:第一连接块5、夹头滑动棒9。所述第一连接块5在与第一水平导向滑杆401对应位置处设有与第一水平导向滑杆401相匹配的第一水平导向滑杆紧固孔5011,在与水平螺杆402对应位置处设有与水平螺杆402相匹配的水平螺杆旋转孔5012,在靠近竖直侧壁处与第一水平导向滑杆紧固孔5011同轴设置第一夹头滑动棒安装孔5013。所述夹头滑动棒9一端的端面上设有第一连接块安装孔901。第一连接块螺钉502的钉体穿过第一夹头滑动棒安装孔5013与第一连接块安装孔901螺接。所述第一连接块螺钉502与第一夹头滑动棒安装孔5013滑动连接。所述克氏针夹头10安装在夹头滑动棒9的棒体上。此时,以图示朝向为例,水平螺杆旋钮405的钮端底面抵在第一支撑片403右侧即可。当水平螺杆402向右运动时,通过抵压第一连接块5,带动第一连接块5向右运动,同时带动与第一连接块5固定的第一水平导向滑杆401向右运动。
此时,扭动第一连接块螺钉502,即可带动夹头滑动棒9沿夹头滑动棒9的轴线转动,进而带动安装在夹头滑动棒9棒体上的克氏针夹头10转动,从而增加1个可调节的自由度,便于装置与克氏针更加容易实现贴合和紧固。
实施例5
基于实施例1所述多臂多自由度骨折复位器,如图1所示,所述第三位移机构6包括:两个或三个过四个或其他需要数量的,分别套设在滑杆1的滑杆支撑臂601。所述滑杆支撑臂601之间安装有第二水平位移装置。所述第二水平位移装置的固定端与滑杆支撑臂601连接,移动端与第四位移机构7连接。
如图5所示,所述第二水平位移装置的固定端包括:第二水平导向滑杆602和水平螺纹杆603。所述第二水平导向滑杆602的两个端面上分别设有第二水平导向滑杆螺孔6021。所述滑杆支撑臂601在与第二水平导向滑杆602对应位置处设有第二水平导向滑杆安装孔6012,在与水平螺纹杆603对应位置处设有水平螺纹杆安装孔6013。第二水平导向滑杆紧固螺钉606的钉体穿过第二水平导向滑杆安装孔6012与第二水平导向滑杆602螺接。水平螺纹杆603的两端分别安装有水平螺纹杆旋钮604。所述水平螺纹杆旋钮604的旋钮端底面抵在滑杆支撑臂601上,顶端穿过水平螺纹杆安装孔6013,并设有旋钮凹槽。所述旋钮凹槽为一字型或十字形或梅花形或多边形凹槽。
所述第二水平位移装置的移动端包括:设置在第四位移机构7上的,与第二水平导向滑杆602滑动连接的第二水平导向滑杆通孔7011,与水平螺纹杆603螺接的水平螺纹杆螺孔7012。
此时,用与旋钮凹槽相匹配的起子插入旋钮凹槽内,然后带动水平螺纹杆603沿顺时针或逆时针方向转动。以一种水平螺纹杆螺孔7012及水平螺纹杆603的螺纹朝向为例,当水平螺纹杆603顺时针转动时,由于水平螺纹杆603所在的位置相对固定,因此水平螺纹杆螺孔7012所在的第四位移机构7会相对水平螺纹杆603进行水平向左位移。由于第二水平导向滑杆602的限制和导向作用,第四位移机构7只能在螺纹的带动下发生向左位移而非跟随水平螺纹杆603转动。逆时针旋转时发生与上述过程相同的运动过程,运动方向为向右。采用另一种水平螺纹杆螺孔7012及水平螺纹杆603的螺纹朝向时,水平螺纹杆603顺时针转动时带动其他装置向右位移,逆时针转动时带动其他装置向左位移。
实施例6
基于实施例1所述多臂多自由度骨折复位器,如图1所示,所述第四位移机构7包括:移动块701。所述移动块701上安装有竖直位移装置。所述竖直位移装置的固定端与移动块701连接,移动端与第二转向机构8连接。
如图6所示,所述竖直伸缩装置的固定端包括:竖直导向滑杆710、竖直螺杆711、第二支撑片712、与移动块701连接的第二连接块708。所述第二连接块708在与竖直导向滑杆710对应位置处设有竖直导向滑杆紧固孔7081,在与竖直螺杆711对应位置处设有竖直螺杆安装孔7082。所述竖直导向滑杆710底端与竖直导向滑杆紧固孔7081固定连接,顶端设有竖直导向滑杆安装孔7101。所述竖直螺杆711底端与竖直螺杆安装孔7082转动连接,顶端与竖直螺杆旋钮714固定连接。所述第二支撑片712在与竖直导向滑杆710对应位置处设有第一安装孔7081,在与竖直螺杆711对应位置处设有第二安装孔7082。竖直导向滑杆紧固螺钉713的钉体穿过第一安装孔7081与竖直导向滑杆安装孔7101螺接。竖直螺杆旋钮714的旋钮端底面抵在第二支撑片712上,顶端穿过第二安装孔7082,并设有旋钮凹槽。
所述竖直伸缩装置的移动端包括:设置在第二转向机构8上的,与竖直导向滑杆710滑动连接的竖直导向滑杆通孔8011,与竖直螺杆711螺接的竖直螺杆螺孔8012。
此时,用与旋钮凹槽相匹配的起子插入旋钮凹槽内,然后带动竖直螺杆711沿顺时针或逆时针方向转动。以一种竖直螺杆螺孔8012及竖直螺杆711的螺纹朝向为例,当竖直螺杆711顺时针转动时,由于竖直螺杆711所在的位置相对固定,因此竖直螺杆螺孔8012所在的第二转向机构8会相对竖直螺杆711进行竖直向上位移。由于竖直导向滑杆710的限制和导向作用,第二转向机构8只能在螺纹的带动下发生向上位移而非跟随竖直螺杆711转动。逆时针旋转时发生与上述过程相同的运动过程,运动方向为向下。采用另一种竖直螺杆螺孔8012及竖直螺杆711的螺纹朝向时,竖直螺杆711顺时针转动时带动其他装置向下位移,逆时针转动时带动其他装置向上位移。
实施例7
基于实施例6所述多臂多自由度骨折复位器,如图1所示,所述移动块701通过连接块转动机构与第二连接块708转动连接。
如图6所示,所述连接块转动机构包括:第一蜗轮702、第一蜗杆705。所述第一蜗轮702和第一蜗杆705相互垂直且齿接的安装在移动块701内。第一蜗轮702的第一蜗轮轴延伸至移动块701外部,并与第二连接块708固定。第一蜗杆705的一端延伸至移动块701外部,并在端面上设有第一蜗杆转动槽。
所述移动块701内相互垂直且相互连通的设有第一蜗杆空腔7013和第一蜗轮空腔7015。所述移动块701的外壁在第一蜗杆空腔7013的一端设有第一蜗杆安装孔,另一端设有第一蜗杆轴孔7014。所述移动块701的外壁在第一蜗轮空腔7015的一端设有第一蜗轮安装孔7016,另一端设有第一蜗轮轴孔。
所述第一蜗轮702安装在第一蜗轮空腔7015内,包括:第一蜗轮轴7021,固定在第一蜗轮轴7021上的涡轮齿。所述第一蜗轮轴7021穿过第一蜗轮轴孔延伸至移动块701外部的一端底部沿轴线设有防滑安装槽,并在端面上设有第一蜗轮轴安装孔,另一端为第一蜗轮轴盖安装段7022。所述第一蜗轮轴盖安装段7022上固定安装有第一蜗轮轴盖703。所述第一蜗轮轴盖703与第一蜗轮安装孔7016之间夹设有第一蜗轮轴盖挡圈704。
所述第一蜗杆705安装在第一蜗杆空腔7013内,包括:第一蜗杆轴7051,固定在第一蜗杆轴7051上的外螺纹。所述第一蜗杆轴7051穿过第一蜗杆轴孔7014延伸至移动块701外部的一端,在端面上设有第一蜗杆转动凹槽,另一端为第一蜗杆轴盖安装段7052。所述第一蜗杆轴盖安装段7052上固定安装有第一蜗杆轴盖706。所述第一蜗杆轴盖706与第一蜗杆安装孔之间夹设有第一蜗杆轴盖挡圈707。
所述第二连接块708在与第一蜗轮轴7021对应位置处设有涡轮轴通孔7083。第一蜗轮轴紧固螺钉709的钉体穿过涡轮轴通孔7083与第一蜗轮轴安装孔螺接。
此时,首先将第一蜗轮702和第一蜗杆705安装至移动块701的对应空腔内,第一蜗轮702的安装方式为:首先将第一蜗轮轴7021需要自第一蜗轮轴孔穿出的一端对准第一蜗轮轴孔,然后将第一蜗轮轴7021自第一蜗轮安装孔7016处装入第一蜗轮空腔7015内,并使第一蜗轮轴7021自第一蜗轮轴孔穿出。然后将第一蜗轮轴盖挡圈704弯曲并夹设在在第一蜗轮轴盖703和第一蜗轮安装孔7016之间。最后松开第一蜗轮轴盖挡圈704,使其恢复原状并卡在第一蜗轮轴盖703和第一蜗轮安装孔7016之间。第一蜗杆705的安装方式与第一蜗轮702一致。安装完第一蜗轮702和第一蜗杆705后,仅需要动过起子插入第一蜗杆转动凹槽或其他辅助工具带动第一蜗杆轴7051转动,进而带动与之固定的外螺纹转动,从而带动与外螺纹齿接的涡轮齿转动,涡轮齿带动与之固定的第一蜗轮轴7021转动,第一蜗轮轴7021带动与之固定连接的其他机构转动,从而实现对第二连接块708的转动调节。该设置可以增加1个可调节的自由度,便于装置与克氏针更加容易实现贴合和紧固。
实施例8
基于实施例1所述多臂多自由度骨折复位器,如图7所示,所述第二转向机构8包括:转向基座801、第二蜗轮802、第二蜗杆805。所述第二蜗轮802和第二蜗杆805相互垂直且齿接的安装在转向基座801内。第二蜗轮802的第二蜗轮轴延伸至转向基座801外部,并与第二连接块808固定。第二蜗杆805的一端延伸至转向基座801外部,并在端面上设有第二蜗杆转动槽。
所述转向基座801内相互垂直且相互连通的设有第二蜗杆空腔8013和第二蜗轮空腔8015。所述转向基座801的外壁在第二蜗杆空腔8013的一端设有第二蜗杆安装孔,另一端设有第二蜗杆轴孔8014。所述转向基座801的外壁在第二蜗轮空腔8015的一端设有第二蜗轮安装孔8016,另一端设有第二蜗轮轴孔。
所述第二蜗轮802安装在第二蜗轮空腔8015内,包括:第二蜗轮轴8021,固定在第二蜗轮轴8021上的涡轮齿。所述第二蜗轮轴8021穿过第二蜗轮轴孔延伸至转向基座801外部的一端底部沿轴线设有防滑安装槽,并在端面上设有第二蜗轮轴安装孔,另一端为第二蜗轮轴盖安装段8022。所述第二蜗轮轴盖安装段8022上固定安装有第二蜗轮轴盖803。所述第二蜗轮轴盖803与第二蜗轮安装孔8016之间夹设有第二蜗轮轴盖挡圈804。
所述第二蜗杆805安装在第二蜗杆空腔8013内,包括:第二蜗杆轴8051,固定在第二蜗杆轴8051上的外螺纹。所述第二蜗杆轴8051穿过第二蜗杆轴孔8014延伸至转向基座801外部的一端,在端面上设有第二蜗杆转动凹槽,另一端为第二蜗杆轴盖安装段8052。所述第二蜗杆轴盖安装段8052上固定安装有第二蜗杆轴盖806。所述第二蜗杆轴盖806与第二蜗杆安装孔之间夹设有第二蜗杆轴盖挡圈807。
上述装置的使用和安装过程与实施例7所述连接块转动机构一致,通过起子或其他装置带动第二蜗杆805转动,进而带动与第二蜗轮轴8021固定的第二连接块808转动。
所述第二连接块808在与第二蜗轮轴8021对应位置处设有涡轮轴通孔8083。第二蜗轮轴紧固螺钉809的钉体穿过涡轮轴通孔8083与第二蜗轮轴安装孔螺接。
所述克氏针夹头10安装在夹头滑动棒9上,所述夹头滑动棒9通过滑动棒连接块808与第二蜗轮轴固定连接。
所述第二蜗轮轴延伸至转向基座801外部一端的端面上设有第二蜗轮轴紧固孔。所述滑动棒连接块808在面对第二蜗轮轴的一端设有与第二蜗轮轴相匹配的第二蜗轮轴安装孔8081,在对面夹头滑动棒9的一端设有与夹头滑动棒9相匹配的夹头滑动棒安装孔8082。第二蜗轮轴紧固螺钉穿过第二蜗轮轴安装孔8081与第二蜗轮轴紧固孔螺接。该设置可实现夹头滑动棒9与第二蜗轮轴8021之间的可拆卸固定安装。
加装的滑动棒连接块808一方面起到将夹头滑动棒9与第二蜗轮轴8021固定的作用,另一方面可以控制夹头滑动棒9与第二蜗轮轴8021之间的相对朝向。例如:第二蜗轮轴安装孔8081与夹头滑动棒安装孔8082相互垂直时,可将第二蜗轮轴8021的轴线转动转变为夹头滑动棒9的弧线转动。第二蜗轮轴安装孔8081与夹头滑动棒安装孔8082轴线重合时,可将第二蜗轮轴8021的轴线转动转变为夹头滑动棒9的同轴线转动。第二蜗轮轴安装孔8081的轴线与夹头滑动棒安装孔8082轴线互成角度时,可将第二蜗轮轴8021的轴线转动转变为夹头滑动棒9的不同朝向弧线转动。从而增加可控的调节自由度。
根据本发明的1个实施例,所述多臂多自由度骨折复位器还包括:克氏针导向器。所述克氏针导向器包括:导向器基座18、导向器握把19、滑动克氏针导向棒20、固定克氏针导向棒21。
所述导向器基座18包括:滑槽1801。所述滑槽1801一端设有基座盲孔1802,另一端设有基座螺纹孔1803。所述导向器握把19与基座盲孔1802固定可拆卸安装,所述滑动克氏针导向棒20与滑槽1801可拆卸滑动固定安装,所述固定克氏针导向棒21与基座螺纹孔1803螺接安装。
所述导向器握把19包括:手持握把部分1901。所述手持握把部分1901底端设有安装插头1902。所述安装插头1902与所述基座盲孔1802相匹配。
所述滑动克氏针导向棒20包括:第一克氏针套2001、滑块2006、卡簧2007。所述第一克氏针套2001中轴处开设有第一克氏针通孔2005。所述第一克氏针套2001靠近顶端的部分自上而下依次设有上挡片2002、滑块外螺纹2003、套筒卡簧槽2004。所述滑块2006外形与滑槽1801相匹配,竖直中轴处设有与滑块外螺纹2003相匹配的内螺纹孔20061。所述内螺纹孔20061底端设有与上挡片2002相匹配的下挡片20062。所述上挡片2002、下挡片20062均宽于滑槽1801的槽宽。
所述固定克氏针导向棒21包括:第二克氏针套2101。所述第二克氏针套2101中轴处开设有第二克氏针通孔2103。所述第二克氏针套2101靠近顶端的部分设有与基座螺纹孔1803相匹配的套筒螺纹2102。
该装置的使用过程为:首先将卡簧2007取下,并转动第一克氏针套2001使上挡片2002、下挡片20062相对滑槽1801的上下端面分离。然后根据需要,将第一克氏针套2001和滑块2006在滑槽1801内滑动至需要的位置。之后转动第一克氏针套2001使上挡片2002、下挡片20062相对滑槽1801的上下端面贴紧,并将卡簧2007卡入,使第一克氏针套2001在摩擦力的作用下不能相对滑槽1801滑动。最后,沿第一克氏针套2001的第一克氏针通孔2005和第二克氏针套2101的第二克氏针通孔2103,向骨骼内打入克氏针。该装置可以对克氏针起到必要的导向和打针时的稳定作用,避免克氏针打松或打歪,进而影响之后使用复位器进行的骨科复位操作。
本发明至少具有以下优点之一:
1.本发明多臂多自由度骨折复位器,可以实现对至少5个自由度方向的控制,可以很好的控制克氏针进行复位移动,从而带动断骨进行复位移动。
2.本发明多臂多自由度骨折复位器,在各自由度的控制移动过程中均比较省力,有效节约了医生的体力,进而也提高了断骨复位的准确度和稳定性。
3.本发明多臂多自由度骨折复位器,通过多自由度的控制系统控制克氏针的移动实现对断骨的控制复位,操作人员通过对于克氏针的观察,即可大概获知断骨的相对朝向和位置,极大的减少了复位过程中的X光拍片频次。
4.本发明采用多臂设计,装置在使用过程中,尤其是在进行多自由度复位操作过程中更加稳定,一方面降低医生的操作难度,另一方面显著降低患者在复位过程中的痛苦程度。
应该注意到并理解,在不脱离本发明权利要求所要求的精神和范围的情况下,能够对上述详细描述的本发明做出各种修改和改进。因此,要求保护的技术方案的范围不受所给出的任何特定示范教导的限制。
- 单臂多自由度骨折复位器
- 多臂多自由度骨折复位器